













針對智能駕駛的預期安全系統架構
作為未來智能駕駛的發展方向,關鍵技術的研究取得了重大進展。然而,由于近期無人駕駛事故頻發,安全性能令人擔憂。為了解決安全問題,提出了一種智能駕駛安全系統。該系統針對智能汽車感知、決策和控制方面的預期問題,實時提供安全分析和監控服務模塊。基于預期功能安全的概念,對駕駛場景和系統安全進行分析和評估,以提高智能駕駛的安全性,有助于智能駕駛的發展。
1. 介紹
智能駕駛汽車的駕駛行為高度依賴于操作系統的穩定性、智能性、安全性。
安全風險主要來源于以下三類:
硬件安全
與傳統汽車相比,智能駕駛汽車不要求駕駛員直接控制車輛,而是將部分或者是全部的控制權限交由自動控制系統。硬件架構設置是否科學合理;各無人計算控制單元和控制器的設置是否完善;無人駕駛的傳感器是否完善;車輛能夠快速準確地獲取道路環境信息,車輛運動感知和信息融合功能在無人駕駛車輛中起著決定性作用。
軟件安全
與傳統汽車相比,自動駕駛汽車的開發時間較短,技術開發仍不成熟,軟件系統仍需要長期的可靠性分析。例如,著名的無人駕駛汽車制造商谷歌已經在無人駕駛汽車平臺上進行了9年的封閉式測試,但測試時間不夠,因素也相對很簡單。因此,其安全性和穩定性仍需要長期監測。
環境安全
在人工智能算法的基礎上,智能駕駛汽車能夠實現自動避障和完成自動駕駛在一些較為復雜的道路上。然而,無人駕駛汽車仍然需要其他的交通參與者的正確駕駛來駕駛。只有當其他駕駛員做出正確駕駛的判斷時,無人駕駛汽車的測試才會相應做出正確、合理的判斷。
該論文在對無人駕駛事故和安全隱患的分析基礎上,提出了自動駕駛汽車的預期安全系統。該系統可以進行監督、預測和保證智能駕駛車輛的駕駛狀態,從感知、決策和控制等方面提高智能駕駛的安全性。
2. 系統架構
智能駕駛離不開幾項關鍵技術。在宏觀層面,智能駕駛基于環境感知、路徑規劃和決策控制等核心技術。
結合上一段提到的幾個關鍵技術,智能駕駛有了真正駕駛的技術支撐,而安全技術是自動駕駛汽車能否真正在公共道路上行駛的前提。2011年發布的ISO26262《道路車輛功能安全》國際道路車輛功能安全標準,為電子控制系統故障引起的安全風險提供了系統的解決方案。
由于自動駕駛汽車可以獨立于駕駛員控制車輛的部分或全部行為,任何影響其感知、決策和執行的因素都可能構成車輛危險。根據不同的風險來源和所需的安全技術,比較分析見下表。

