還在YOLO-World?DetCLIPv3出手!性能大幅度超出一眾SOTA!
本文經自動駕駛之心公眾號授權轉載,轉載請聯系出處。

現有的開詞匯目標檢測器通常需要用戶預設一組類別,這大大限制了它們的應用場景。在本文中,作者介紹了DetCLIPv3,這是一種高性能檢測器,不僅在開詞匯目標檢測方面表現出色,同時還能為檢測到的目標生成分層標簽。
DetCLIPv3的特點有三個核心設計:
- 多功能的模型架構:作者導出一個健壯的開集檢測框架,并通過集成字幕 Head 進一步賦予其生成能力。
- 高信息密度數據:作者開發了一個自動標注 Pipeline ,利用視覺大型語言模型來細化大規模圖像-文本對中的字幕,為訓練提供豐富、多粒度的目標標簽以增強訓練。
- 高效的訓練策略:作者采用了一個預訓練階段,使用低分辨率輸入,使目標字幕生成器能夠從廣泛的圖像-文本配對數據中高效學習廣泛的視覺概念。
在預訓練之后是一個微調階段,利用少量高分辨率樣本進一步提高檢測性能。借助這些有效的設計,DetCLIPv3展示了卓越的開詞匯檢測性能,例如,作者的Swin-T Backbone 模型在LVIS minival基準上取得了顯著的47.0零樣本固定AP,分別優于GLIPv2、GroundingDINO和DetCLIPv2 18.0/19.6/6.6 AP。DetCLIPv3在VG數據集上的密集字幕任務也取得了先進的19.7 AP,展示了其強大的生成能力。
1 Introduction
在開放詞匯目標檢測(OVD)領域的近期進展已經實現了識別和定位多種不同目標的能力。然而,這些模型在推理過程中依賴于預定義的目標類別列表,這限制了它們在實際場景中的應用。
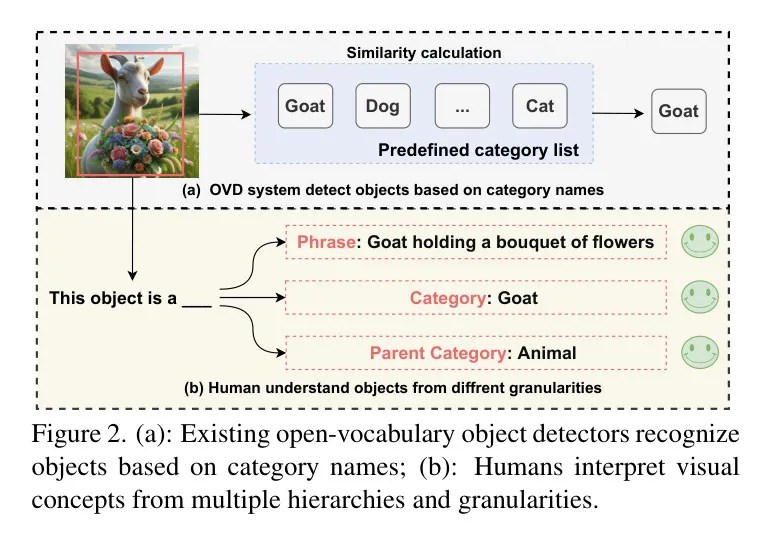
與目前僅基于類別名稱識別物體的開放詞匯目標檢測(OVD)方法相比,人類認知展現出了更多的靈活性。如圖2所示,人類能夠以層次化的方式,從不同的粒度理解物體。這種多級識別能力展示了人類豐富的視覺理解能力,這是現代OVD系統尚未達到的。
為了解決上述限制,作者引入了DetCLIPv3,這是一種新型的目標檢測器,它擴展了開放詞匯目標檢測的范圍。DetCLIPv3不僅能夠根據提供的類別名稱識別物體,還能夠為每個檢測到的物體生成層次化的標簽。這一特性具有兩個優點:1) 由于其卓越的生成能力,即使在沒有適當的輸入物體類別的情況下,檢測器仍然適用;2) 模型能夠提供關于物體的全面且分層的描述,而不僅僅是基于給定類別進行識別。具體來說,DetCLIPv3具有三個核心設計特點:
多功能的模型架構: DetCLIPv3基于一個健壯的開詞匯(OV)檢測器,并且進一步通過一個物體描述器增強了其生成能力。具體來說,物體描述器利用OV檢測器提供的foreground proposals(前景 Proposal ),并通過語言建模訓練目標來訓練生成每個檢測到的物體的分層標簽。這種設計不僅允許精確的定位,還能提供視覺概念的詳細描述,從而為視覺內容提供更豐富的解釋。
高信息密度數據: 發展強大的生成能力需要豐富的訓練數據,這些數據需充實了詳細的物體 Level 描述。這樣全面的數據庫稀缺(例如,Visual Genome [25])成為了訓練有效物體描述生成器的重大障礙。另一方面,盡管大規模的圖像-文本配對數據很豐富,但它們缺乏對每個物體的細粒度標注。為了利用這些數據,作者設計了一個自動標注管線,利用最先進的視覺大型語言模型[7, 35],該模型能夠提供包含豐富層次化物體標簽的精細圖像描述。通過這個管線,作者得到了一個大規模的數據集(稱為GranuCap50M),以增強DetCLIPv3在檢測和生成方面的能力。
高效的多階段訓練: 與高分辨率輸入相關的目標檢測訓練成本高昂,這對從大量的圖像-文本對中學習構成了重大障礙。為了解決這個問題,作者提出了一種高效的多階段對齊訓練策略。這種方法首先利用大規模、低分辨率的圖像-文本數據集的知識,然后在高質量、細粒度、高分辨率的 數據上進行微調。這種方法確保了全面的視覺概念學習,同時保持了可管理的訓練需求。
通過有效的設計,DetCLIPv3在檢測和目標 Level 的生成能力上表現出色,例如,采用Swin-T Backbone 網絡,在LVIS minival基準測試中取得了顯著的47.0零樣本固定AP[9],明顯優于先前的模型如GLIPv2[65],DetCLIPv2[60]和GroundingDINO[36]。此外,它在密集字幕任務上達到18.4 mAP,比先前的SOTA方法GRiT[56]高出2.9 mAP。廣泛的實驗進一步證明了DetCLIPv3在領域泛化及下游遷移能力方面的優越性。
