讓失語者說話,讓癱瘓者行走!腦機接口讓「賽博人類」擁有超能力?
「讓人們看見以前看不到的東西,紅外線,紫外線,無線電……我認為換一種說法就是,我們想給人類超能力。」
在7月10日的一場直播中,馬斯克表示腦機接口的最終目標不僅是修復殘障人士喪失的頭腦功能,還要賦予人類超能力。
2016年,Arbaugh頸部以下癱瘓。1月,他成為第一個通過手術植入馬斯克創立的Neuralink公司制造的芯片的人。
從那時起,阿博就開始用意念操作手機和電腦,上網、玩文明(一款游戲)、下棋。
Neuralink并不是唯一一家利用腦機接口 (BCI) 將人類思維與機器融合在一起的公司,通過一系列試驗,越來越多因脊髓損傷、中風或運動疾病而癱瘓的人正在恢復失去的能力。
加利福尼亞州斯坦福大學的神經外科醫生Jaimie Henderson表示,手術地成功讓許多研究人員都感到驚訝。「這是一段令人難以置信的新旅程。」
但新科技會將我們帶向何方還有待觀察。馬斯克最近考慮制造一種仿生植入物,讓人類能夠與超級人工智能競爭。
「未來,你可以操縱人類的感知、記憶、行為和身份,」紐約哥倫比亞大學的Rafael Yuste說。
人機融合的植入技術聽起來固然強大而誘人,但也將面臨諸多挑戰。
腦機接口
腦機接口的工作原理是首先使用金屬盤、電線或電極檢測來自神經元的電信號,這些設備要么插入大腦、顱骨下方,要么放置在頭皮上。
 圖片
圖片
然后,這些信息被發送到計算機進行處理并翻譯成命令。例如,讓人能夠輸入句子或控制機器人設備。
幾十年來,科學家一直以這種方式從大腦中獲取數據。1998年,研究人員將第一個由兩個電極組成的侵入式腦機接口植入到一位名叫Johnny Ray的建筑工人的大腦中,他在中風后幾乎完全癱瘓。
Ray學會了如何通過想象用手移動光標、控制鍵盤上的字母,來調整發送給植入物的信號,從而能夠緩慢地拼寫單詞。
但這種早期腦機接口的功能和可靠性都很差,通常這些設備需要經過數周或數月的調試才能使用。
即便如此,這種設備也只允許人們每分鐘選擇幾個字符,并且很容易出錯。
其中一個要解決的問題就是,僅由幾個電極制成的設備,根本無法收集足夠的數據。
人腦中有數十億個錯綜復雜連接的神經元,研究已經表明,是神經元組(而不是單個細胞)的活動模式決定了我們的思想、行動和感知。
為了能夠解碼數以億計的神經元模式,BCI 研究人員希望測試和部署能夠同時拾取許多神經元信號的技術。
為了實現這一目標,他們開始致力于采用由猶他大學Richard Normann發明的一項技術,通過刺激大腦視覺皮層來恢復視力。
Normann的4毫米見方的芯片被稱為「猶他陣列」(Utah array),上面布滿了大約100個可以穿透大腦外層的微電極。
 圖片
圖片
該陣列經過重新設計,可以跟蹤單個神經元的放電,每個陣列可以同時記錄大約100個神經元的數據。
羅德島州布朗大學的Carlos Vargas-Irwin說,「這使我們能夠觀察神經元群并看到真正豐富的信號。」
從2000年還是一名大學生時,他就開始研究Utah Arrays。這些神經元群的集體輸出代表大腦的語言,指導諸如伸手、書寫、行走、說話、微笑和思考等功能。
與癱瘓患者設備最相關的信號位于運動皮層,這是一條像頭帶一樣纏繞在大腦頂部的組織,負責計劃和執行運動。
它大致的分布與身體部位組織對應。比如,在它的面部區域,有控制面部肌肉的神經元,在腿部區域,有操作腿部的神經元,等等。
BCI 研究人員經常將電極放置在手部區域,因為人們往往會發現很容易想象移動雙手來做有用的事情,例如打字,或操作操縱桿、機械臂。
2004年,BCI 聯盟BrainGate的研究人員報告稱,可以將Utah陣列植入癱瘓患者體內。
人們紛紛自愿接受腦部手術,推動了這一領域的發展。
一名因刀傷而上下半身癱瘓的男子用意念引導光標,打開模擬電子郵件、操作電視,以及打開和關閉假手。
兩個中風后癱瘓的人通過「心靈感應」操縱機械臂來夠到并抓取物體;其中一個人喝了一瓶咖啡。
一名因肌萎縮側索硬化癥(一種神經退行性的癱瘓疾病)而導致肌肉無力的女性將光標指向屏幕上的最多八個目標。
「每次我們進行此類手術并與參與者合作時,都會學到很多東西,」Henderson說,他是BrainGate的成員,也是Neuralink的顧問,擁有Neuralink的股權。
Yuste表示,在過去的幾年里,將大腦活動轉化為運動甚至語音的設備能力水平突飛猛進。
借助越來越強大的算法,研究人員可以從神經元組中破譯日益復雜的活動模式的含義。
據報道,Dennis DeGray于2021年創下了用Utah Arrays實現的虛擬打字速度新紀錄——每分鐘90個字符。
 圖片
圖片
DeGray通過想象自己在便箋簿上書寫來打字,他的大腦為此發出了所需的精細、多關節運動的信號。
然后,人工智能工具對這個想象的筆跡的神經信號進行解碼,并將其映射到單個字母。
同樣,在未發表的工作中,Vargas-Irwin和他的同事表示,他們已經找出了數十種手勢以及同時涉及雙手的單個手指運動的大腦「代碼」。
