













特斯拉都搞不定,車路協(xié)同是無(wú)人駕駛的終極解決方案嗎?
先是萬(wàn)億,后是1.2萬(wàn)億,特斯拉市值不斷創(chuàng)下新高。
放眼望去,整個(gè)車企行業(yè)都在積極擁抱無(wú)人駕駛。
可以說(shuō),特斯拉萬(wàn)億市值摧毀了傳統(tǒng)車企對(duì)舊時(shí)代的一絲留念。
然而,現(xiàn)實(shí)是包括特斯拉,Waymo在內(nèi)的無(wú)人駕駛企業(yè)在安全性和高級(jí)別無(wú)人駕駛技術(shù)的推進(jìn)上屢屢受挫。
先不說(shuō)多次致命的特斯拉撞車案,Waymo自動(dòng)駕駛汽車還有著「不撞南墻不回頭」的執(zhí)著。
就比如最近在洛杉磯市的一條死胡同,這條路每天最多要「接待」50輛Waymo自動(dòng)駕駛汽車,而且已經(jīng)持續(xù)了8個(gè)星期。
于是,一條獨(dú)特的風(fēng)景線就這樣誕生了:「每5分鐘」就能看到一輛Waymo在掉頭。

不論是特斯拉,還是Waymo,它們都是單車智能的典型代表——通過(guò)提升車子自身的智能化水平實(shí)現(xiàn)自動(dòng)駕駛,看似智能其實(shí)不一定。
無(wú)法識(shí)別「白色卡車」、十年僅累積3000多萬(wàn)公里路測(cè)數(shù)據(jù)等等,這是單車智能目前無(wú)法解決的瓶頸。
如果現(xiàn)在能夠把車和路結(jié)合,以車端的智能+路端的智能互相結(jié)合,是不是會(huì)成為高級(jí)別自動(dòng)駕駛的另一種出路?
車路協(xié)同VS單車智能
還是用Waymo紛紛駛?cè)胨篮@件事舉例吧。
如果像我們小時(shí)做題那樣,單純地在地圖上連線的話,這路,確實(shí)可以走。

當(dāng)然,前提是這個(gè)路的盡頭沒(méi)有下面這個(gè)牌子。

為什么這條路明明是「死路」,無(wú)人駕駛車還要往里使勁開(kāi)呢?
其實(shí)很簡(jiǎn)單,因?yàn)閃aymo的車載地圖并不知道……
結(jié)果就導(dǎo)致,所謂的自動(dòng)駕駛車輛直到走到跟前才發(fā)現(xiàn):「哦,此路不通」,于是只能掉頭往回走。
這就是單車智能難以逃避的一個(gè)局限性:只能以車為中心對(duì)周邊區(qū)域進(jìn)行局部感知,只有車輛能識(shí)別到才能進(jìn)行相應(yīng)的調(diào)整和動(dòng)作。
那么,如果是用「車路協(xié)同」來(lái)實(shí)現(xiàn),又會(huì)是如何呢?

(來(lái)源:德勤分析)
車路協(xié)同,顧名思義是由「車端」和「路端」兩大關(guān)鍵部分組成,其實(shí)除了這兩個(gè)看得見(jiàn)的部分外,還有看不見(jiàn)的“云端”來(lái)為車和路的協(xié)同配合來(lái)提供后臺(tái)支持:
- 車端:可以聯(lián)網(wǎng)且具有一定自動(dòng)駕駛能力的車輛;
- 路端:包含智能感知設(shè)施(攝像頭、毫米波雷達(dá)、激光雷達(dá)等)、路側(cè)通信設(shè)施、計(jì)算控制設(shè)施(邊緣計(jì)算節(jié)點(diǎn)等)等配套設(shè)備。
- 云端:包括計(jì)算平臺(tái)和云控平臺(tái)等后端平臺(tái),可以將車和路的信息進(jìn)行實(shí)時(shí)收集、計(jì)算和處理,將車和路的協(xié)同能力調(diào)配到最優(yōu)狀態(tài)。
和單車智能僅靠車端來(lái)感知外界不同,「聰明的車」+「智慧的路」+「強(qiáng)大的云」,三者的協(xié)同結(jié)合將使得車路協(xié)同具備站得高、坐的穩(wěn)、數(shù)據(jù)好、算得快的這幾個(gè)技術(shù)優(yōu)點(diǎn)。