2 Related works
開放詞匯目標檢測。 近期在開放詞匯目標檢測(OVD)方面的進展使得可以識別無限范圍類別的目標,如文獻[16, 17, 57, 63, 69]所示。這些方法通過將預訓練的視覺-語言模型,例如CLIP [46],整合到檢測器中來實現OVD。另外,擴大檢測訓練數據集也顯示出潛力[24, 29, 31, 36, 58, 60, 65, 70],這些方法結合了來自各種任務(如分類和視覺定位)的數據集。此外,偽標簽已經作為增強訓練數據集的另一種有效策略出現,如文獻[15, 29, 43, 58, 68, 69]所示。然而,先前的OVD方法仍然需要一個預定義的目標類別進行檢測,這限制了它們在多樣化場景中的適用性。相比之下,作者的DetCLIPv3即使在沒有類別名稱的情況下也能夠生成豐富的分層目標標簽。
密集字幕生成。 密集字幕生成旨在為特定圖像區域生成描述[23, 28, 30, 51, 61]。最近,CapDet [38] 和 GRiT [56] 都通過引入一個字幕生成器,為目標檢測器配備了生成能力。然而,由于訓練數據稀缺,例如 Visual Genome [25] 中包含的數據,它們只能為有限的視覺概念生成描述。相比之下,作者利用大規模圖像-文本對中的豐富知識,使模型能夠為更廣泛的概念譜生成分層標簽信息。
圖像-文本對的重新描述。 近期研究 [5, 26, 44, 62] 強調了當前圖像-文本對數據中存在的問題,并已表明重新描述的高質量圖像-文本對可以顯著提高各種視覺任務的學習效率,例如文本到圖像生成 [5, 44],圖像-文本檢索 [26, 27] 和圖像標注 [26, 62]。作者將這一想法擴展到開放詞匯目標檢測,并探索如何有效地利用圖像-文本對中包含的目標實體信息。
3 Method
在本節中,作者介紹了DetCLIPv3的核心設計,包括:(1)模型架構(第3.1節)—闡述作者的模型如何實現開詞匯目標檢測及生成目標描述;(2)自動標注數據流程(第3.2節)—詳細說明作者策劃大規模、高質量的圖像-文本對的方法,涵蓋不同粒度層面的目標信息;(3)訓練策略(第3.3節)—概述作者如何有效地利用大規模圖像-文本數據集來促進目標概念的生成,進而提升開詞匯檢測的能力。
Model Design
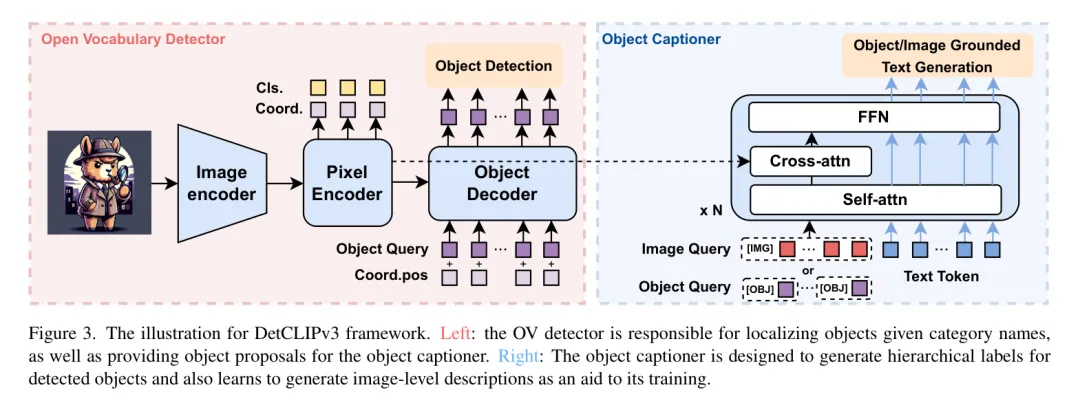
圖3展示了DetCLIPv3的整體框架。本質上,該模型基于一個強大的開放詞匯目標檢測器,并配備了一個專門用于生成分層和描述性目標概念的目標標題生成器。該模型能夠在兩種模式下運行:1) 當提供一個預定義的類別詞匯表時,DetCLIPv3預測列表中提到的物體的定位;2) 在沒有詞匯表的情況下,DetCLIPv3能夠定位物體并為每一個物體生成分層描述。
數據制定。 DetCLIPv3的訓練利用了來自多個來源的數據集,包括檢測[50, 55]、定位[24]以及圖像-文本對[4, 48, 52, 53],并帶有邊界框偽標簽(具體見第3.2節)。與DetCLIPv1/v2[58, 60]一樣,作者采用一種_平行制定_方法將來自不同數據源的文本輸入統一為一種標準格式。具體來說,每個輸入樣本結構化為一個三元組,,其中是輸入圖像,表示一組邊界框,而則表示一組概念文本,包括正負概念。
對于檢測數據, 包括類別名稱及其定義(如 [58, 60] 中所述),適用于訓練和測試階段。負概念是從數據集中的類別中抽取的。對于接地(grounding)和圖像-文本對數據,正概念是目標描述,而負概念則從大規模名詞語料庫中抽取(具體見第3.2節)。在訓練期間,為了增加負概念的數量,作者從所有訓練節點收集它們,并執行去重處理。
開放詞匯檢測器。 作者提出了一種緊湊但功能強大的檢測器架構,用于DetCLIPv3,如圖3中紅色框所示。具體來說,它是一個雙路徑模型,包括一個視覺目標檢測器 和一個文本編碼器 。視覺目標檢測器采用基于 Transformer 的檢測架構[3, 66, 71],由一個 Backbone 網絡、一個像素編碼器和一個目標解碼器組成。Backbone 網絡和像素編碼器負責提取視覺特征,進行細粒度特征融合,并為解碼器提出候選目標 Query 。類似于GroundingDINO [36],作者利用文本特征根據相似性選擇前k個像素特征,并后來使用它們的坐標預測來初始化解碼器目標 Query 的位置部分。然而,與眾不同的是,作者放棄了在[36]中設計的計算密集型跨模態融合模塊。遵循先前的DETR-like檢測器[3, 66, 71],作者的訓練損失由三個組成部分構成:,其中 是區域視覺特征與文本概念之間的對比焦損失[34],而 和 分別是L1損失和GIOU[47]損失。為了提升性能,在解碼器的每一層以及編碼器的輸出上采用了輔助損失。