在Vargas-Irwin于2022年發表的研究中,一名頸部以下癱瘓的男子植入了兩個Utah Array,通過想象移動任意一只手上的特定手指來彈奏一架有10個琴鍵的鋼琴。
Vargas-Irwin說,雖然他目前還不能演奏較為復雜的曲譜,「但這已經證明了他們可以獨立控制每個手指。」
最令人震驚的發展之一是腦機接口的出現,它可以使癱瘓的肢體重新行動。
去年,洛桑瑞士聯邦理工學院的Grégoire Courtine和他的團隊報告稱,他們發現了一種侵入性較小的「皮質電圖描記」(ECOG)陣列。
 圖片
圖片
該陣列位于運動皮層腿部區域上方的頭骨下方,不穿透腦組織,并與人工智能一起進行閱讀大腦中的信號并將其轉發到脊髓中的刺激器。
這使得雙腿癱瘓的Gert-Jan Oskam能夠站立和行走,甚至可以走樓梯和不平坦的地形。「我們建立了一座將想法轉化為行動的數字橋梁,」Courtine說。
此外,人工智能識別的活動模式正在挑戰我們對大腦的理解。
在更基礎的層面上,腦機接口研究表明,運動皮層細胞群的管轄范圍超出了單個身體部位,擴展到多個關節和多個身體部位。
研究發現,盡管DeGray的陣列被放置在運動皮層的「手部區域」,但它也可以拾取產生語音所需的運動模式。
Henderson說,「我們讓他說話,令我們大吃一驚的是,我們認為大腦中一個專門負責手功能的區域出現了非常強烈的音節信號。」
這一發現和其他發現使人們對負責協調行動的大腦區域有了更細致的了解。運動皮層神經元不像心臟病專家那樣專注于身體的某個部位,而似乎更像是具有亞專業的全科醫生。
「即使在一小塊運動皮層中,你也可以獲得一些有關整個身體正在做什么的信息——比如手臂、腿、臉、舌頭。所有這些信息都有回聲,」Vargas-Irwin說。這表明運動皮層是根據復雜的概念(例如動作)而不是身體部位來組織的。
解碼思想
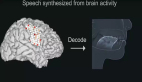
據報道,去年,一位名叫Ann Johnson的婦女在中風后喪失了說話能力,她利用腦皮層成像庫列在Johnson附近的電腦上操作一個化身以每分鐘78個單詞的速度替她發生。
 圖片
圖片
該化身的人工智能聲音是根據Johnson中風前的聲音錄音訓練而成的,并能做出棚栩如生的嘴部動作。
每當Johnson嘗試做出與這些情緒相關的面部表情時,它還能根據陣列的讀數顯示出快樂、悲傷或驚訝等面部表情。加州大學舊金山分校的神經外科醫生Edward Chang領導了這項研究。
Henderson的團隊等人正試圖解碼將這種虛無縹緲的交流,以此了解思想是如何變成交流語言的。
Henderson說,「我們可以開始了解概念信息是如何在整個大腦中表現出來的。有朝一日,這種理解可能會帶來一些設備,讓中風后有想法卻無法用語言表達的人恢復語言能力。這也更接近于真正讀懂一個人的思想。」
工程方面的挑戰仍然困擾著這一領域。像Utah和Neuralink陣列這樣的腦嵌入式設備可以更精確地捕捉大腦活動,但隨著時間的推移,信號質量可能會下降。
與此同時,一些BCI裝置涉及的電線從端口處伸出,存在持續感染的風險,而且大多數裝置最終都必須拆除或更換。
撒開這些麻煩不談,要真正實現馬斯克設想的人腦與機器的融合,將需要一個雙向信息流,既能從「大腦的各個方面」讀取信息,也能向「大腦的各個方面」寫入信息。
這方面已經取得了逐步進展。2021年,一項研究報告稱,一名脊髓損傷的男子在電極刺激其大腦感覺區域的同時,用意念指揮機器人拾取物品并將其放置在平臺上。
倫敦帝國理工學院的Juan Alvaro Gallego說,但這與植入記憶等技能的視覺效果還有很大距離。「記住小時候早餐吃的松餅的口感與感覺到有人在揉搓你的大拇指是不同的。」我們不知道如何將記憶或知識寫入大腦。
此外,實驗性 BCI無法在不同的活動之間快速切換,而這些活動占據了大多數人的日常生活,例如一會兒打字,一會兒和朋友聊天,一會兒又去廚房吃零食。
Gallego表示,「我們無法建立一個模型,在日常生活的所有這些活動中都能發揮作用。」
通用植入體
為了朝這個方向邁出第一步,他和他的同事們已經找到了一種方法,可以讓單個任務的編程變得更容易。
目前,BCI是為每個參與者個性化設計的,但Gallego的團隊創造出了一種通用解碼器,至少在猴子和小鼠的不同大腦中都能工作。
它是通過追蹤神經元群中出現的跨物種共享模式來實現這一點的。例如,「你可以在動物1中建立一個模型,預測動物1是如何移動它的手的,并將其用于動物 2。」
如果這種算法也能在不同的人腦中發揮作用,那么它就能為更多功能的BCI鋪平道路。
諸如此類的進步不斷縮小我們的精神世界與產生這些世界的神經活動之間的鴻溝。
Neuralink與Synchron和Blackrock Neurotech(生產Utah Arrays)等類似公司一樣,經常被視為實現這一目標的合作伙伴。
但是,真正實現人機融合的目標仍道阻且長,完全通用植入體也暫未出現清晰的實現方法。