蒙上「眼睛」的車
站得「高」、看得遠(yuǎn)的「上帝視角」
先說(shuō)站的高。
在車路協(xié)同的方案里,“高高在上”的路端設(shè)備能夠以「上帝視角」實(shí)時(shí)獲取路況信息:激光雷達(dá)負(fù)責(zé)物體三維坐標(biāo)的探測(cè),配合上毫米波雷達(dá)、攝像頭和5G傳輸設(shè)備,從而能夠?qū)崿F(xiàn)局部高精度地圖的實(shí)時(shí)繪制和路況的實(shí)時(shí)動(dòng)態(tài)跟蹤。
當(dāng)這種以「上帝視角」采集到的信息與車端進(jìn)行交流后,「車端」除了一如既往地通過(guò)多種傳感器來(lái)進(jìn)行環(huán)境的感知和數(shù)據(jù)的融合外,還能無(wú)延遲地實(shí)時(shí)接受路端提供的信息。
隨著「路端」將交通參與者的位置、速度、軌跡等信息不停地發(fā)送給「車端」,也就相當(dāng)于讓車本身?yè)碛辛艘粋€(gè)無(wú)死角、無(wú)限遠(yuǎn)的全域感知,從而能夠提前了解到路上的實(shí)際情況并進(jìn)行及時(shí)的響應(yīng)。
因此,在車輛的行駛中,不管是預(yù)測(cè)準(zhǔn)確率,還是復(fù)雜場(chǎng)景的通行效率都可以得到提升。可以說(shuō),車路協(xié)同的本質(zhì)是讓車「站」的更高、「看」得更遠(yuǎn)了。

