哈佛的機器魚學會了智能協作,集體“游”上 Science 子刊封面!
本文轉自雷鋒網,如需轉載請至雷鋒網官網申請授權。
本月的 Science 子刊 Science Robotics(《科學-機器人》)封面,被一群大眼萌機器魚霸占。
這是來自哈佛大學約翰·保爾森工程和應用科學學院、韋斯生物啟發工程研究所的一組科學家的最新研究成果。
機器魚可以像真正的魚群那樣,在沒有任何外部控制的情況下同步運動。
水下仿生機器人的群體智能
2021 年 1 月 13 日,相關成果正式發表于 Science Robotics,論文題為 Implicit coordination for 3D underwater collective behaviors in a fish-inspired robot swarm(受魚群啟發的機器人水下三維集體行為的隱式協調)。

從論文標題就可看出,哈佛科學家們的這項成果主要受到了魚群的啟發。
自然界中,魚群傾向于表現出復雜的、同步的行為,這有助于它們覓食、遷徙、躲避捕食者。它們內部的神奇之處在于,不需要某條“領頭魚”來協調動作,魚群間也不存在交流——它們的集體行為來自于一種所謂的「隱式協調」(implicit coordination)機制,在這種機制下,魚會根據周邊小伙伴的行為做出決定。
據哈佛大學官方介紹:
這種分散的、自主的組織協調,長期以來一直吸引著科學家們,特別是機器人領域的專家。
其實,在水下仿生機器人方面,我國科研人員也在做類似研究,比如北京大學工學院謝廣明教授。在他看來,研究仿生機器人既要注重單體的研發,也要注重群體技術的研發。
在 2018 CCF-GAIR 全球人工智能與機器人峰會期間,謝廣明教授曾表示:
魚群的自主協調并不是因為好玩或是娛樂,唯一的目的是在惡劣、有限的資源環境下生存下去。很多計算機專業的可能都知道粒子群優化算法,而在生物界,通過群體的方式讓整個種群延續下去這種行為是一個很值得研究的問題,即群體智能,群體智能也是人工智能很重要的研究分支。
研究人員用動畫描述了群體智能,形成平面模型,再將其進一步擴展到三維模型。基于此,機器魚也可以擁有類似的群體特性——當時謝廣明教授的團隊已經實現了用三條魚的自主協調效果。
3D 視覺感知
回到哈佛的研究,他們將研制出的水下機器人稱為 Bluebot,它們形成的群體則為 Blueswarm(7 只 Bluebot)。
據了解,Bluebot 結合了自主 3D 多鰭運動和 3D 視覺感知,具體的設計為:
-
2 個攝像機,覆蓋近全向視場角(FOV)。
-