目標描述器。 目標描述器使DetCLIPV3能夠為物體生成詳細和分層的標簽。為了獲取圖像-文本對中包含的豐富知識,作者在訓練過程中進一步結合了圖像級字幕目標以增強生成能力。如圖3中藍色框所示,目標描述器的設計受到Qformer [27]的啟發。具體來說,它采用了一種基于多模態Transformer的架構,其交叉注意力層被替換為為密集預測任務定制的可變形注意力[71]。描述器的輸入包括視覺(物體或圖像) Query 和文本標記。視覺 Query 通過交叉注意力與像素編碼器的特征交互,而自注意力層和FFN層在不同模態之間共享。此外,采用了多模態因果自注意力 Mask [11, 27]來控制視覺 Query 與文本標記之間的交互。描述器的訓練由傳統的語言建模損失 指導,對于物體級和圖像級生成具有不同的輸入格式:
目標級生成。目標 Query 以及可變形交叉注意力所需的參考點,都來源于目標解碼器最終層的輸出。輸入結構為:$,其中\texttt{[OBJ]}$是一個特殊的任務 Token ,表示目標生成任務。在訓練期間,作者使用與 GT 情況相匹配的正 Query 來計算損失。在推理過程中,為了獲得前景 Proposal ,作者根據它們與作者精選名詞語料庫(第3.2節)中最頻繁的15K名詞概念的相似性,選擇前k個候選目標 Query 。在為這些目標生成分層標簽后,作者使用OV檢測器重新校準它們的目標性得分,計算目標 Query 與它們生成的'短語'和'類別'字段之間的相似性。這2個相似性中較高的一個被采納作為目標性得分。
圖像級生成。受到Qformer [27]的啟發,作者初始化了32個可學習的圖像 Query ,并使用一組固定的參考點。具體來說,作者從像素編碼器的參考點等間隔地采樣了32個位置。與目標級生成類似,輸入結構為 $</imagequery,$$\texttt{[img]},text></imagequery,$$\texttt{[img]},text></imagequery,$$\texttt{[img]},text></imagequery,$$\texttt{[img]},text></imagequery,$$\texttt{[img]},text></imagequery,$$\texttt{[img]},text></imagequery,$$\texttt{[img]},text></imagequery,$$\texttt{[img]},text></imagequery,$$\texttt{[img]},text></imagequery,$$\texttt{[img]},text></imagequery,$$\texttt{[img]},text></imagequery,$$\texttt{[img]},text></imagequery,$$\texttt{[img]},text></imagequery,$$\texttt{[img]},text></imagequery,$$\texttt{[img]},text></imagequery,$$\texttt{[img]},text></imagequery,$$\texttt{[img]},text></imagequery,$$\texttt{[img]},text></imagequery,$$\texttt{[img]},text></imagequery,$$\texttt{[img]},text>,其中\texttt{[IMG]}$ 是一個特殊的任務標記,表示圖像生成。圖像級生成的推理過程與訓練是一致的。</imagequery,$$\texttt{[img]},text>
Dataset Construction
自動標注數據 Pipeline 。利用大量成本效益高的圖像-文本對進行視覺概念學習,對于提高開放詞匯目標檢測器的一般化能力至關重要。然而,現有的圖像-文本對數據集存在重大缺陷,這些缺陷阻礙了它們在OVD中的實用性,如圖4所示:(1) 錯位:互聯網來源的圖像-文本對數據經常包含大量噪聲。即使使用CLIP [46]基于分數的過濾[48, 49],許多文本仍然無法準確描述圖像的內容,如圖4的第二和第三張圖像所示。(2) 部分標注:大部分文本只描述圖像中的主要目標,導致目標信息稀疏,因此,損害了OVD系統的學習效率,如圖1所示。(3) 實體提取挑戰:先前的工作[24, 32, 43, 60]主要使用傳統的NLP解析器,如NLTK [1, 42]或SpaCy [21],從圖像-文本對中提取名詞概念。它們的有限能力可能導致名詞與圖像內容對齊不良,如圖4的第二行所示。這種不匹配為后續的學習過程或偽標簽工作流程帶來了進一步的復雜性。


