













學會扶墻的機器人:沒有什么能讓我倒下
本文經AI新媒體量子位(公眾號ID:QbitAI)授權轉載,轉載請聯系出處。
人類在走路不穩或者對路況不熟悉的情況下,都會下意識地用手來扶住身邊的支撐物以保持平衡。但對于雙足機器人而言,這種技能才剛剛被解鎖。
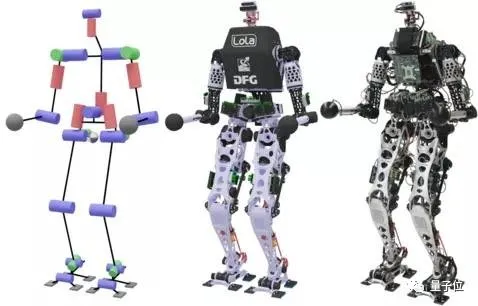
近日,德國慕尼黑工業大學開發的LOLA雙足步行機器人又一次升級,實現了依靠上肢輔助的多觸點移動(multi-contact locomotion)。
簡而言之就是,雙足機器人走路更像人類了。
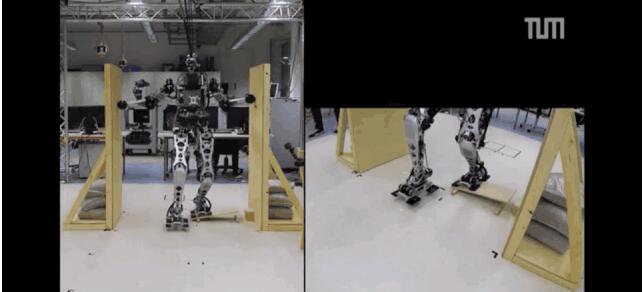
比如,扶住墻壁“小心翼翼”地通過崎嶇不平的路面。
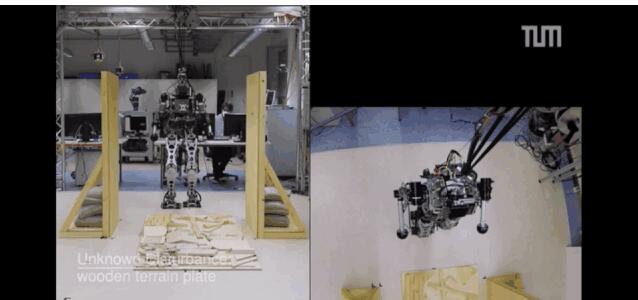
在遇到“陷阱”時,立刻用手臂扶住墻壁站穩。
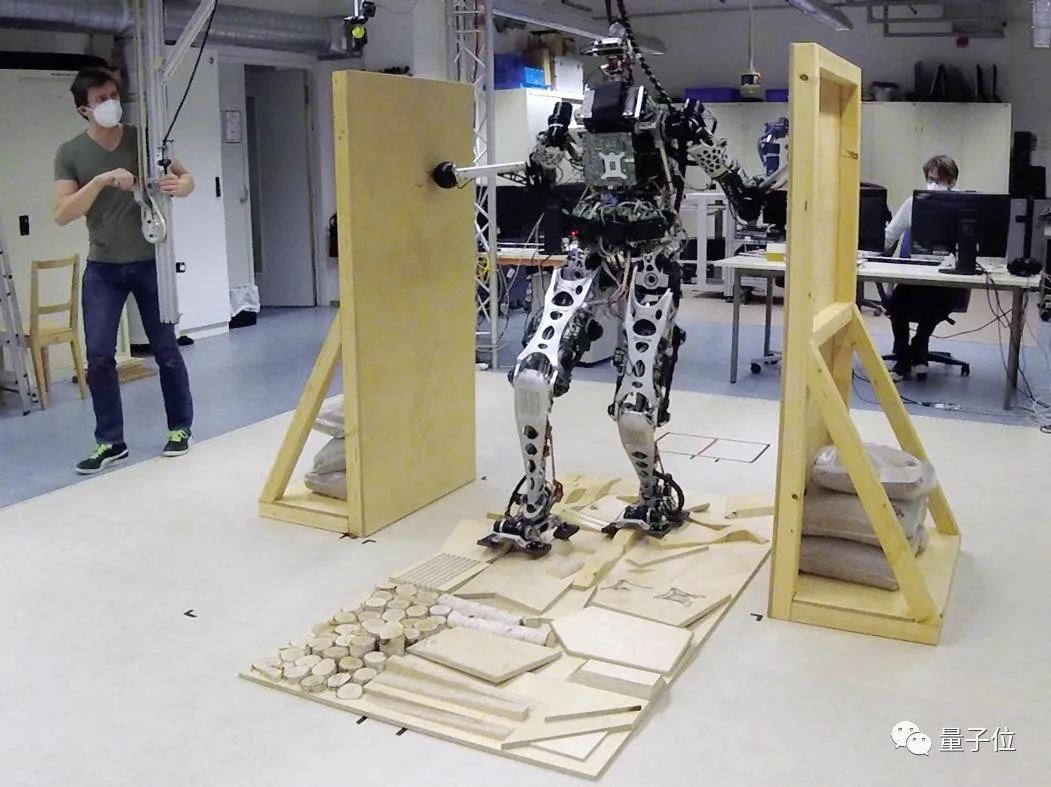
支撐住穩定的物體便不會被輕易推倒

