













谷歌的一項新研究,讓機器狗小跑起來成為可能
本文轉自雷鋒網,如需轉載請至雷鋒網官網申請授權。
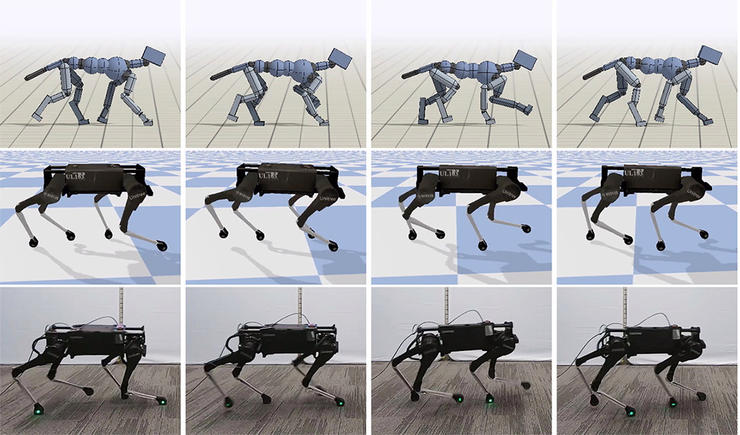
3月4日,據外媒Tech Xplor報道,谷歌、佐治亞理工學院和加州大學伯克利分校(UC Berkeley)的研究人員聯合發表了一篇論文,詳細介紹了他們構建的一個通過AI技術自學走路的四足機器人Rainbow Dash。它只需花費約數個小時,就能自己學會向前、向后以及左右轉彎等運動。
有觀點認為,盡管機器人很能干,能代替人類實現很多事情,但自然形成的原始動物還是比他們好很多。之所以這樣說是因為,他們很難直接從狗身上學會像狗一樣去走路。
但是,近期谷歌人工智能實驗室的一項研究顛覆了人們對于這件事的認知,讓這個環節變得容易多了。
雷鋒網了解到,這項研究是谷歌人工智能實驗室與加州大學伯克利分校一起合作進行的,目的是找到一種能夠高效、自動地將狗在輕快地小跑這種“敏捷行為”轉移到四足機器人身上的方法。這類事情以前就有人做過,但正如研究人員的博客文章所指出的那樣,既定的培訓過程往往“需要大量的專家洞察力,而且通常涉及對每項所需技能漫長的獎勵調整過程”。
學會適應環境的隨機性
當然,這個摸索和擴展的過程是非常不容易的,甚至必要時需要配合手動調整以確保動物的動作能被機器人很好地模仿。而即使是一個非常像狗的機器人實際上也不是狗,而且狗的移動方式可能也不是機器人應該有的方式,因為這會導致后者摔倒、被鎖住或以其他方式失敗告終。
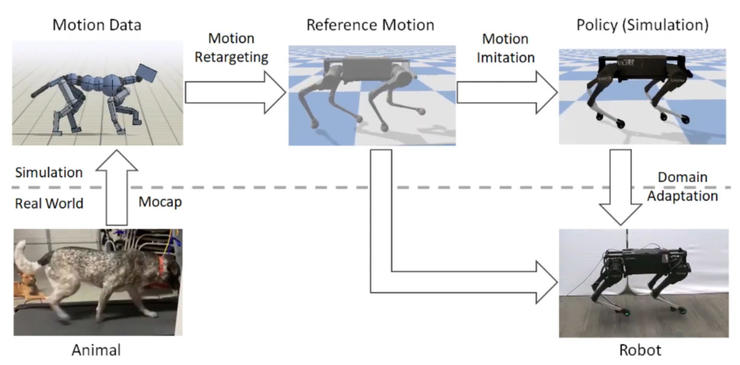
谷歌人工智能項目通過在正常的秩序中添加一些可控制的混亂來解決這個問題。通常情況下,狗的動作會被捕捉,像腳和關節這樣的關鍵點會被仔細追蹤。在數字模擬中,這些點將近似于機器人的點,虛擬版的機器人試圖用自己的動作來模擬狗的運動,學習它的動作。
到目前為止,一切都很好,但真正的問題是當你試圖用模擬的結果來控制一個真正的機器人時,現實世界并不是一個具有理想化的摩擦規則的二維平面。不幸的是,這意味著未經修正的基于模擬的步態會使機器人直接在現實中的地面開始行走。
雷鋒網了解到,為了防止這種情況的發生,研究人員在模擬中使用的物理參數中加入了隨機因素,使得虛擬機器人的重量更大,或者電機更弱,或者與地面的摩擦更大。這使得描述如何走路的機器學習模型不得不考慮到如何抵消各種各樣、微小的差異和它們在生產過程中造成的復雜情況。
學會適應這種隨機性,使得四足機器人學習走路的方法在現實世界中更加穩健,可以模仿目標狗的行走,甚至更復雜的動作,比如轉彎和旋轉,而不需要任何人工干預,只需要一點額外的虛擬訓練。
當然,如果需要的話,手動調整仍然可以添加到混合中,但就目前的情況來看,這與以前完全自動完成的工作相比是一個很大的改進。
谷歌對機器人的探索
除了這個四足機器人,年初谷歌推出了一款基于AI的聊天機器人,名叫Meena,與此前最新的聊天機器人相比,它可以進行更合理、更具體的對話。
