













全副武裝,這個“鋼鐵俠”能跑能救人,還或成為首個能飛行的人形機器人!
大數據文摘出品
作者:Caleb
隨著湯加火山噴發的發生,越來越多的地區遭遇了洪水、地震等自然災害。
自然災害頻頻發生,我們也不能坐以待斃,必須采取各種手段提前預警,以及做好災后救援和重建工作。
說到災后救援,機器人的作用就體現出來了。
雖然像波士頓動力公司這樣的機器人公司已經能夠生產出比較完美且實用的人形機器人,但這類機器人仍然有很多局限性和未開發之處。
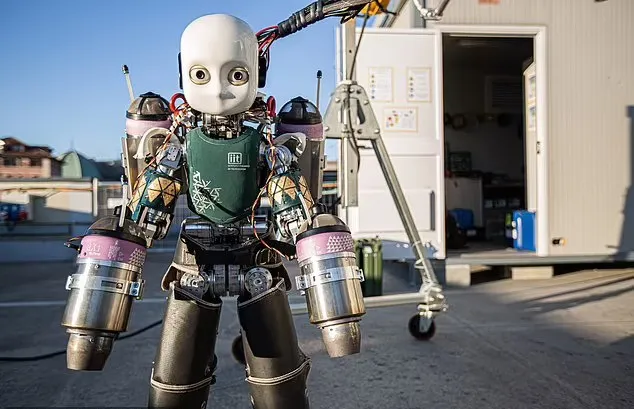
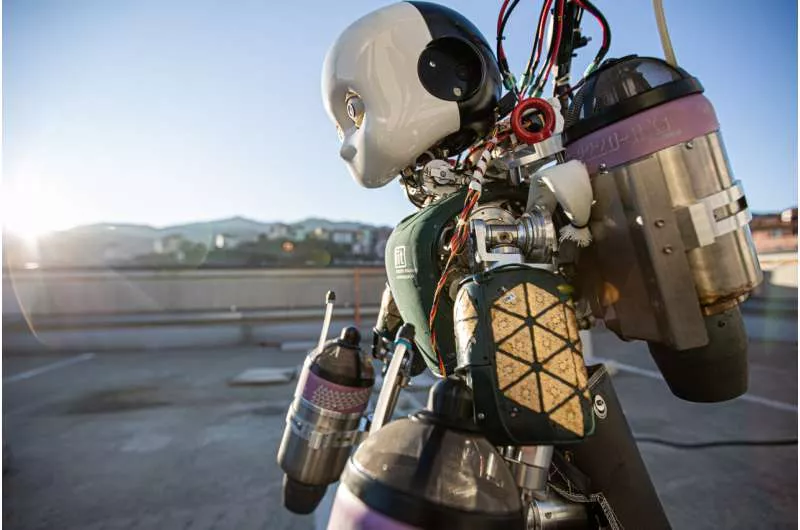
也正是基于這個研究缺口,意大利熱那亞Istituto Italiano di Tecnologia(IIT)的專家開發了一種能使用噴氣背包飛行的機器人iCub,正是用于在自然災害后提供幫助。
iCub有3.4英寸高,能夠在飛行時控制功率和方向,以更好地達到人類或無人機無法達到的地方進行支援。
這也不禁讓人想起鋼鐵俠,看這全副武裝的樣子,還真是有點內味兒呢。

在進行飛行模擬時,由于推力難以直接測量,通常根據機載傳感器收集的數據進行估算。但IIT團隊最近提出了一個新框架,可以估計未配備推力測量傳感器的飛行多體系統的推力強度。該研究以論文的形式發表在了IEEE Robotics and Automation Letters上。
能走還能飛,iCub已在中國等國家實驗
據統計,每年大約會發生300起自然災害,造成約90,000人死亡,影響全球1.6億人。
針對此,人形機器人的作用相當有限,目前還沒有一個完全成熟的人形機器人能夠在室外獨立工作。
實驗室負責人Daniele Pucci表示,“我們最早在2016年左右就有了制造飛行人形機器人的想法,主要開發一些可以在災難場景中運行的機器人,比如在部分被毀壞的建筑物內進行救援”。
最開始,Pucci和同事們的主要目標是設計一種可以操縱物體、在地面上行走和飛行的機器人。但由于人形機器人本身既可以操縱物體又可以在地面上移動,團隊決定擴展人形機器人的能力,包括飛行,而不是開發一個全新的機器人結構。
一旦有了推進引擎的支持,iCub不僅能夠飛行,穿越不同類型的地形,越過沿途的障礙物,最基礎的四肢爬行、行走和坐起也不在話下,畢竟手部被設計成能夠“支持各種復雜的操作技能”。
而一旦著陸后, iCub可以自行打開門窗走進建筑物內,以檢查可能需要醫療護理或幫助逃生的幸存者。
畢竟據了解,這可是“世界上為數不多的擁有敏感全身皮膚來處理與環境的安全物理交互的平臺之一”。
目前為止,該實驗室已經建造了40多個這樣的機器人,并在歐洲、美國、韓國、新加坡、中國和日本的實驗室進行了試驗。
估計推力強度的兩大信息源
最初,Pucci等人試圖為iCub提供在地面上平衡身體的能力,例如用單腳站立。在他們實現了這點后,他們就開始致力于擴大機器人的運動技能,使其能在空中飛行和移動。
“據我們所知,我們是最開始提出關于飛行類人機器人的,”Pucci說,“那篇論文顯然只是在模擬環境中測試飛行控制器,但鑒于有希望的結果,我們開始了設計iRonCub的旅程,這是我們最新論文中提出的第一個噴氣動力人形機器人”。
研究人員創建的推力估計框架大大簡化了飛行機器人的設計,并降低了其制造成本,因為它不需要在推動機器人的每個噴氣發動機上安裝力傳感器。該框架不是使用力傳感器數據來估計推力,而是將兩個不同的信息來源結合到一個單一的估計過程中。
框架使用的第一個信息來源是由一個模型得出的,該模型將發送到噴氣發動機的指令與所產生的推力聯系起來。這是一個數據驅動的模型,是根據研究人員收集的數據訓練出來的。
“我們先是建立了一個臨時的實驗裝置,可以放置噴氣發動機,并安全地進行實驗。通過使用這個裝置,我們收集了來自噴氣發動機的輸入/輸出數據,并選擇了描述發動機行為方式的模型,這也是建立在我們此前工作的基礎之上。”
該團隊的框架用來估計推力的第二個信息來源是整個機器人的所謂“中心動量”(centroidal momentum)。“如果使用得當,這個值可以描述一個跳下懸崖的潛水員的運動特征,也可以用來聯系機器人運動在起飛前后的原因(即推力)和效果(例如起飛的垂直加速度)”。

