













特斯拉、蔚來、小鵬三款主流智能駕駛產品測評
汽車智能化浪潮已經來臨,智能駕駛的競爭也日趨激烈,傳統(tǒng)主機廠與Tier1供應商、造車新勢力、互聯(lián)網巨頭、創(chuàng)新科技公司都想要從智能化的進程中分一杯羹。
那么,揭開表面的營銷,過濾掉資本的泡沫,單從產品表現(xiàn)和技術能力上來評判,當前的智能駕駛水平到底怎么樣?主流產品都有什么樣的特點?我們近期專門選取了幾款市場上已經量產的主流智能駕駛產品,進行對標測評。
本次我們測評的對象是特斯拉Model3、蔚來ES8和小鵬P7,軟件均已升級到2021年5月以后的版本。
我們的測評從兩個維度展開:(1)細分場景下的功能表現(xiàn);(2)人機交互效果。
文末附有幾款主流產品的配置與技術演化路線,作為本次測評的補充信息。
一、細分場景下的功能表現(xiàn)
本次測評,我們直接對標了3款車型的最高階智能駕駛功能:高速領航輔助駕駛,即Model3的NOA功能,ES8的NOP功能,以及P7的NGP功能。
1.1 場景范圍與分類
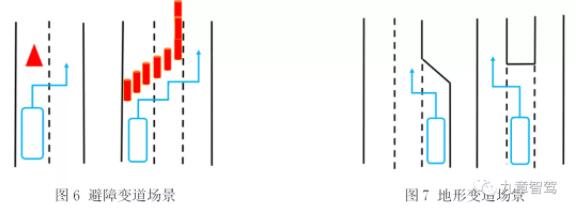
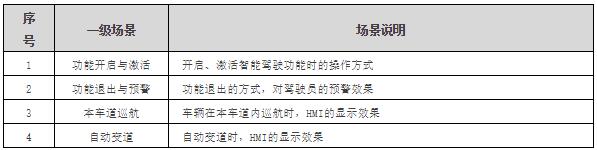
從場景來看,主要有車輛在本車道巡航和自動變道兩大類場景,這兩大類場景則可細化到表1和圖1~圖7中的各類細分場景。
表1 高速領航輔助駕駛的場景
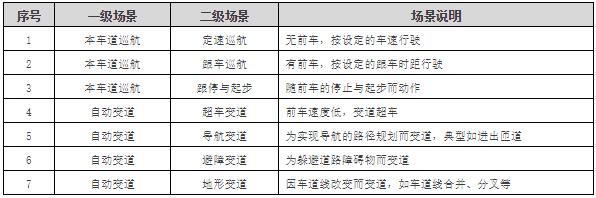
圖1 定速巡航場景
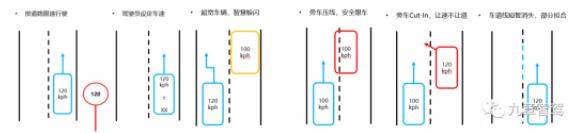
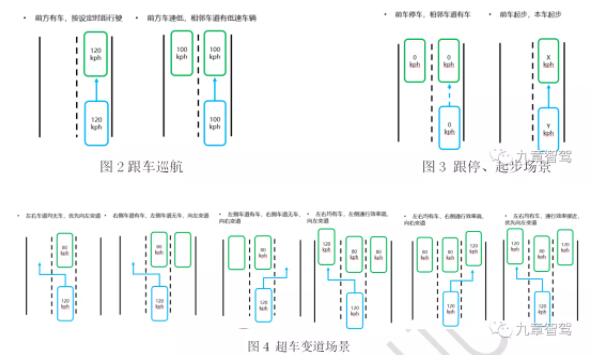
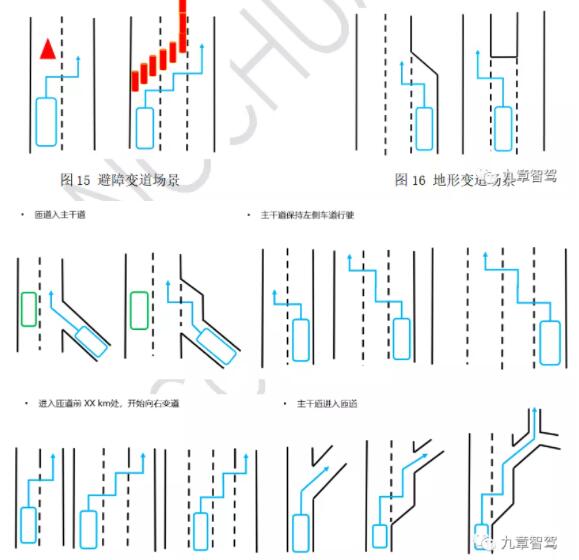
圖5 導航變道場景
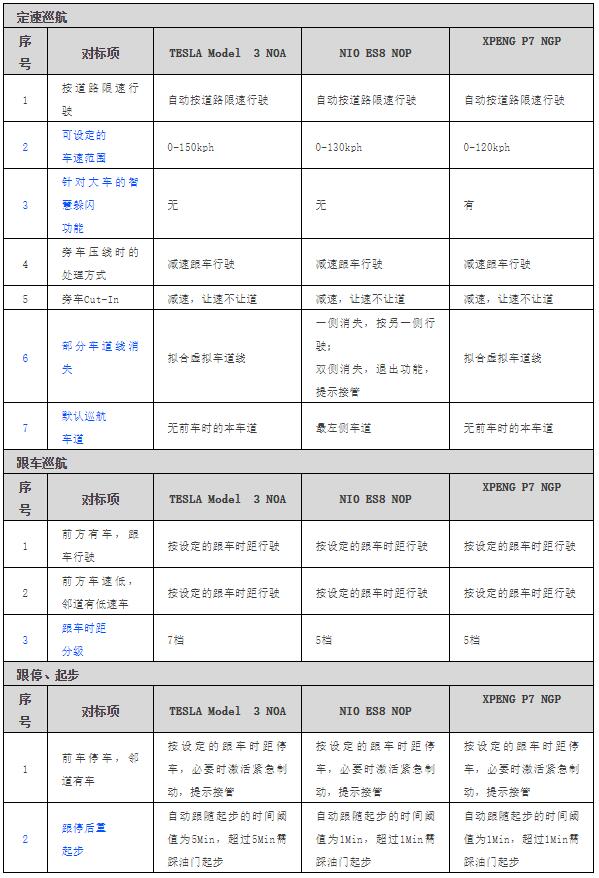
2.2 巡航場景下的功能表現(xiàn)
從表2可以看出,在巡航場景下,3款產品的策略與功能表現(xiàn)類似,都會自動按道路限速行駛;前方有車時,按設定的跟車時距行駛;旁車侵入時,減速但不讓道等。
但部分場景下仍有所區(qū)別。如可設定的車速范圍,Model3較為激進,150kph內都可以激活NOA功能,ES8和P7則更符合國內法規(guī)的要求。
在車道線消失的情況下,Model3和P7可以憑借更優(yōu)的算法,擬合一段車道線保證功能正常,而ES8則沒有能力。