「站得高」的路端感應(yīng)設(shè)備
那么,回到最開(kāi)始的那個(gè)問(wèn)題,如果有了車路協(xié)同,Waymo還會(huì)不會(huì)開(kāi)進(jìn)死胡同里?現(xiàn)在,就非常好回答了。
在車路協(xié)同的加持下,車不僅能「知道」前面的路到底能不能走,甚至能提前知道前面道路上行人和車輛的實(shí)時(shí)情況, 自然也就不會(huì)再去「不撞南墻不回頭」了。
當(dāng)然,這種站得高并非只是物理位置的“高”,還是統(tǒng)籌全局的“高”:當(dāng)系統(tǒng)發(fā)現(xiàn)前方道路在施工或發(fā)生變化時(shí),就可以及時(shí)指揮車輛進(jìn)行調(diào)整路線,實(shí)現(xiàn)交通優(yōu)化。
據(jù)有關(guān)數(shù)據(jù)計(jì)算顯示,基于車路協(xié)調(diào),道路的擁堵情況在道路上無(wú)人駕駛車輛和有人駕駛車輛同時(shí)存在的情況下就能降低30%~40%,如果全是無(wú)人駕駛甚至可以基本解決道路擁堵問(wèn)題。
數(shù)量大、質(zhì)量高的數(shù)據(jù)收集
在無(wú)人駕駛中,系統(tǒng)對(duì)數(shù)據(jù)的收集效率和收集質(zhì)量是解決應(yīng)用落地最為重要的因素:只有收集到龐大和高質(zhì)量數(shù)據(jù)來(lái)進(jìn)行分析和學(xué)習(xí),才更使系統(tǒng)更精準(zhǔn)地進(jìn)行優(yōu)化。
這也是蘭德公司早在2016年就提出,「L4級(jí)無(wú)人駕駛車輛的量產(chǎn)需要測(cè)試177億公里(110億英里)以上才能實(shí)現(xiàn)」的原因——畢竟駕駛行為是涉及到“人命關(guān)天”的大事,哪怕在駕駛行為的處理中有0.1%的概率出現(xiàn)問(wèn)題,都有可能會(huì)造成車毀人亡的大事故。
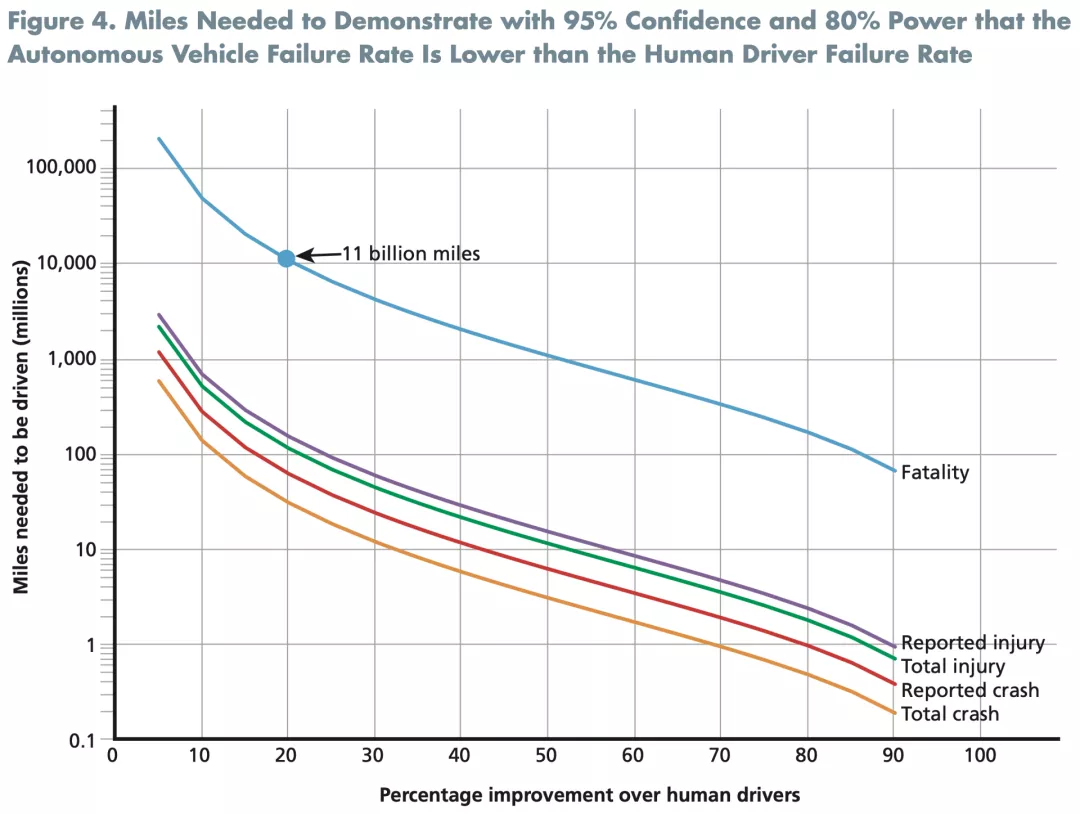
(來(lái)源:Rand)
然而,在單車智能方案中,以Waymo為例,雖然背靠著谷歌這個(gè)大靠山,在投入了巨額的資金,十年的時(shí)間里才積累了3500萬(wàn)公里的真實(shí)路測(cè)數(shù)據(jù),遲遲不能實(shí)現(xiàn)應(yīng)用和落地。
這實(shí)際上是單車智能方案的共性問(wèn)題:緩慢的數(shù)據(jù)收集能力使得學(xué)習(xí)能力變得緩慢;學(xué)習(xí)能力的緩慢也使得系統(tǒng)的優(yōu)化提升變得緩慢;系統(tǒng)優(yōu)化的緩慢導(dǎo)致了方案落地的緩慢。
比如,在2021年5月,面對(duì)著一個(gè)人類駕駛員很容易處理的情況,Waymo自動(dòng)駕駛汽車卻陷入了「三角錐難題」,以一己之力,連續(xù)數(shù)次堵住道路。出現(xiàn)這種情況的根本問(wèn)題就是它從來(lái)沒(méi)有遇到過(guò)這種情況,也從來(lái)沒(méi)有解決這種情況的方案。

與此相對(duì)的則是車路協(xié)同方案在數(shù)據(jù)收集能力上的顛覆性的突破:除了收集「車」上的數(shù)據(jù)以外,還會(huì)以「路」為單位進(jìn)行收集;除了收集無(wú)人車輛的行駛數(shù)據(jù),還收集人類駕駛員的數(shù)據(jù)。
僅以蘇州為例,在完成路端的改造后,在數(shù)據(jù)「量」上,全市公路里程1.2萬(wàn)公里,按450萬(wàn)輛汽車的真實(shí)行駛里程計(jì)算,每天可收集1.2億公里的真實(shí)車輛行駛數(shù)據(jù);在數(shù)據(jù)「質(zhì)」上,「路端」的收集的數(shù)據(jù)不但全視角、可連續(xù),而且還能夠記錄真實(shí)CornerCase發(fā)生的前因后。

大數(shù)據(jù)處理
算力大、計(jì)算快的「隱身英雄」
當(dāng)然了,如此巨大的數(shù)據(jù)量也不是個(gè)善茬,帶來(lái)的是對(duì)整個(gè)系統(tǒng)「算力」的極高要求。然而,單車智能搭載的芯片由于空間和功耗的限制,目前的算力最高只能達(dá)到1000+TOPS。
這是個(gè)什么概念?