一個理想的圖像-文本對數據集對于視覺描述(OVD)應當包含對圖像的準確和全面的描述,提供從詳細到粗略不同粒度 Level 的圖像中目標的信息。基于這種啟發,作者 Proposal 使用視覺大型語言模型(VLLM)[7, 35]來開發一個自動標注流水線,以提高數據質量。VLLM具有感知圖像內容的能力,以及強大的語言技能,使它們能夠生成精確和詳細的標題以及目標描述。
使用VLLM重制標題:作者從常用的數據集[4, 52, 53]中抽取了24萬張圖像-文本對,并使用InstructBLIP [7]模型進行了重制標題。為了利用原始標題中的信息,作者將其融入作者的提示設計中,結構如下:_"給定圖像的一個含噪聲的標題:{原始標題},撰寫一幅圖像的詳細清晰描述。"_。這種方法有效地提升了標題文本的質量,同時保持了原始標題中名詞概念的多樣性。
使用GPT-4的實體提取:作者利用GPT-4[45]卓越的語言能力來處理精致標題中的實體信息。具體來說,首先用它過濾掉VLLM生成的標題中非實體的描述,比如對圖像的氛圍或藝術性解讀。隨后,它負責從標題中提取出現的物體實體。每個實體都被格式化為一個三元組:{短語,類別,父類別},分別表示物體描述在三個不同粒度 Level 上。
對VLLM進行大規模標注的指令調整:考慮到GPT-4 API的高昂成本,將其用于大規模數據集生成是不切實際的。作為一種解決方案,作者在LLaVA [35]模型上執行進一步的指令調整階段,利用之前步驟獲得的改進的標題和目標實體。然后,這個微調后的模型被用來為包含200M圖像-文本對的大型數據集生成標題和實體信息,這些樣本取自CC15M [4, 52],YFCC[53] 和 LAION [48]。
邊界框自動標記:為了自動推導出圖像-文本配對數據中的邊界框標注,作者應用一個預訓練的開詞匯目標檢測器(第3.3節)來分配偽邊界框標簽,給定從前一步驟中得出的目標實體。當提供來自VLLM的準確候選目標實體時,檢測器的準確性可以大大提高。具體來說,作者將 '短語' 和 '類別' 字段作為檢測器的文本輸入,并使用預定義的分數閾值來過濾結果邊界框。如果這兩個字段中的任何一個匹配,作者會為該目標分配整個實體 {短語, 類別, 父類別}。在使用預定義的置信度閾值過濾后,大約有5000萬個數據被采樣用于后續訓練,作者將其稱為 GranuCap50M。在訓練檢測器時,作者使用 '短語' 和 '類別' 字段作為文本標簽;而在訓練目標描述器時,作者將三個字段 - '短語' 類別' 父類別'
無概念語料庫。 與DetCLIP [58]相似,作者利用提取的目標實體的信息開發了一個名詞概念語料庫。這個語料庫主要旨在為GT和圖像-文本對數據(第3.1節)提供負概念。具體來說,作者從20億個重新配文的數據中收集實體的_'category'_字段。在頻率分析之后,總頻率低于10的概念被省略。DetCLIPv3的名詞概念語料庫由792k名詞概念組成,幾乎是DetCLIP中構建的14k概念的57倍擴展。
Multi-stage Training Scheme
學習生成多樣化的物體描述需要在大型數據集上進行廣泛的訓練。然而,像目標檢測這樣的密集預測任務需要高分辨率輸入才能有效處理不同物體之間的尺度變化。這大大提高了計算成本,給擴大訓練規模帶來了挑戰。為了緩解這個問題,作者開發了一個基于“預訓練+微調”范式的訓練策略來優化訓練成本,具體來說,它包括以下3個步驟:
訓練OV檢測器(第一階段):在初始階段,作者用標注的數據集來訓練OV檢測器,即Objects365 [50],V3Det[55]和GoldG [24]。為了使模型在后續訓練階段能夠從低分辨率輸入中學習,作者對訓練數據應用了大規模抖動增強。此外,在這一階段開發的具有Swin-L Backbone 網絡的模型被用來為圖像-文本對生成偽邊界框,具體如第3.2節所述。
預訓練目標描述生成器(階段2):為了使目標描述生成器能夠生成多樣化的目標描述,作者使用GranuCap50M對其進行預訓練。為了提高這個訓練階段的效率,作者凍結了OV檢測器所有的參數,包括 Backbone 網絡、像素編碼器和目標解碼器,并采用了較低的輸入分辨率320×320。這種策略使得描述生成器能夠從大規模的圖像-文本對中有效地獲取視覺概念知識。