針對相鄰車道有大型車輛的場景,P7實現(xiàn)了智慧躲閃功能,讓車內人員更有安全感;跟停后重新起步的時間閾值也有所不同,Model3更為激進,ES8和P7則相對保守。
表2 巡航場景的功能表現(xiàn)(藍色字體是表現(xiàn)不同項)
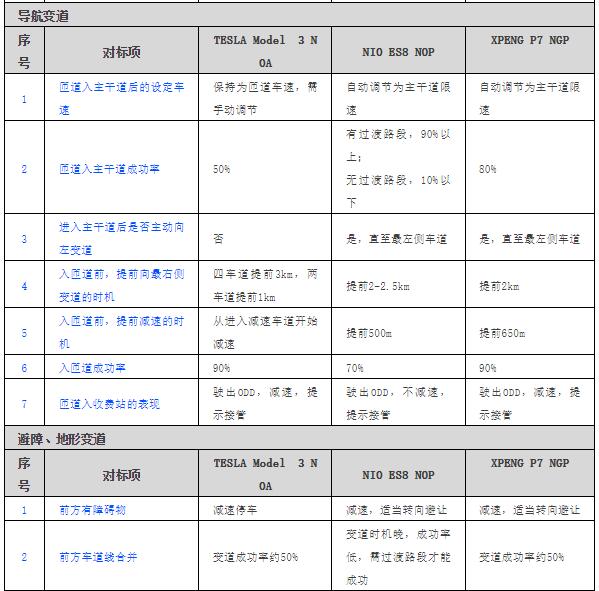
1.3 變道場景下的功能表現(xiàn)
在自動變道場景中,3款產品的功能表現(xiàn)有較大差別,體現(xiàn)出不同的性能差異和駕駛風格。
超車變道時,Model3只要被壓速,就會尋找時機變道超車,而ES8和P7則會耐心等待,只有速度被壓制到一定程度時,才會主動變道。
在車道選取的策略上,三者都符合常理地選擇車流量小的車道,但Model3對于左右車道沒有優(yōu)先級,而ES8和P7則符合中國的駕駛規(guī)則,優(yōu)先向左變道。
Model3對于自己的變道決策結果非常自信,只要決定變道,就一定會找機會完成,ES8和P7則會在多次失敗后,終止變道決策。
導航變道時,Model3匯入主路后不能自動調節(jié)車速,需要駕駛員手動調節(jié),這一項體驗很差。
匯入主路后,Model3不向左側車道變道,ES8和P7自動變道至最左側車道,這都不是最優(yōu)策略,我們認為,四車道自動選擇左側第二車道,雙車道和三車道自動選擇最左側車道,更加符合國情。
由于Model3沒有融合高精地圖,因此匯入主路的成功率較低,而ES8的感知能力偏弱,需要有過渡路段才能提高匯入主路的成功率,P7則憑借良好的感知能力與高精地圖,達到了80%的匯入主路成功率。
在駛出主路進入匝道時,Model3和P7都表現(xiàn)出較高的成功率,而ES8由于感知能力不強,成功率偏低。
進入匝道前,3款產品都有提前變道和減速的動作,但是提前的時機和減速時機各不相同,并且與當時的交通車流量也有關系。
駛出ODD進入收費站時,ES8不減速,這一點體驗感差。
對于路面有障礙物的場景,3款產品都是優(yōu)先減速,但Model3直接減速至停車,而ES8和P7會同時做出適當?shù)霓D向避讓動作,體驗感較好。
車道線合并的情況下,三者成功率都不高,猜測是受當前感知能力的限制,期待后需的提升。
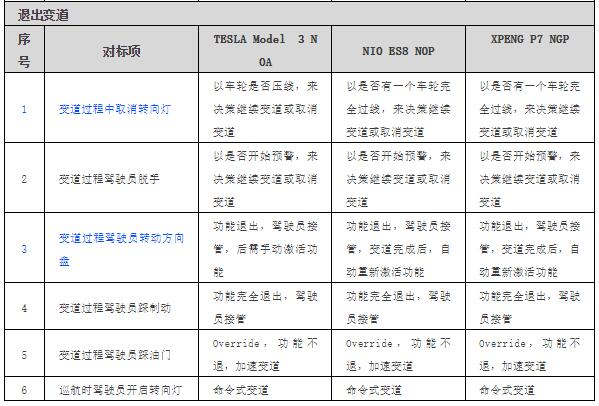
變道過程中如有駕駛員干預,三者的處理方式大同小異,除了駕駛員踩油門的操作外,系統(tǒng)都會退出或暫停功能。不同之處在于退出的時機,以及系統(tǒng)是否自動恢復接管。
表3 變道場景的功能表現(xiàn)(藍色字體是表現(xiàn)不同項)