4 個鰭片,由定制的電磁驅動器提供動力:一條尾鰭和兩條胸鰭幾乎可以獨立地向前和轉動,背鰭影響著對垂直潛水深度的控制。
-
3 個 LED 燈,用于相互識別。
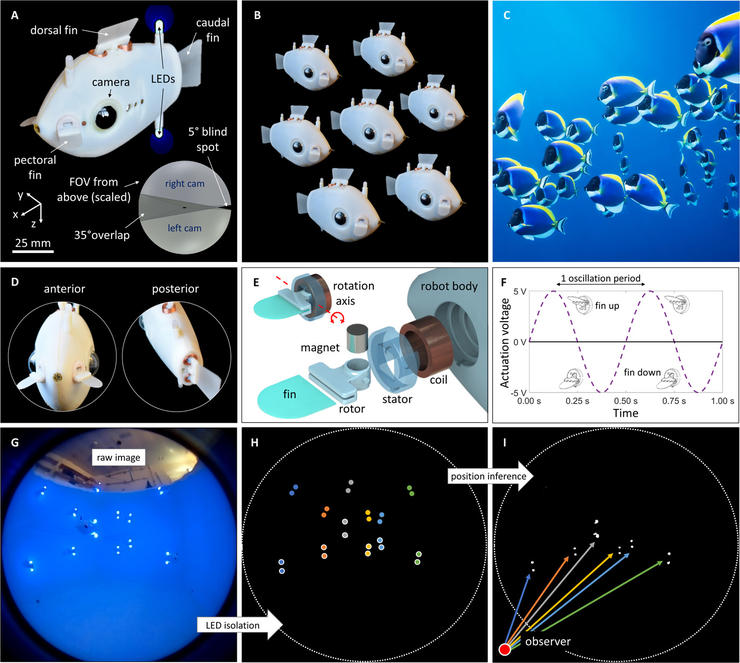
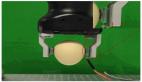
如上圖最下面一行所示,研究人員通過對攝像機的設置,使得相鄰 Bluebot 的兩個后置 LED 及其潛在的表面反射出現在圖像中,并對圖像進行快速處理。不同 Bluebot 的兩個 LED 使用了不同的顏色進行編碼,且有著白色輪廓;如果是同色無輪廓標記的情況,則意味著兩個 Bluebot 在各自反射。
通過這一套水下視覺協調系統,Bluebot 可通過相機檢測到距離最遠為 5 米的相鄰 Bluebot 的 LED 信號,再通過自定義算法提取其相對位置、距離等信息,實現局部決策(local decision-making),促進自組織行為,如視覺同步、分散/聚集、動態形成圓圈和集體搜索等。
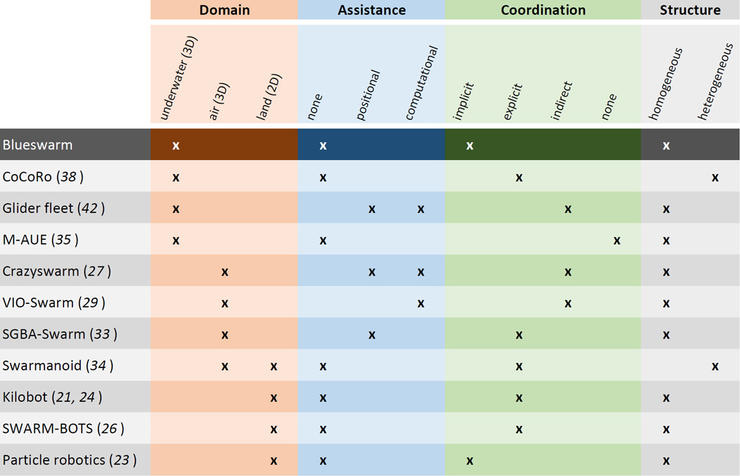
論文中,哈佛團隊將 Blueswarm 與多個研究團隊的群體機器人群體進行了比較,主要的 4 個評判標準是:
-
應用場景(水、陸、空)
-
干預(無干預、位置、計算)
-
協調(隱式、顯式、間接、無協調)
-
結構(同類、異類)
結果表明,Blueswarm 不依賴于任何幫助,且比大多數群體機器人更自主,推動了分散、自組織的群體機器人研究從二維空間到三維空間的突破。
基于上述表現,哈佛大學對這一成果的描述是:
首次在水下機器人中演示具有隱式協調的復雜三維集體行為。(It is the first time researchers have demonstrated complex 3D collective behaviors with implicit coordination in underwater robots. )
論文一作、博士生 Florian Berlinger 也表示:
鑒于機器人常被部署在人類無法進入的或危險的地區,人類干預是不現實的。這種情況下,擁有自給自足的、高度自主的群體機器人,真的會讓我們受益。通過隱式協調和 3D 視覺感知,我們創建的系統解決了在水下無法使用 GPS 和 WiFi 等設備的難題。
研究團隊認為,這項研究將幫助科學家們繼續探索微型水下群體機器人的開發,主要用于執行水下環境(如珊瑚礁)監測和搜索。
未來水下機器人還將如何發展,我們拭目以待。