據公開數據,Meena有26億個參數,并接受了341 GB文本的訓練,這些文本從公共領域的社交媒體對話中被篩選出來。與現有最新的生成模型OpenAI GPT-2相比,Meena具有1.7倍的模型容量,并接受了8.5倍的數據進行訓練。可以使得聊天的過程更為有趣。
另外,當我們還在為自己芯片研發苦苦掙扎的時候,谷歌AI已經可以自己設計芯片。
根據公開信息,用AI來設計AI芯片,最初是因為谷歌設計算法的速度要遠高于芯片設計的時間,比如某些神經網絡架構已經出來了,但是匹配的硬件加速器還是兩年前的,這樣使得先進的算法只能在比較“落后”的硬件上運行,因此它的運行狀況就不會理想。要解決這個問題,谷歌最終給出的方案就是“讓AI設計AI芯片”,這樣芯片的設計時間就會大為縮短。
而未來,這種技術很有可能在機器人上應用,從而使得機器人具備“意識”······
談及Google 機器人的輝煌經歷,最早可以追溯到2013 年。
那一年,被稱為 Android 之父的 Andy Rubin 親自掛帥,連續收購了 9 個機器人公司,其中包括當時專為軍方研究機器人的 波士頓動力、以及曾在 DARPA 機器人挑戰賽中獲勝的 Schaft等。可以說,他們的起點非常高。
然而,2017 年,波士頓動力被賣給了軟銀,隨后Schaft也被正式關閉。
近年來,他們繼續在四足機器人方面發力,包括此次讓機器狗小跑起來的這項研究,不知是不是后悔當年痛失波士頓動力。
根據工研院 IEK 的研究報告預估,預計至 2021 年,全球智能機器人的市場規模將增長至 336 億美元。
除了Google、亞馬遜、微軟,還有許多初創公司也投入到了機器人領域。但依據當前市場情況來看,能夠進入市場的商業化機器人還比較少。
而就在去年,波士頓動力宣布Spot將四足機器人開始商業化,同年已經有一些企業收到了Spot并展開應用測試,它們在人類的操控下完成建筑工地巡檢、巡航追蹤工程進度等工作。到了11月,Spot迎來了第一個商業買家——德國公司HoloBuilder,該公司與波士頓動力的合作,進一步推動建筑行業的數字化和自動化,將現實捕捉的大量工作轉移到機器人平臺上去。

今年2月20日,據日本媒體報道,日本鹿島建設株式會社發布消息稱,已在施工現場引入了四足行走機器人“Spot”。利用四足行走機器人在隧道施工現場進行實證試驗后,還對其進行升級以應對更加惡劣的地形,希望能使得“Spot”不僅能完成自動化巡邏等任務,還可以緩解建筑行業人手不足的問題。
波士頓動力創始人兼CEO雷博特曾表示:機器人將比互聯網還強大。互聯網提供了大眾一個知識接觸的管道,但是并沒有給予人們接觸真實世界的機會,但機器人加上互聯網可以讓人類操控、拿取實體物件,也就是又增加了一個認識世界的維度。
或許在錯失波士頓動力這件事情上,很難說得上好壞,但谷歌機器人項目的一舉一動,仍然值得我們關注。



