(來(lái)源:未來(lái)汽車日?qǐng)?bào))
從L3有條件的自動(dòng)駕駛開(kāi)始,車輛除了需要控制自身的轉(zhuǎn)向和加速減速以外,還需要在行駛過(guò)程中對(duì)環(huán)境進(jìn)行監(jiān)測(cè)。
此時(shí),車載芯片的算力起點(diǎn)就已經(jīng)從L2的2Tops提升到了L3的24Tops。
進(jìn)入到L4和L5階段之后,還需要加入緊急事件觸發(fā)接管機(jī)制,此時(shí)對(duì)算力的要求幾乎是呈現(xiàn)「指數(shù)」級(jí)的上升,達(dá)到320TOPS和4000TOPS。
至少目前來(lái)看,單車智能在面對(duì)如此海量的數(shù)據(jù)時(shí),只能選擇「躺平」。
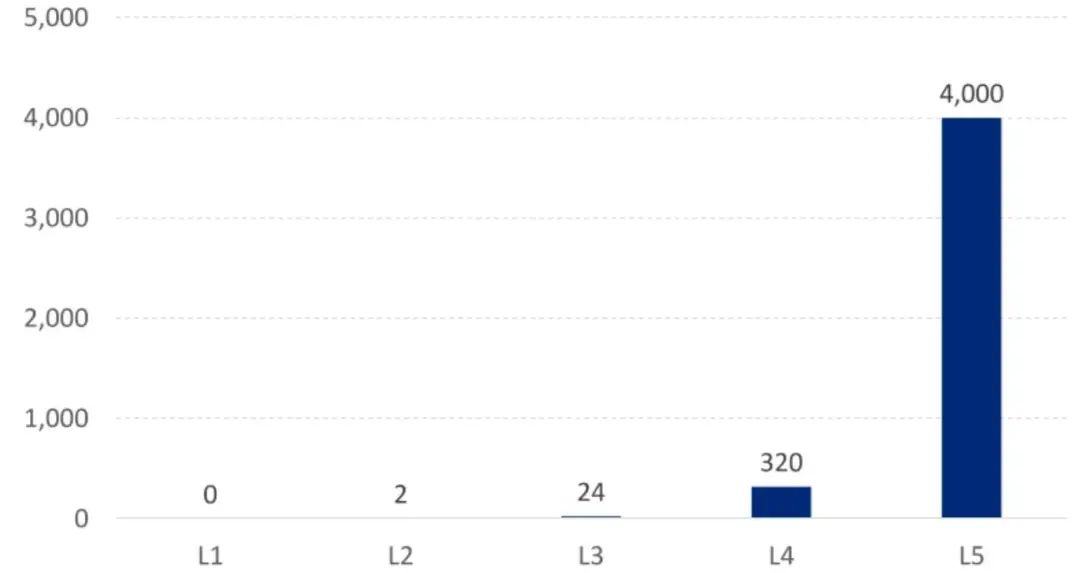
(來(lái)源:東興證券研究所)
而相比來(lái)說(shuō),車路協(xié)同中的計(jì)算可以運(yùn)用邊緣計(jì)算和云計(jì)算技術(shù),調(diào)用海量的算力來(lái)完成這些復(fù)雜運(yùn)算,而不會(huì)受制于單車的算力。
不僅如此,車路協(xié)同算力設(shè)備部署更為穩(wěn)定,不受行車規(guī)則的限制,光纖通信可實(shí)時(shí)調(diào)用海量算力把車端路端算法互相反饋測(cè)試來(lái)驗(yàn)證結(jié)果。這些也都是單車智能在算力上所不具備的優(yōu)勢(shì)。
除了安全,還是安全
就像剛才提到的那樣,車路協(xié)同除了能能讓車「認(rèn)路」以外,最厲害的一點(diǎn)就是有能力解決自動(dòng)駕駛面臨的最大挑戰(zhàn):安全問(wèn)題。
尤其是自動(dòng)駕駛的概念越來(lái)越普及的現(xiàn)在,由輔助駕駛引起的事故也越來(lái)越多。
2020年6月一輛特斯拉Model 3在高速上徑直撞向一輛翻倒的卡車。
即便當(dāng)時(shí)視野開(kāi)闊且光線良好,然而AutoPilot依然沒(méi)有成功識(shí)別出來(lái)前方靜止的障礙物。