在前進中順勢扶一下桌子穩定身體

△像不像閃了腰的你(不是)
LOLA機器人進化史
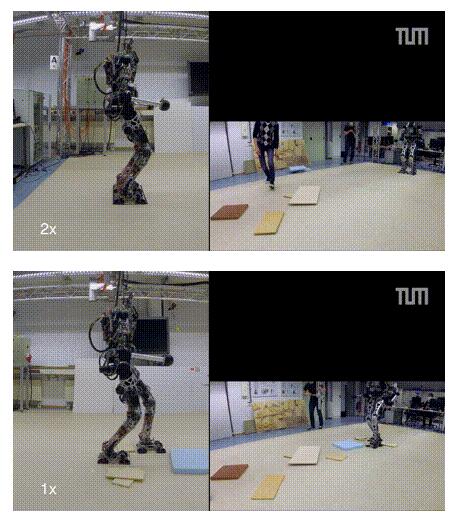
其實早在2019年,LOLA機器人就實現了自主行走。
今年3月,它又實現了在不平整地面上自主行走,應對突發情況時還可快速做出反應。
這樣看,扶墻前行似乎有些畫蛇添足?
顯然不是。在實際行走過程中,即便是人類也無法預判所有突發情況,當我們對前方路段判斷失誤時,就會需要上肢來輔助支撐身體保持平衡。如果沒有上肢的輔助,那只有一個結果——摔個狗啃屎。
這就是為什么要使用多點支撐移動,對于人類來說這是一項非常有用的技能,于機器人而言亦是如此。
機器人扶墻,真的很難
越是有用的技能,往往難度越大。
想要雙足機器人手臂扶墻移動還保持平衡,并不是看上去那么簡單。因為這種情況下,機器人自身形成了超靜定結構,在完成手臂扶墻后的瞬間,機體的受力結構發生了巨大的變化,想要繼續保持平衡,便需要重新核算。
對此,研發人員首先對LOLA機器人的硬件進行了升級。
此前,LOLA機器人的雙臂主要是用來彌補快速行走時雙腳的動態效應。軀干設計相較簡單,并不能承受在多觸點移動過程中由上臂“扶墻”帶來的負荷。
為此,在這次升級中,科學家們重新設計了LOLA的上半身:從骨盆開始提高軀干的強度,對關鍵元件減輕重量并提高硬度,調整手臂關節設計及連桿長度以達到更多的工作空間。
軟件方面,LOLA采用了層次性架構。
在最高層次上,視覺系統先生成一個環境模型,并估計場景中機器人的6D姿態。然后,行走模式生成器使用這些信息來規劃一個動態模型,引導LOLA到預定的目標位置。
在較低層次上,穩定模塊來進一步完善這個環節,以補償模型或其他因素產生的誤差,并保持整體的平衡。
長期目標
研發團隊表示,LOLA機器人的一個長期科學目標是為了了解人類行走的必要元素和控制機制,它的腿部運動學設計和人體非常相似。
“我們與運動技能學的科學家們一起,試圖找出目前為止人類步態行動與LOLA步態行動之間的異同。“
研發團隊希望通過這項研究,一方面能為直立行走的控制機制提供新思路,另一方面能證明目前對人類步態的生物力學模型的理解是否正確。
雖然研究人員認為,雙足機器人用雙臂來輔助直立步態是非常合理的,但是展望未來,他們更期待雙足機器人如何利用它們的四肢以非人類的方式移動。