1.4 功能表現(xiàn)總結
Model 3的感知功能強大,風格激進,安全性偏低,測評時多次出現(xiàn)危險狀況,需人工接管的次數(shù)多。同時特斯拉過于依賴視覺感知的結果,與導航和地圖的融合度低,會出現(xiàn)走錯路的情況。
ES8受限于硬件,感知功能弱,風格偏保守,安全性相對高,但犧牲了通行效率。蔚來的場景感知與導航信息融合度高,不會錯過匝道口等涉及全局路徑規(guī)劃的場景。
P7的感知功能達到特斯拉水平,同時風格偏保守,更符合中國道路場景,兼顧了通行效率和安全性。小鵬的場景感知融合了高精地圖,感知效果更準確。
當前主流的產品仍有改進空間,如收費站場景,目前還不能自動駛出;如可以考慮設置不同的自動駕駛模式,滿足不同駕駛風格消費者的用戶體驗等。
二、人機交互效果
對于三款產品的人機交互效果,我們同樣根據(jù)不同的應用場景進行測評。
表4 人機交互的場景
2.1 功能開啟與激活的操作方式
三款產品的功能開啟方式相同,都通過車機里的軟開關控制,但激活方式各不相同。
Model3完全顛覆了傳統(tǒng)汽車的操作方式,采用撥桿操作;ES8完全保留了傳統(tǒng)的操作方式,采用按鍵操作;P7則采取折中方案,同時采用撥桿和按鍵,控制不同的模塊。
表5 功能開啟與激活方式