這實(shí)際就是單車智能在安全問(wèn)題上遇到的瓶頸。
比如說(shuō)被遮擋住的「STOP」指示牌,對(duì)于人類駕駛員來(lái)說(shuō),基本上可以輕松識(shí)別并很快作出行動(dòng)反應(yīng)。
但對(duì)單車智能來(lái)說(shuō),在有足夠的數(shù)據(jù)和信息、并且系統(tǒng)足夠優(yōu)化之前,這些符號(hào)是難以識(shí)別的,畢竟它看到的不是具體的「STOP」,而是一堆無(wú)意義的數(shù)字代碼。

車路協(xié)同所具備的信息收集和分析優(yōu)勢(shì)使得車路協(xié)同在安全性的保證上可以引入「多余度」的概念。
多余度一詞源自飛機(jī)的設(shè)計(jì)之中,該技術(shù)通過(guò)使用多個(gè)相同的功能單元和模塊來(lái)接受相同的信息。當(dāng)主單元故障時(shí),便會(huì)切換至備份單元工作,保障飛機(jī)的安全運(yùn)行。
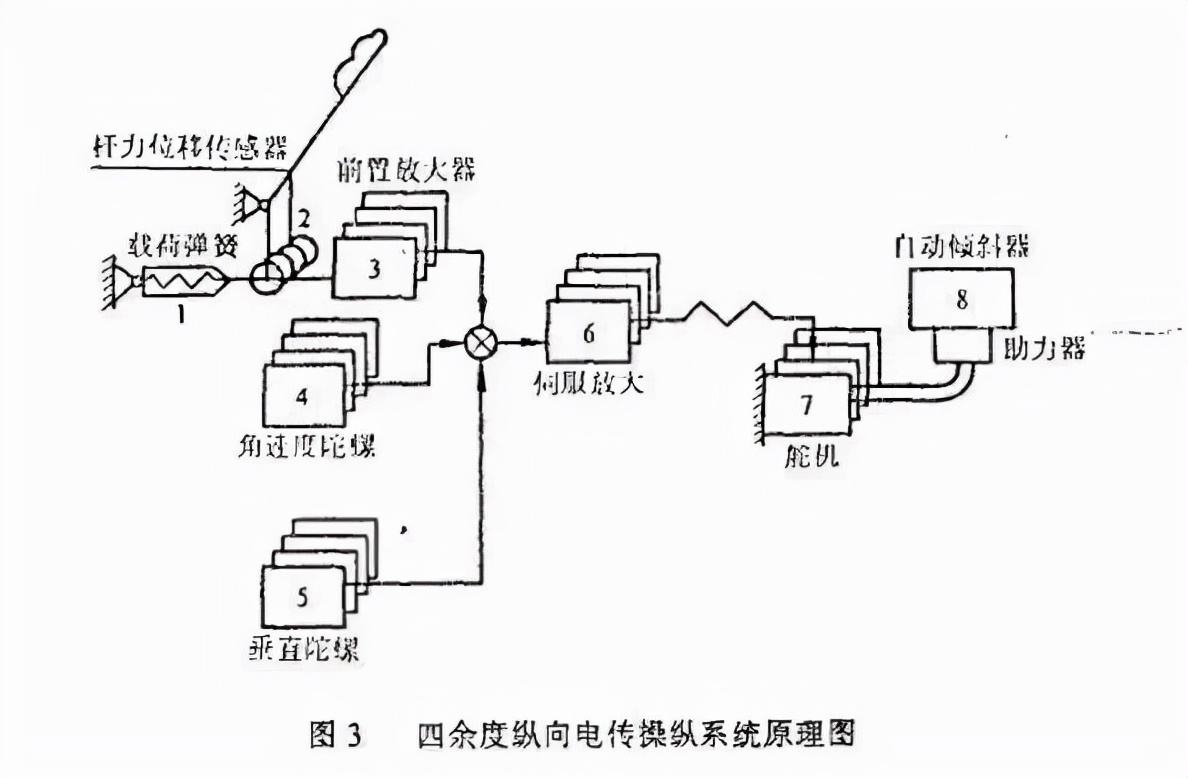
對(duì)于車路協(xié)同來(lái)說(shuō),多余度就是利用道路交通各參與方來(lái)進(jìn)行多維度的感知、跟蹤、預(yù)測(cè)和學(xué)習(xí)。
通過(guò)路端的感知,以及車、路之間的信息共享,不僅可以補(bǔ)足車端感知視距有限、感知存在盲區(qū)等問(wèn)題,特別能夠?qū)崿F(xiàn)對(duì)于其他交通參與者行為的預(yù)測(cè)和判斷。
比如,行人的「鬼探頭」、路口有車輛突然竄出、同一條道路其他車輛的不規(guī)范行駛,甚至在無(wú)紅綠燈路口交警現(xiàn)場(chǎng)指控交通時(shí)的命令等都可以由「路端」感知后提前預(yù)測(cè)判斷,然后再把信號(hào)無(wú)延遲地傳送給車輛端。