整體微調(階段3):這一階段旨在使字幕生成器適應高分辨率輸入,同時提高 OV 檢測器的性能。具體來說,作者從 GranuCap50M 中均勻抽取了60萬個樣本。這些樣本以及檢測和定位數據集一起用來進一步微調模型。在此階段,釋放所有參數以最大化有效性,訓練目標設置為檢測和字幕生成損失的組合,即 。字幕生成器的監督僅來自使用作者的自動標注 Pipeline 構建的數據集,而所有數據都用于 OV 檢測器的訓練。由于檢測器和字幕生成器都已進行預訓練,因此模型可以在幾個周期內有效適應。
4 Experiments
訓練細節。 作者使用Swin-T和Swin-L [37] 主干網絡訓練了2個模型。目標檢測器的訓練設置主要遵循DetCLIPv2 [60]。作者分別使用32/64塊V100 GPU來訓練基于swin-T/L的模型。三個階段的訓練周期分別為12、3和5。對于使用Swin-T主干網絡的模型,這些階段的相應訓練時間總計為54、56和35小時。有關其他訓練細節,請參閱附錄。
Zero-Shot Open-Vocabulary Object Detection
遵循之前的工作[29, 43, 58, 60, 65],作者用1203類LVIS[18]數據集上的零樣本性能來評估作者模型的開放詞匯能力。作者報告了在val(LVIS)和mini-val[24](LVIS)分割上的固定AP[9]性能。在這個實驗中,作者僅使用了模型的OV檢測器組件,并將數據集的類別名稱作為輸入。
表1展示了作者的方法與現有方法的比較。DetCLIPv3顯著優于其他方法,展現了卓越的開詞匯目標檢測能力。例如,在LVIS小型驗證集上,采用Swin-T(第8行)和Swin-L(第15行) Backbone 網絡的作者的模型分別達到47.0和48.8的AP,分別比之前的最先進方法DetCLIPv2提高了6.6(第7行)和4.1 AP(第14行)。值得注意的是,作者的Swin-L模型在稀有類別上的性能(49.9 AP)甚至超過了在基礎類別上的性能(頻繁類別中為47.8 AP,普通類別中為49.7 AP)。這表明,使用高質量圖像-文本對的全面預訓練大大增強了模型識別各種視覺概念的能力,導致在長尾分布數據上的檢測能力顯著提升。

Evaluation of Object Captioner
作者采用了2個任務來評估作者的物體描述生成器,即零樣本生成式目標檢測和密集標注。
零樣本生成目標檢測。 作者在COCO [33] 數據集上進行了零樣本目標級標簽生成,使用的推理過程是第3.1節中描述的,并評估了其檢測性能。然而,這種評估由于兩個關鍵因素而具有重大挑戰:(1) 缺乏預定義的類別用于前景選擇,導致檢測器提出的前景區域與數據集的目標模式之間存在不一致。(2) 生成結果可以是任何任意的詞匯,這可能與數據集中指定的類別名稱不匹配。為了緩解這些問題,作者引入了多種后處理技術。具體來說,作者使用生成的標簽中的“類別”字段作為目標的類別。為了解決第(2)個問題,在評估過程中,作者使用評估模型的文本編碼器計算生成類別與COCO類別名稱之間的相似性,并用最佳匹配的COCO類別替換生成的目標類別。為了解決第(1)個問題,作者進一步過濾掉相似度得分低于預定義閾值0.7的目標。
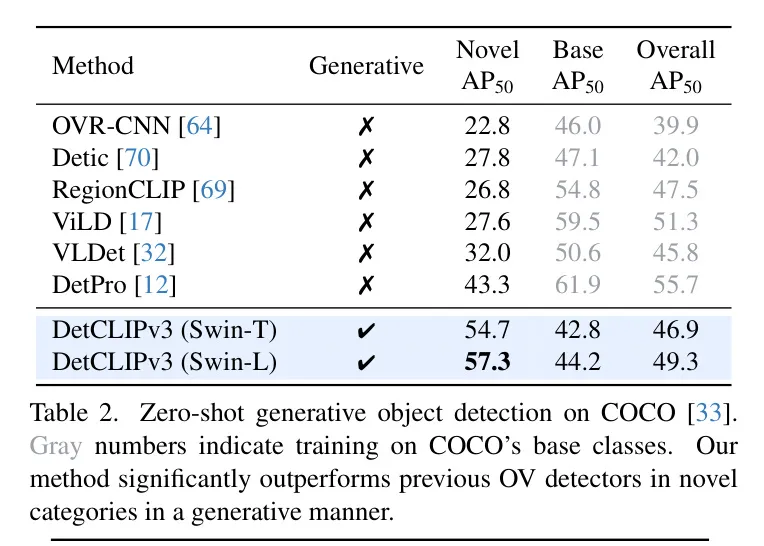
為了與現有方法進行比較,作者采用了在OVR-CNN [64]中提出的OV COCO設置,其中從COCO中選擇了48個類別作為基礎類別,17個作為新穎類別。所使用的評估指標是在IoU為0.5時的mAP。與先前方法相反,_作者在所有設置中執行零樣本生成OV檢測,而無需對基礎類別進行訓練_。表2展示了評估結果。作者的生成方法可以在新穎類別性能上顯著優于先前的判別方法。而且,在沒有對基礎類別進行訓練的情況下,作者的總體AP達到了與先前方法相當的水平。這些結果證明了基于生成的OV檢測作為一個有前景的范式的潛力。
密集字幕生成。 利用從大量的圖像-文本對中獲得的視覺概念知識,DetCLIPv3可以輕松地被適配以生成詳細的物體描述。遵循[23, 51]的研究,作者在VG V1.2 [25]和VG-COCO [51]數據集上評估了密集字幕生成的性能。為了確保公平比較,作者在訓練數據集上對作者的模型進行微調。類似于CapDet [38],在微調期間,作者將作者的OV檢測器轉換為一個類無關的前景提取器,這是通過將所有前景物體的文本標簽分配給概念'object'來實現的。表3將作者的方法與現有方法進行了比較。DetCLIPv3顯著優于現有方法。_例如_,在VG上,作者使用Swin-T(第7行)和Swin-L(第8行)作為 Backbone 網絡的模型,分別超過了之前最佳的方法GRiT [56](第6行),提高了2.9 AP和4.2 AP。