圖8 Model3 NOA的開關方式
(圖片來源http://www.cheyun.com/content/12655,https://www.d1ev.com/carnews/pingce/93854)

圖9 ES8 NOP的開關方式
(圖片來源https://www.pcauto.com.cn/qcbj/1511/15110725.html)

圖10 P7 NGP的開關方式
(圖片來源http://baijiahao.baidu.com/s?id=1660603366954782047&wfr=spider&for=pc,http://www.yidianzixun.com/article/0SqFSNEL?s=sd24&appid=s3rd_sd24)
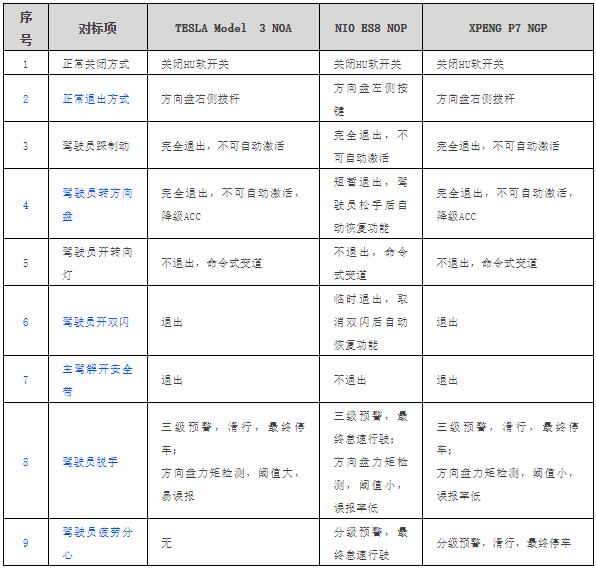
2.2 功能退出與預警的表現(xiàn)
三款產品的正常功能退出方式,與功能開啟激活方式相同。
在駕駛員干預的情況下,對于駕駛員踩制動的處理方式相同,功能退出,車輛交給駕駛員接管;對于駕駛員轉動方向盤的處理方式中,ES8只是暫停功能,根據(jù)駕駛員的轉動時間,決定是否自行恢復功能,Model3和P7都是直接退出功能。
三款產品都采用方向盤力矩檢測的方式來判斷脫手,其中Model3的閾值設定較大,很容易誤報,ES8和P7則表現(xiàn)正常。
Model3由于沒有啟用DMS(駕駛員監(jiān)測系統(tǒng)),因此不能判斷駕駛員是否存在疲勞和分心的情況,ES8和P7則會實時監(jiān)測駕駛員狀態(tài),并分級預警,保證安全。
總體來說,ES8對駕駛員干預的退出機制相對保守,部分條件下可以自動恢復功能,而Model3和P7則直接退出,交由駕駛員接管。
表6 功能退出與預警(藍色字體是表現(xiàn)不同項)
2.3 巡航場景的顯示效果
三款產品的巡航顯示的信息量相似,但效果和風格都不相同。
Model3只在HU顯示NOA的巡航效果,ES8和P7則同時采用儀表和HU分別顯示感知和導航信息,ES8更是把簡化的導航信息放在HUD中顯示,提升了用戶體驗。
Model3的顯示風格簡潔,ES8和P7則給人復雜的感覺,稍微有點眼花繚亂,但ES8和P7都有語音提示,駕駛員可以通過語音了解車輛當前狀態(tài),不需要過多關注屏幕的顯示內容。
ES8在導航中加入了NOP功能的地理圍欄范圍,讓駕駛員更有控制感,這一點值得推薦。
表7 巡航場景的顯示效果(藍色字體是表現(xiàn)不同項)
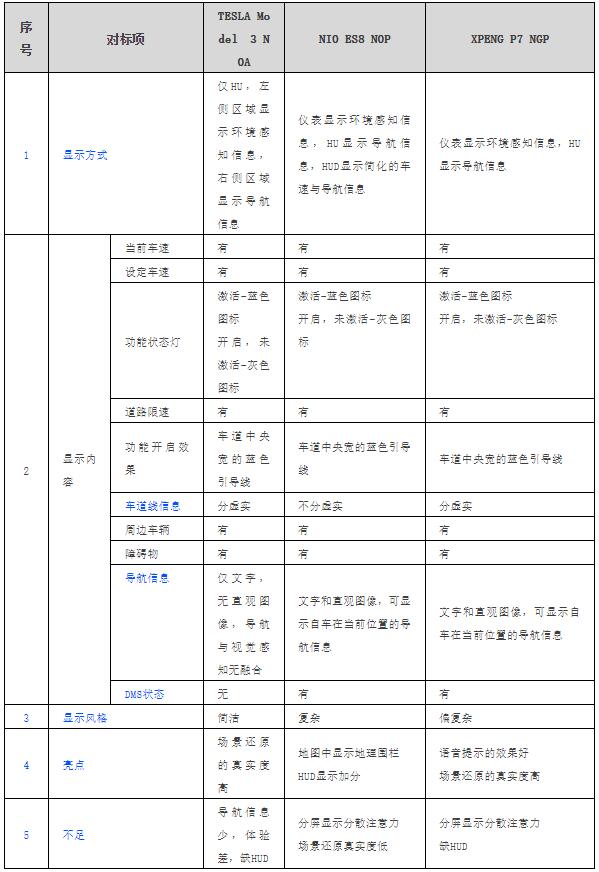