“我相信我們有足夠的知識和意愿來實現這一里程碑”
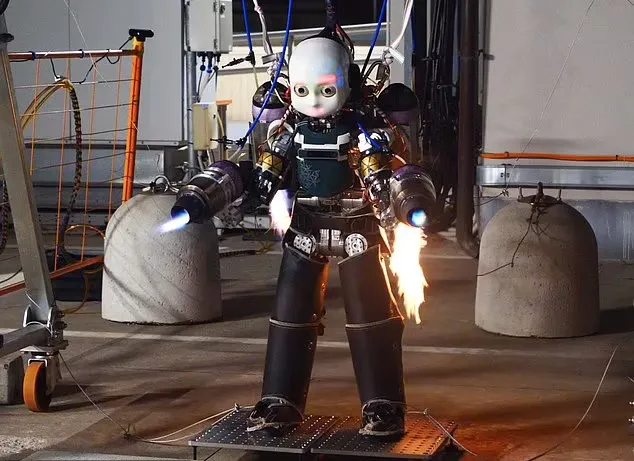
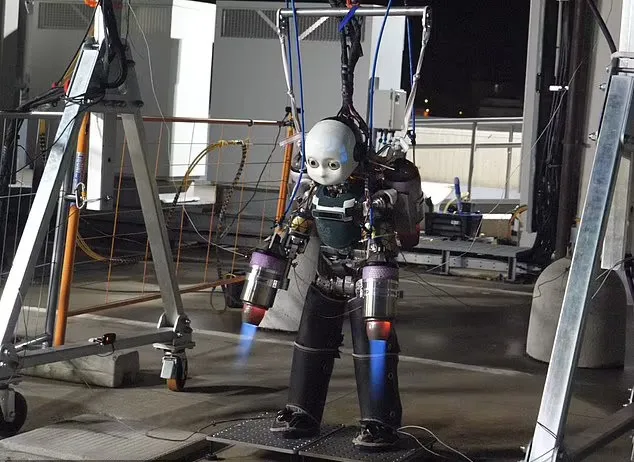
為了評估框架的有效性,Pucci和同事在一個新開發的機器人iRonCub上進行了測試。iRonCub是iCub機器人的進化版,集成了噴氣發動機。
“與噴氣動力機器人打交道不是一件容易的事,因為噴氣空氣溫度可能達到700攝氏度,空氣速度可能具有超音速特征,流速約為1800公里/小時。為此,我們制定了嚴格的實驗程序和協議,同時還需要克服一些難題,這些問題與經典的機器人研究相去甚遠,而更接近于航空電子學領域”。
雖然研究人員到目前為止只在他們的仿人機器人iRonCub上測試了推力估計框架,但它也可以應用于其他不同身體結構的飛行機器人。這包括可重新配置的飛行機器人,即可以改變形狀或配置以執行特定動作的系統。
“估計推力的問題在任何情況下對成功的飛行都是至關重要的。此外,除了飛行人形機器人在類似災難情況下的未來應用,我們相信我們的工作可以應用于比飛行人形機器人更簡單的設計,包括噴氣動力的飛行箱。”
作為中期研究目標,Pucci的兩位同事Affaf Momin和Hosameldin Awadalla計劃利用人工智能和數據驅動的計算工具來改進他們創建的推力估計框架。隨后,他們的同事Giuseppe L'Erario將專注于把這些算法整合到控制器中,以統一機器人的行走、操縱、運行、起飛和水平飛行策略。
不過短期內,他們還需要專注于解決iRonCub不被拴住的問題。
但Pucci對整個項目十分樂觀,“我相信我們有足夠的知識和意愿來實現這一重要的里程碑,這是遲早的事”。
相關報道:
- https://www.dailymail.co.uk/sciencetech/article-10414935/Iron-Man-style-robot-designed-search-terrain-natural-disasters.html
- https://designtaxi.com/news/417265/A-Flying-Humanoid-Robot-Is-Built-To-Save-People-From-Disasters-Like-An-Avenger/????
- https://nerdist.com/article/icub-flying-humanoid-baby-robot-will-help-rescue-people/
- https://techxplore.com/news/2021-12-humanoid-robot.html?utm_source=DesignTAXI&utm_medium=DesignTAXI&utm_term=DesignTAXI&utm_content=DesignTAXI&utm_campaign=DesignTAXI????



