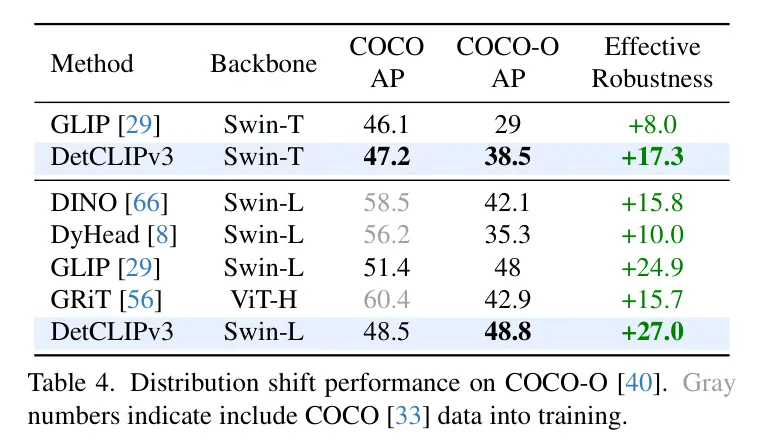
Robustness to Distribution Shift
一個健壯的OV目標檢測器應該能夠在各個領域識別廣泛的視覺概念。最近的視覺-語言模型CLIP [46] 通過學習大量的圖像-文本對,在ImageNet變體[19, 20, 54]的域遷移中展示了卓越的泛化能力。同樣,作者期望在OV檢測中觀察到類似的現象。為此,作者使用COCO-O [40] 來研究作者模型對分布變化的魯棒性。表4將作者的方法與幾種領先的閉集檢測器以及開集檢測器GLIP在COCO和COCO-O上進行了比較。由于COCO沒有包含在作者的訓練中,DetCLIPv3的性能落后于那些專門在它上面訓練的檢測器。然而,作者的模型在COCO-O上顯著超過了這些檢測器。例如,作者的Swin-L模型在COCO-O上達到48.8 AP,甚至超過了它在COCO上的性能(48.5 AP),并獲得了最佳的有效魯棒性分數+27.0。更多定性可視化結果請參考附錄。
Transfer Results with Fine-tuning
表5探討了通過在下游數據集上對DetCLIPv3進行微調來轉移其能力,即LVIS minival [24]和ODinW [29]。對于LVIS,考慮了兩種設置:(1) LVIS:僅使用基礎(常見和頻繁)類別進行訓練,如[43]中所做;以及(2) LVIS:涉及使用所有類別進行訓練。
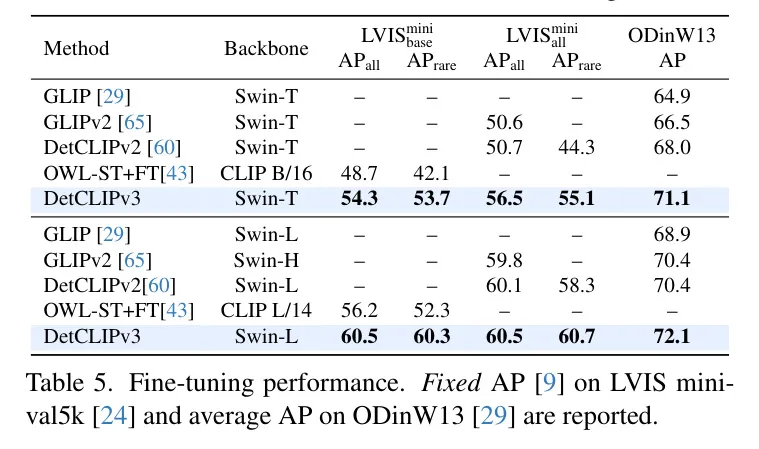
DetCLIPv3在所有設定中一致地優于其同類產品。在ODinW13上,基于Swin-T的DetCLIPv3(71.1 AP)甚至超過了基于Swin-L的DetCLIPv2(70.4 AP)。在LVIS上,DetCLIPv3展示了出色的性能,例如,基于Swin-L的模型在LVIS和LVIS上均達到了60.5 AP,超過了預先用20億偽標簽數據訓練的OWL-ST+FT [43](在LVIS上56.2 AP)一大截。這表明作者自動標注 Pipeline 構建的高質量圖像-文本對有效地提升了學習效率。此外,作者觀察到與[43]中類似的結論:在強大的預訓練支持下,即使僅在基礎類別上進行微調也能顯著增強稀有類別的性能。這體現在Swin-L模型從表1第15行的49.8 AP提升到表5的60.3 AP上。
Ablation Study
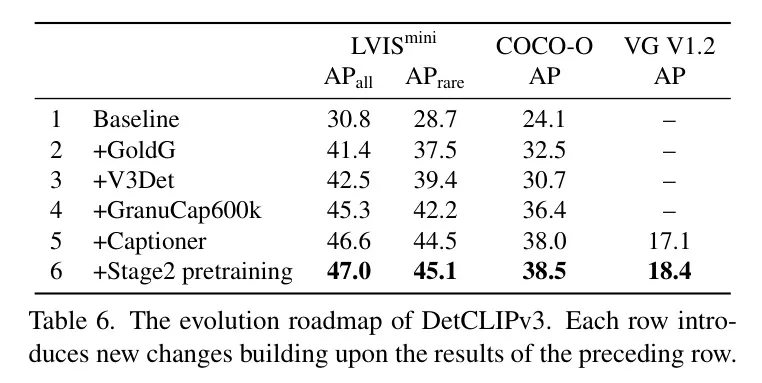
DetCLIPv3的演變路線圖。 表6探討了DetCLIPv3的發展路線圖,從 Baseline 模型到最終版本。作者的實驗采用了一個帶有Swin-T Backbone 網絡的模型。對于OV檢測器,作者在LVIS minival(第4.1節)和COCO-O(第4.3節)上評估了AP,對于字幕生成器,作者在VG(第4.2節)上報告了微調后的性能。作者的 Baseline (第1行)模型是去除了物體字幕生成器的OV檢測器(如第3.1節所述),僅在Objects365 [50]上訓練。這個模型能力有限,在LVIS上僅取得了30.8 AP的適中成績。隨后,作者引入了一系列有效設計:(1)融入更多的人工標注數據(第2行和第3行),即GoldG [24]和V3Det [55],將LVIS AP顯著提升到42.5。(2)引入圖像-文本對數據,即來自GranuCap50M的60萬樣本(也是作者第3階段訓練使用的訓練數據,見第3.3節),有效將LVIS AP進一步改進為45.3。更重要的是,它顯著提升了模型的領域泛化能力,將COCO-O的AP從第3行的30.7提升到第4行的36.4。(3) 第5行進一步整合了物體字幕生成器,但沒有了第2階段的預訓練。盡管沒有引入新數據,它還是將LVIS AP提升到46.6。這種改進揭示了學習字幕生成器對OV檢測的好處——學習為物體生成多樣化標簽鼓勵了物體解碼器提取更具判別性的物體特征。(4)整合第2階段字幕生成器預訓練高效地從GranuCap50M的大量圖像-文本對中獲取廣泛的視覺概念知識。這種設計顯著增強了字幕生成器的生成能力,將VG的AP從第5行的17.1提升到第6行的18.4。此外,它還將OV檢測性能從在LVIS上的46.6 AP適度提升到47.0 AP。
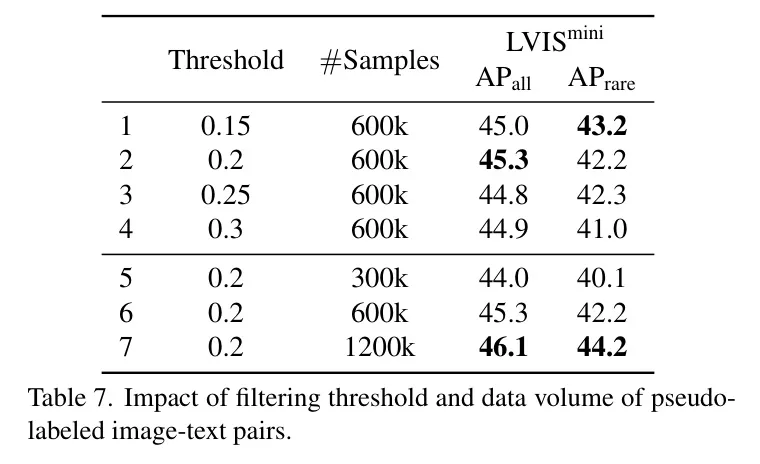