圖11 Model3 NOA的巡航顯示效果

圖12 ES8 NOP的巡航顯示效果

圖13 P7 NGP的巡航顯示效果
(圖片來源https://post.smzdm.com/p/ad22vpkd/,https://www.sohu.com/a/458281678_100101107)
2.4 變道場景的顯示效果
變道場景中,三款產品的顯示內容相似,都會顯示目標車道、目標車位、危險車輛等信息,但風格和效果不相同。
Model3通過方向盤振動提醒駕駛員車輛即將變道,提高了安全性,但顯示效果中缺少變道過程的動態(tài)實時顯示,并且看不出導航變道時匝道的效果。
ES8會通過引導線的方向和彎曲程度,實時顯示變道過程,但是對目標車道的提示不夠明顯,并且缺少振動提醒,好在有語音提示,也能達到提示的效果。
P7對目標車道和變道全過程的顯示效果都不錯,美中不足的是缺少振動提醒,不過語音提示效果也不錯。
表8 變道場景的顯示效果(藍色字體是表現(xiàn)不同項)
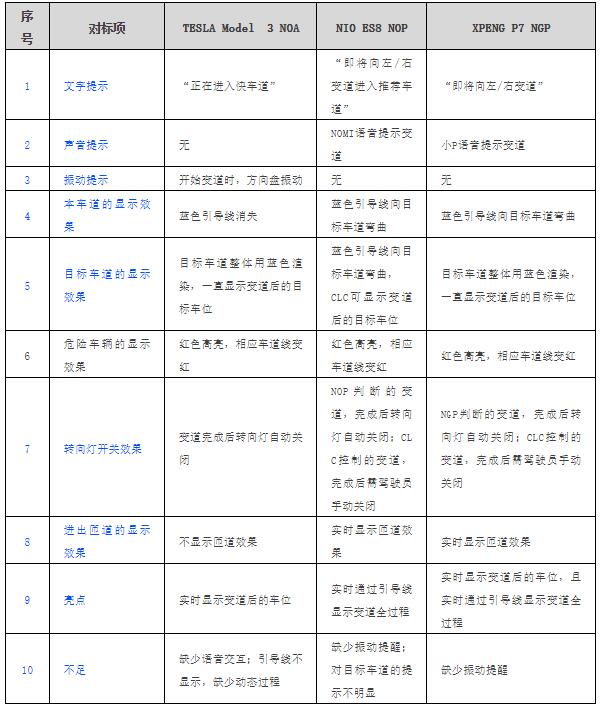
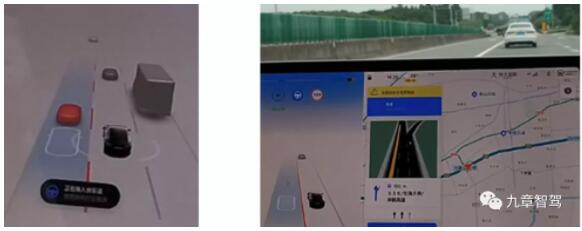
圖14 Model3 NOA的變道顯示效果