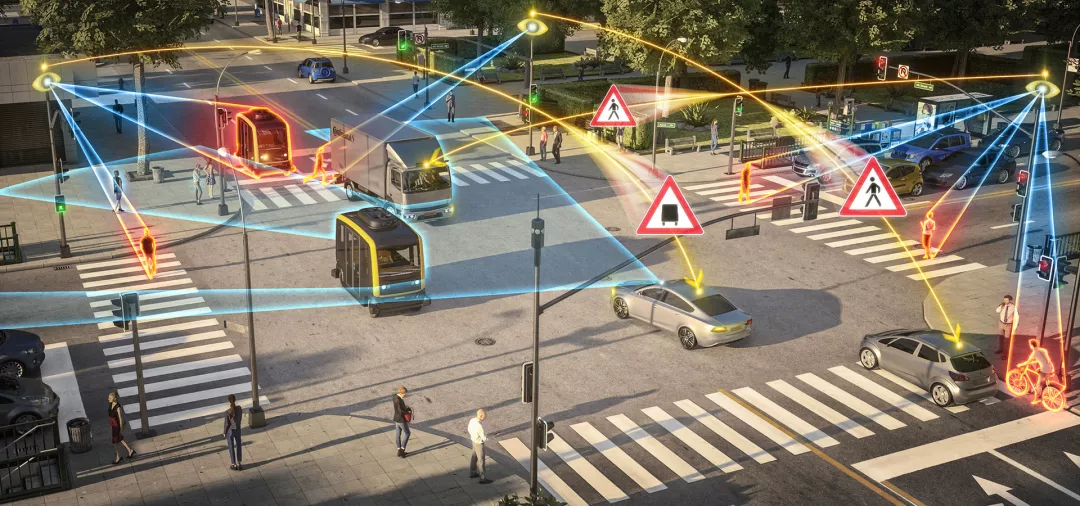
這就像是給單點(diǎn)智能的車加裝上全天候、全場(chǎng)景、360度的「千里眼」和統(tǒng)籌全局的「智慧腦」, 實(shí)現(xiàn)車、路、人、基礎(chǔ)設(shè)施的萬(wàn)物互聯(lián)和萬(wàn)物互控。
未來(lái),每輛車都將成為信息的接收者、中轉(zhuǎn)者、處理者和發(fā)出者,全局調(diào)配將在一張城市智慧網(wǎng)上運(yùn)行,實(shí)現(xiàn)對(duì)信息的多重采集和判斷,從而實(shí)現(xiàn)無(wú)人駕駛安全性上指數(shù)級(jí)的提升。