圖像-文本對的偽標記。 表7探討了在利用偽標記的圖像-文本對時兩個關鍵因素:過濾閾值和數據量。作者在第一階段訓練中使用了Swin-T模型,并整合了偽標記數據。0.2的過濾閾值取得了最佳效果,而數據的不斷增加也持續提高了OV檢測的性能。盡管使用1200k數據獲得了更好的結果,但考慮到效率,作者選擇在第三階段訓練中使用600k數據。值得注意的是,在生成性任務中輔助字幕器的學習時,600k數據樣本的有效性(表6第5行,46.6 AP)超過了沒有字幕器輔助的1200k樣本的結果(46.1 AP)。
Visualization
圖1展示了DetCLIPv3在OV檢測和目標標簽生成方面的可視化結果。作者的模型展現出卓越的視覺理解能力,能夠檢測或生成廣泛的視覺概念。更多可視化結果請參閱附錄。
5 Limitation and Conclusion
限制。 對DetCLIPv3生成能力的評估尚不完整,因為現有的基準測試在有效評估生成檢測結果方面存在不足。此外,DetCLIPv3當前的檢測過程不支持通過指令進行控制。未來,重要的研究方向將是開發用于評估生成式開放詞匯檢測器的全面指標,并將大型語言模型(LLMs)整合到指令控制的開放詞匯檢測中。
結論。在本文中,作者提出了DetCLIPv3,這是一種創新的OV檢測器,它能夠基于類別名稱定位目標,并生成具有層次性和多粒度的目標標簽。這種增強的視覺能力使得更全面的細粒度視覺理解成為可能,從而擴展了OVD模型的應用場景。作者希望作者的方法為未來視覺認知系統的發展提供啟發。
訓練。 DetCLIPv3的訓練涉及來自各種來源的數據。表8匯總了在不同訓練階段中使用的數據詳細信息。由于不同數據類型的訓練過程各不相同(例如,目標字幕器只接受圖像-文本對數據作為輸入),作者設計每個迭代的全局批次僅包含一種類型的數據。
對于開放詞匯檢測器的訓練,遵循先前的DetCLIP工作[58, 60],作者使用FILIP[59]語言模型的參數初始化文本編碼器,并在訓練過程中將學習率降低0.1,以保留通過FILIP預訓練獲得的知識。為了提高訓練效率,作者將文本編碼器的最大文本標記長度設置為16。
在訓練目標描述器時,作者使用Qformer [27]的預訓練權重來初始化描述器,而可變形[71]交叉注意力層則是隨機初始化的。為了保留在Qformer [27]預訓練期間獲得的知識,目標描述器使用與BERT [10]相同的分詞器來處理文本輸入,這與采用CLIP [46]分詞器的文本編碼器不同。目標描述器的最大文本標記長度設置為32。
在每一個訓練階段,為了節省GPU內存,采用了自動混合精度[41]和梯度預訓練權重[6]。表9總結了每個訓練階段的詳細訓練設置。
推理過程。 DetCLIPv3的OV檢測器的推理過程遵循DINO [66],其中每張圖像的結果來自于300個具有最高置信度分數的目標 Query 的預測。對于在LVIS [18]數據集上的固定AP [9]評估,要求整個驗證集中的每個類別至少有10,000個預測。為了確保每張圖像有足夠的預測數量,作者采用了類似于GLIP [29]的推理過程。具體來說,在為每個數據樣本進行推理時,1203個類別被分成31個塊,每個塊的大小為40個類別。作者分別為每個塊進行推理,并基于它們的置信度分數保留前300個預測。
在DetCLIPv3目標描述器的推理過程中,正如主論文中所描述的,對于每張圖像,作者使用作者開發的名詞概念語料庫中最頻繁的15k個概念作為文本 Query ,提取相似度最高的前100個前景區域。在目標描述器為這些區域生成描述性標簽后,使用OV檢測器對其置信度分數進行重新校準。然后對那些重新校準后分數高于0.05的區域執行一個類無關的非最大值抑制(NMS)操作,其結果作為預測輸出。作者對目標描述器的推理設置了等于1的束搜索(beam search)大小。
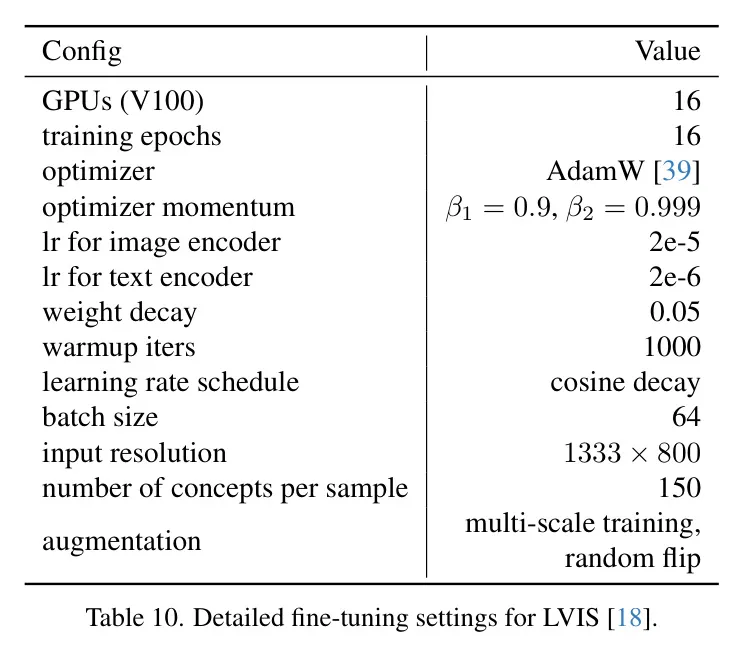
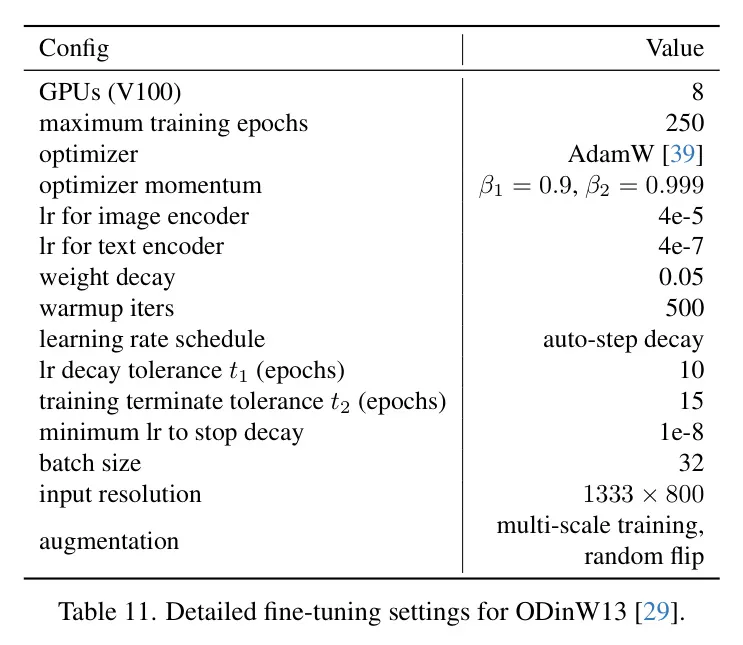
微調。 作者在兩個數據集上對DetCLIPv3進行微調,即LVIS [18] 和 ODinW13 [29]。表10和11分別總結了LVIS和ODinW13的詳細微調設置。對于LVIS,當用基礎類別進行微調時,在采樣負概念時會排除新類別。對于ODinW13,類似于DetCLIPv2[60],作者采用自動衰減的學習率計劃。具體來說,當性能達到平臺期并在容忍期內持續時,作者將學習率降低0.1倍。如果在容忍期內性能沒有提升,作者則終止訓練過程。
Appendix B Additional Data Pipeline Details
圖5展示了DetCLIPv3自動標注數據流程的概覽。

提示。 在這里,作者提供了每個步驟中使用的提示,包括用于VLLMs以及GPT-4的提示。