系統功能限制
主要原因是設計開發過程中的系統功能定義不能完全滿足目標市場的使用要求。對目標場景的考慮不全面,導致系統無法準確識別環境要素;功能仲裁邏輯不合理,導致系統決策錯誤;執行機構響應不足,導致運動控制偏離預期。
環境干擾
自動駕駛受到路況、周邊事物、環境天氣等諸多因素的影響。如何克服環境干擾,可靠地執行環境工作行車識別、駕駛決策和運動控制是確保安全駕駛的關鍵。預期安全系統源于預期功能安全(SOTIF)的概念,旨在為智能駕駛的感知、決策和控制系統(執行響應)設計一種安全監管系統,以克服環境干擾,改善智能駕駛系統的局限性。建議的安全系統架構如下圖所示。
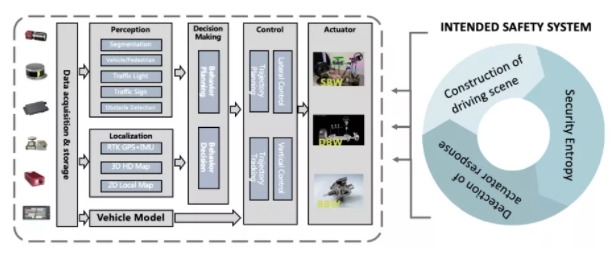
該安全系統預計將分為三個基本模塊:感知數據的處理、決策信息的確定和執行器響應的檢測。首先,基于智能車輛傳感器的感覺數據,進行多傳感器分析和融合,重建當前的駕駛場景。通過分析駕駛現場,安全系統可以確定每個傳感器的置信度,并根據傳感器的置信度為智能汽車的決策和控制提供保證。
其次,決策信息的判斷主要基于“安全熵”和安全系統的定量評價。最后,執行器響應的檢測相對偏向于仿真和測試。對于已知情況,可以選擇軟件/硬件測試和車輛測試.
3. 駕駛現場和系統安全
駕駛現場構建
要分析駕駛場景,構建場景數據庫(如下圖)是一個先決條件。針對不同的典型場景,通過采集真實駕駛員的駕駛數據,形式化并分析駕駛決策。智能車輛結合場景檢索與識別,在保證各項功能的前提下,可以大大提高智能駕駛的安全性。
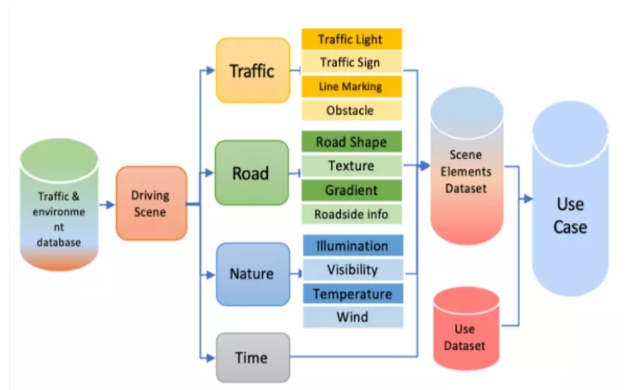
本文提到的駕駛場景庫由交通信號.道路屬性.環境屬性.時間構成
因此,提出了一種對行車場景進行定性分析作為多傳感器融合基礎的行車場景構建方案。定性分析方法來源于自然語言中的知識提取算法。知識提取的過程可以概括為三個步驟。第一步是識別與本體(ontology)相匹配的概念、概念實例、屬性和簡單值;第二步是根據內容和本體定義,將識別出的三元組元素正確組合,構建正確的知識三元組;最后一步是基于本體對抽取的事實知識的有效性和完整性進行檢驗,刪除無效知識和不完整知識,確保添加到領域本體知識庫中的知識是有效的和完整的。例如,通過獲取天氣信息,如今天的雨天,結合已建立的用例庫,可以推斷激光雷達的置信度由于環境干擾而降低。因此,在這種情況下,激光雷達的權重應該相應地減少,以確保安全。
結合以上的定性分析,對駕駛場景的定量分析也是必不可少的。利用模糊數學中的基本概念,用公式定量描述駕駛場景。
圖片其中V1表示交通信息,即交通燈、交通標志;V2表示道路信息,如道路材料、道路起伏、道路物體信息;V3表示自然條件,如雨、雪、霧、霾、空氣流量、溫度、濕度等;V4表示時間。
結合定性和定量的概念,分析各個因素的影響,并根據不同因素的組合實現自主駕駛決策。目前的決策方法大多過于單一,不能完全適用于復雜的社會環境。因此,場景信息不僅可以增強智能駕駛感知系統,還可以針對不同場景提供不同的駕駛策略,從而提高智能車輛的環境適應性和駕駛穩健性。
拓展安全熵
近年來,熵作為一個更籠統的概念被提出,熵的應用在深度和廣度上都有了進一步的發展。預期功能的安全性(SOTIF)有望成為智能駕駛的研究熱點之一。因此,提出了預期安全熵的概念。它可以定義為在熵權下智能駕駛車輛的各種預期功能因素(包括感知、決策、執行器等)的不確定性的總和。
對于安全系數,其安全性 可用于指示其執行安全功能的能力。安全程度可以從熵的角度來分析。它必須有一個與安全程度相對應的安全熵來表示安全因素的不確定性、混亂性和無序性。安全程度越大,其自身的不確定性(uncertainly)、混亂(chaos)和無序(disorder)就越小。安全熵是衡量安全因子本身混沌程度的一個度量,安全熵由安全性圖片定義
可用于指示其執行安全功能的能力。安全程度可以從熵的角度來分析。它必須有一個與安全程度相對應的安全熵來表示安全因素的不確定性、混亂性和無序性。安全程度越大,其自身的不確定性(uncertainly)、混亂(chaos)和無序(disorder)就越小。安全熵是衡量安全因子本身混沌程度的一個度量,安全熵由安全性圖片定義
定義安全系統的熵應該由環境∩車輛的概率狀態來定義。假設環境處于異常安全狀態是
因此,系統的安全熵定義為

從熵的本質意義出發,熵是一個廣義的度量。兩種狀態混合后,熵應該是兩種狀態對應的熵之和,即
因此,
安全熵和熵的概念是安全動力學研究的基礎,可以作為解釋安全系統穩定性和判斷安全系統是否不穩定的判據。可見,所定義的安全熵概念符合廣義熵的性質,從而為安全系統的安全熵和其他領域的熵提供了橋梁。
4. 未來發展
安全是汽車行業發展的永恒主題。通過分析環境和車輛因素對自動駕駛的安全影響,解釋風險的來源和發生機制,并提出對策。通過充分考慮安全風險的來源,系統地實施功能安全、信息安全、SOTIF等安全技術,可以確保自動駕駛實現整體安全,相關自動駕駛汽車實現規模化應用。
提出的自動駕駛汽車的預期安全系統是基于國際上正在實施的 SOTIF 技術標準的發展。該國際技術標準是首個自動駕駛汽車安全技術標準,對自動駕駛汽車系統安全技術的開發和驗證具有重要的指導意義。



