盲區(qū)預(yù)警
中國(guó)無(wú)人駕駛特色道路怎么走?
2019年可以說(shuō)是個(gè)分水嶺,中美兩國(guó)在智能駕駛的發(fā)展上選擇了不同的方向。
美國(guó)一如既往走在「單車智能」的道路上。而在中國(guó),車路協(xié)同越來(lái)越成為無(wú)人駕駛一個(gè)更為可靠的實(shí)現(xiàn)路徑。
首先,從地理環(huán)境來(lái)看,美國(guó)地廣人稀,交通環(huán)境相對(duì)單一,即便是不太精確的單車智能就有可能實(shí)現(xiàn)輔助駕駛的目的。
反觀國(guó)內(nèi),人口密度大且集中,交通環(huán)境復(fù)雜,對(duì)自動(dòng)駕駛的要求相對(duì)更高,依靠單車智能很難實(shí)現(xiàn)高級(jí)別的自動(dòng)駕駛,而車路協(xié)同則提供了一個(gè)好的解決方案。
其次,基礎(chǔ)設(shè)施投入建設(shè)也很重要。高寬帶、低時(shí)延、廣連接等特性的5G才足以支撐車路協(xié)同的發(fā)展。
最新數(shù)據(jù)顯示,中國(guó)目前已累計(jì)建成5G基站超91.6萬(wàn)個(gè),在全球占比約為70%。
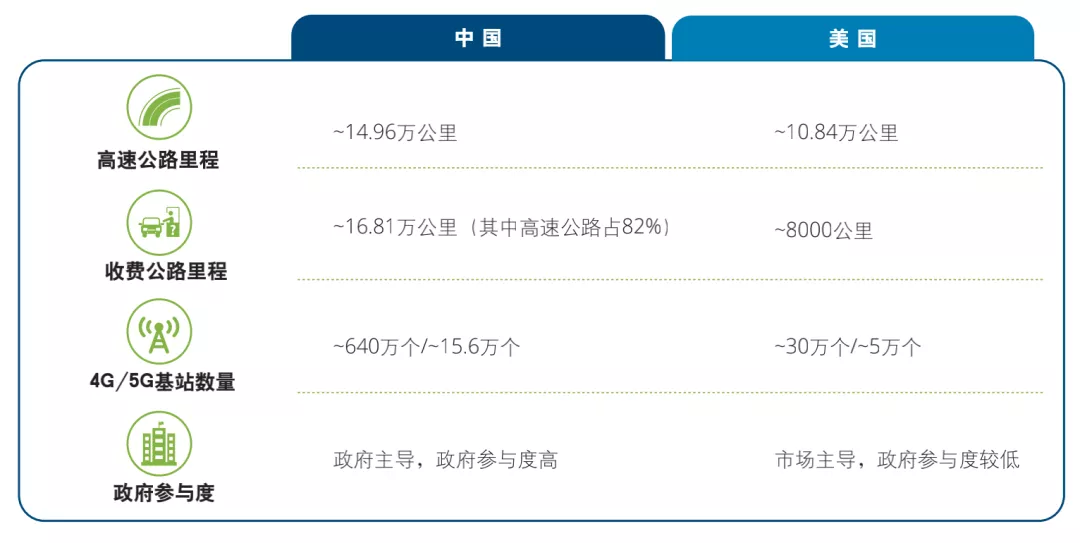
中美車路協(xié)同基礎(chǔ)設(shè)施對(duì)比 (來(lái)源:德勤分析)
最后,中國(guó)實(shí)現(xiàn)車協(xié)同具備巨大的規(guī)模優(yōu)勢(shì)。相比于單車智能方案中每一輛車都必須配備復(fù)雜且昂貴的傳感器和計(jì)算單元設(shè)備的巨大投入,車路協(xié)同只需要I4級(jí)別的道路和L2級(jí)別的車輛即可實(shí)現(xiàn)高級(jí)別的無(wú)人駕駛。
從中國(guó)的汽車保有量和龐大的路網(wǎng)布局來(lái)看,規(guī)模化的發(fā)展將使改造成本不斷降低。在中國(guó)以車路協(xié)同技術(shù)來(lái)實(shí)現(xiàn)L4級(jí)別的無(wú)人駕駛方案,從總投入來(lái)看,成本甚至不到單車智能的一半。
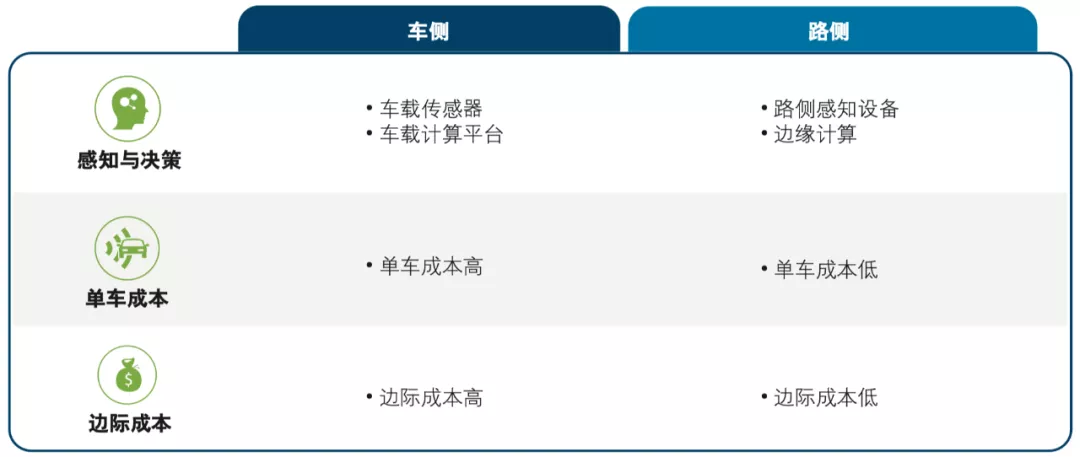
(來(lái)源:德勤分析)
正是這種優(yōu)勢(shì)使得「車路協(xié)同決定中國(guó)無(wú)人駕駛的成敗」的觀念基本上已經(jīng)成了包括產(chǎn)業(yè)政策制定者在內(nèi)的行業(yè)參與者的共識(shí),一些先行者已經(jīng)在車路協(xié)同無(wú)人駕駛的道路上實(shí)現(xiàn)了突破。