使用VLLM重制標題:作者采用Instruct-BLIP [7]對240K圖像-文本對進行重新配文。為了利用原始標題文本中的信息,作者使用以下提示: “給定圖像的噪聲標題: {原始標題}, _編寫圖像的詳細清晰描述”。
使用GPT-4進行實體提取:在這一步驟中,作者首先利用GPT-4從VLLM生成的標題中過濾掉非實體描述。使用的提示是:_“這是一張圖片的標題:{caption}。提取與圖像中可直接觀察到的事實描述相關的部分,同時過濾掉提及推理內容、氣氛/外觀/風格描述以及歷史/文化/品牌介紹等部分。只返回結果,不包含其他內容。如果你認為沒有事實描述,只需返回'None'。” 隨后,作者使用以下提示從過濾后的標題中提取關于目標實體的信息:_“你是一個AI,負責從大量圖像標題中開發一個開集目標檢測數據集,無法訪問實際的圖像。你的任務是按照以下原則準確地識別和提取這些標題中的'目標':
- '物體'在物理上是可觸摸的:它們必須是可以在圖像中視覺表示的具體實體。它們不包括以下內容:
- 抽象概念(例如“歷史”、“文化”)或情感(例如“悲傷”、“快樂”)
- 對圖像本身(例如“圖像”、“圖片”、“照片”)或相機(例如某物正對著“相機”)的元引用,除非它們專門指圖像中的物理元素。
- 任何描述詞(如“外觀”、“氣氛”、“顏色”)
- 事件/活動及過程(如“游戲”、“演講”、“表演”)和特定事件類型(如“鄉村風格婚禮”、“電影節”)
- 構圖方面(如“透視”、“焦點”、“構圖”)或視角/看法(如“鳥瞰圖”)。
- 物體在視覺上是獨特的:它們是獨立的實體,可以從其環境中視覺上隔離開來。它們不包括環境特征(如“多彩環境”)和一般的位置/場景描述符(例如,“室內場景”,“鄉村設置”,“晴天”,“黑白插圖”)。在提取過程中遵循以下指南:
- 合并重復項:如果提取的多個“物體”指代字幕中的同一實體,將它們合并為一個,同時保留概念多樣性。
- 對描述性變體進行分類:對于用形容詞描述的“物體”,提供帶形容詞和不帶形容詞的兩個版本。
- 識別更廣泛的類別:為每個“物體”分配一個“父類別”。以下是你結果的編號列表格式:id. “帶形容詞的物體”, “不帶形容詞的物體”, “父類別”。你的回復應僅包含結果,不含多余內容。以下是字幕:{字幕}。
- 針對大規模標注的VLLM指令調整:在這個階段,作者使用上面得到的字幕文本和物體實體信息來微調LLaVA [35] 模型。在這里,作者將前述信息組合成一個新的簡潔提示,并構建如下問題-答案對:_問題:“從圖像的噪聲字幕:{原始字幕},生成一個精煉的圖像描述,并識別所有可見的‘物體’——圖像中任何視覺和物理可識別的實體。記住以下指南:
- 從字幕中合并相似的‘物體’,保留概念多樣性。
- 對于用形容詞描述的‘物體’,提供帶形容詞和不帶形容詞的兩個版本。
- 為每個‘物體’分配一個‘父類別’。以如下格式呈現結果:字幕:{字幕} 物體:{id. ‘帶形容詞的物體’,‘不帶形容詞的物體’,‘父類別’}。<圖像標記>” 答案:字幕:{精煉的字幕} 物體:{實體信息} 在這里,VLLM接收圖像標記<圖像標記>和它們的原始字幕{原始字幕}作為輸入,并學習生成精煉的字幕以及提取關于物體實體的信息。
可視化。 圖2-a和2-b展示了通過作者提出的數據處理流程獲得的細化標題和提取的實體信息。此外,圖3顯示了在第一階段訓練后,作者基于Swin-L的模型生成的邊界框偽標簽。
Appendix C More Qualitative Results
圖4-a、4-b和4-c展示了DetCLIPv3的目標字幕生成器產生的多粒度目標標簽的附加定性結果。在沒有候選類別的情況下,DetCLIPv3的目標字幕生成器能夠生成密集、細粒度、多粒度的目標標簽,從而促進了對圖像的更全面理解。
Appendix D More Experimental Results
表10:針對LVIS [18] 的詳細微調設置。
表11:ODinW13 [29]的詳細微調設置。
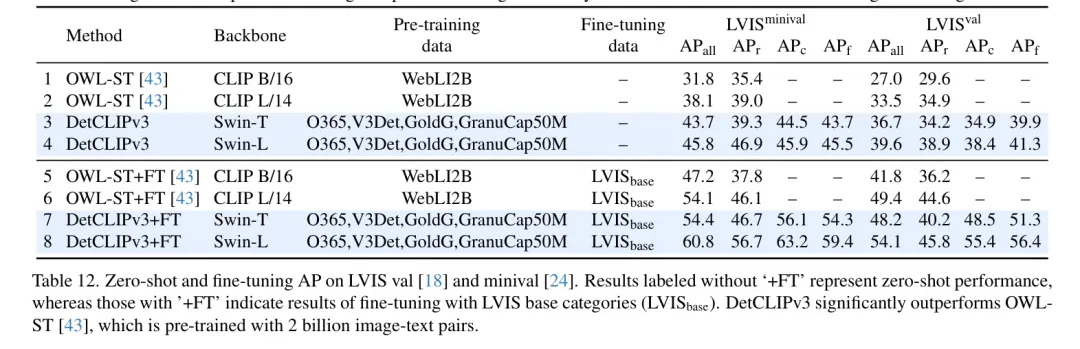
關于LVIS的更多結果。 為了全面評估DetCLIPv3的性能,表12提供了在LVIS上的標準平均精度(Average Precision, AP),并將其與在20億圖像-文本對上預訓練的最新方法OWL-ST [43] 進行比較。具體來說,作者在LVIS minival [24] 和驗證 [18] 數據集上評估了兩種設置:零樣本性能和經過在LVIS基礎類別上微調后的性能。
3 擴展實體
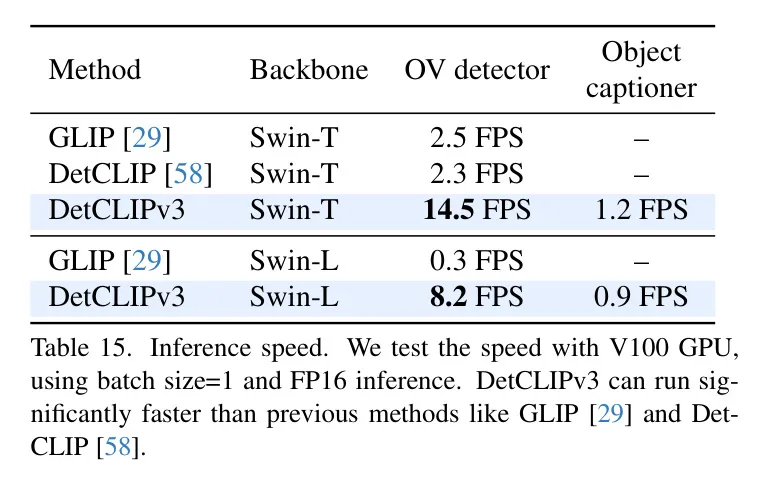
推理速度。 表15報告了DetCLIPv3的推理速度以及與先前方法的比較。