圖15 ES8 NOP的變道顯示效果

圖16 P7 NGP的變道顯示效果
(圖片來源https://new.qq.com/rain/a/20210312a04jxk00)
2.5 人機交互總結
Model3人機交互風格簡潔,顯示的信息量少;缺失語音交互,體驗感不好。
ES8人機交互風格相對復雜,顯示的信息量大;ES8的操作以按鍵為主,偏傳統(tǒng);ES8有語音交互和HUD顯示,提升了用戶體驗。
P7人機交互風格偏復雜,顯示信息量大;P7的功能操作方式結合了撥桿和傳統(tǒng)按鍵的方式;P7的顯示風格與ES8接近;P7的語音交互體驗感好。
目前主流產品的人機交互顯示效果已經能顯示主要的道路和障礙物信息,但還不夠完整和真實,相信隨著感知性能和車機性能的提升,顯示效果會逐步提升,達到真正的場景重構效果。
以上,就是我們本次對三款產品的全部測評內容,受道路環(huán)境、法規(guī)和主觀因素的影響,內容準確度難以達到100%,但在一定程度上可以為產品開發(fā)和驗證提供參考。
隨著特斯拉、蔚來、小鵬不斷地推陳出新,以及其他廠家的新產品不斷亮相,相信高級智能駕駛功能會越來越完善,越來越安全。
附:配置與技術演化路線
附1.配置
表9展示的是特斯拉、蔚來、小鵬的智能駕駛硬件配置情況。
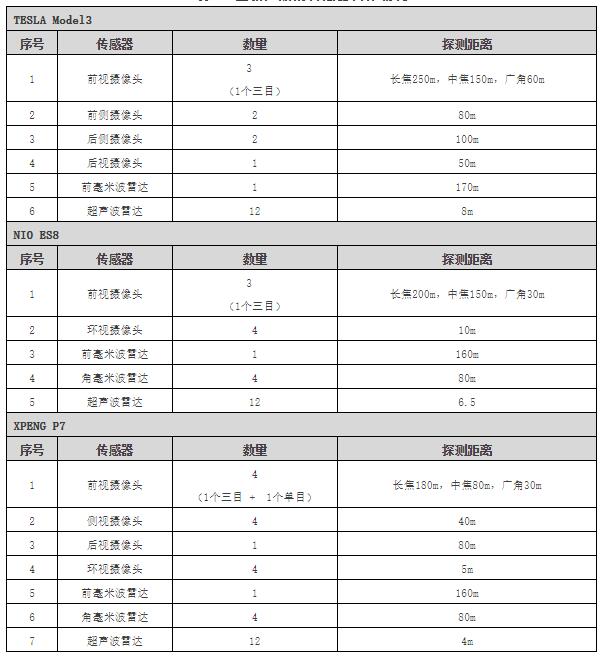
從傳感器來看,Model 3和P7的傳感器配置明顯高于ES8,P7更是采用了13顆攝像頭來做感知融合,在目前的量產產品中,可以說是做到了極致。
至于融合定位,蔚來和小鵬都搭載了主流圖商的高精地圖,與感知結果融合,基于當前的感知技術,效果自然是優(yōu)于特斯拉的純視覺方案(特斯拉的毫米波雷達只是輔助)。
從計算平臺來看,Model 3采用了2塊特斯拉自研的FSD芯片,算力達到144TOPS,算力遠高于ES8和P7,計算速度和效率自然也領先,這也是特斯拉的智能駕駛算法運行的保障。同時,自研的芯片,在開發(fā)的靈活性和適配效果上,也必然優(yōu)于采用供應商芯片的方案。
三者在國內的量產時間接近,特斯拉的價格相對昂貴,這也是部分特斯拉車主沒有安裝FSD功能包的原因吧。
另外,前不久小鵬P5上市,蔚來也在年初發(fā)布了ET7,ET7不僅視覺傳感器的數(shù)量和性能(前視800萬像素)都大幅提升,加入了激光雷達,芯片的算力也達到了奢侈的程度,相信感知效果會有明顯的提升。
表9 硬件配置