2021年「新四跨」演示車輛
中智行All in車路協(xié)同
在蘇州市相城區(qū),有一條高標(biāo)準(zhǔn)的車路協(xié)同測(cè)試路段,在這條路段上,依靠車、路、云配合的高等級(jí)無(wú)人駕駛路測(cè)已經(jīng)取得了實(shí)質(zhì)性突破。
實(shí)現(xiàn)了這種突破的中智行科技有限公司是一家專注于車路協(xié)同的公司。在2021年9月份,這家公司剛剛和中國(guó)電信、蘇州市政府一起成立了一家名為天翼交通的公司來(lái)共同推進(jìn)車路協(xié)同在中國(guó)的落地。
車路協(xié)同無(wú)人駕駛車輛正在測(cè)試
這實(shí)際上也是中國(guó)優(yōu)勢(shì)在車路協(xié)同中的一種具體體現(xiàn):中國(guó)電信擁有5G基建和信息處理能力;蘇州市政府具備基建優(yōu)勢(shì)和政策支持;而中智行則是中國(guó)唯一實(shí)現(xiàn)車、路、云全棧技術(shù)架構(gòu)的公司,在無(wú)人駕駛的核心技術(shù)指標(biāo)上位于全球前列。
在實(shí)現(xiàn)了核心技術(shù)上的突破后,車路協(xié)同接下來(lái)的方向就是城市級(jí)的應(yīng)用,這其中雖然還有大量的工作要做,但已經(jīng)度過(guò)了「從0到1」的起步階段。
中智行公司創(chuàng)始人王勁
中智行的創(chuàng)始人王勁曾創(chuàng)立了中國(guó)第一個(gè)(全球第二個(gè))L4級(jí)全無(wú)人駕駛團(tuán)隊(duì),他對(duì)車路協(xié)同城市級(jí)應(yīng)用的理解是:「車路協(xié)同的發(fā)展必然路徑就是:先進(jìn)行小規(guī)模實(shí)驗(yàn),成功之后再進(jìn)行大規(guī)模實(shí)驗(yàn),然后再不斷鋪開(kāi)。」
實(shí)際上,全國(guó)各地城市智慧道路的建設(shè)正在持續(xù)地推進(jìn),除了蘇州外,中智行正在和多地政府進(jìn)行車路協(xié)同的落地對(duì)接。
在計(jì)劃中,中智行將會(huì)在2025年前在兩個(gè)二線城市和5個(gè)三線城市中完成智慧道路的鋪設(shè)。
可以預(yù)見(jiàn)的是,在技術(shù)不斷突破和基建標(biāo)準(zhǔn)越來(lái)越清晰的情況下,城市級(jí)應(yīng)用的推廣速度將會(huì)越來(lái)越快。
All in車路協(xié)同,或許是未來(lái)交通發(fā)展的一個(gè)充滿潛力的選擇。