圖17~圖22可以看出Model3/ES8/P7的傳感器具體布置方案以及探測范圍,表10對這三款產品的傳感器探測距離作了定量的說明。
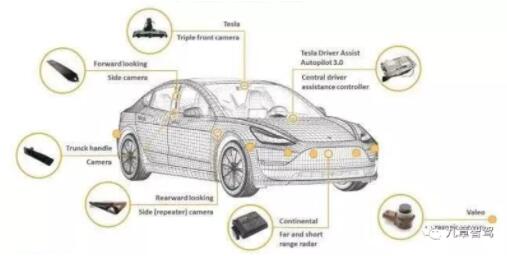
圖17 Model 3的傳感器
(圖片來源https://36kr.com/p/1243708023507971)
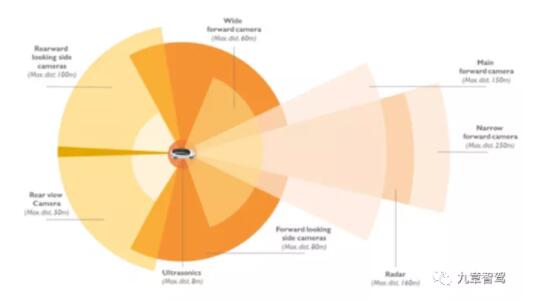
圖18 Model 3的探測范圍
(圖片來源https://news.mydrivers.com/1/697/697355.htmjd)
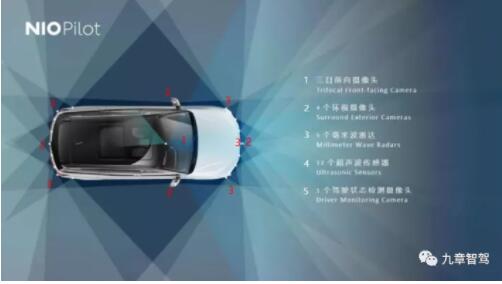
圖19 ES8的傳感器
(圖片來源https://www.sohu.com/a/301101089_256868?referid=001cxzs00020004)

圖20 ES8的探測范圍
(圖片來源https://news.yiche.com/hao/wenzhang/31218425)

圖21 P7的傳感器
(圖片來源https://www.sohu.com/a/439658882_430289)
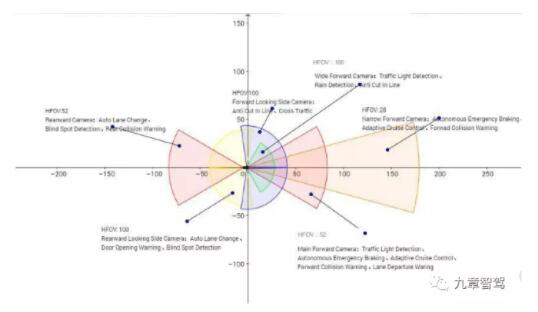
圖22 P7的探測范圍
(圖片來源https://www.sohu.com/na/448526925_268260)
表10 三款產品的傳感器具體情況
附2. 技術演化路線
從三家公司產品的技術演化路線來看,特斯拉起步早,2016年就已經有了NOA功能,后續(xù)從細節(jié)上優(yōu)化升級;蔚來則逐步疊加功能,更像傳統(tǒng)主機廠的風格;小鵬則是后來居上,第二代產品P7的NGP功能,就已經達到了領先水平。

圖23 特斯拉的技術演化路線

圖24 蔚來的技術演化路線

圖25 小鵬的技術演化路線























