機器人會模仿人類微笑了,但我總覺得這笑容……
本文經AI新媒體量子位(公眾號ID:QbitAI)授權轉載,轉載請聯系出處。
機器人只能用一張撲克臉、上面兩只空洞的塑料珠子來面對人類嗎?
不一定,它也可以沖你微笑!
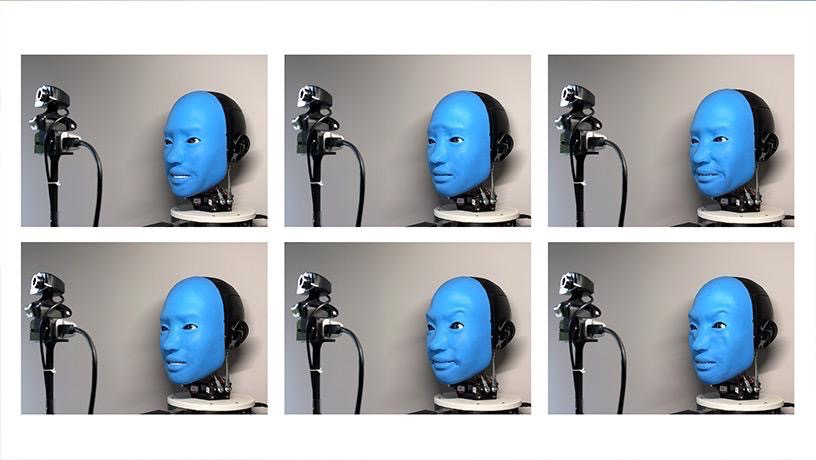
下面這個擁有著柔軟面部的“小藍人”,可以模仿人類的微笑等表情。
就像這樣:
“尬笑”、“齜牙咧嘴”……一改機器人“冷若冰霜、呆若木雞”的形象。
可一向由金屬或硬塑料制成的機器人,是如何露出微笑的呢?
由線和電機組成的人造“肌肉”
哥倫比亞大學(Columbia Engineering)創意機器實驗室(Creative Machines Lab)的研究人員一直對機器人與人類之間的互動感興趣。
面部表情在建立信任方面發揮著巨大作用,隨著機器人已經被越來越多地用于療養院、醫院等與人類緊密合作的地方,相比“冷冰冰”,我們更需要靈敏、有“溫度”的機器人。
于是,研究人員花了五年時間來創造上面這個可以模仿人類表情、叫做 EVA的機器人。
EVA的機械設計含以下四個模塊,如下圖:
A為電機伺服模塊(motor servo module ),EVA就是由它驅動,該模塊通過底部的樹莓派4控制。“皮膚”通過尼龍繩與10個電機相連,以受到控制作出相應表情。
B為有6個轉動角度的自由度的眼睛模塊,與前顱骨分離。
C為RGB攝像機,用于人表情的隨機數據采集。
D為6自由度的頸部模塊。

其中,要想在機器人整個頭部設計出一個足夠緊湊的系統以適應人類頭骨的大小,同時仍然具有足夠的功能以產生各種面部表情可不容易。
里面要塞下電路、傳感器和電機(motor)等各種體積不小的玩意兒。
為此,研究人員決定用3D 打印來制造形狀復雜的零件,讓這些零件在EVA 的腦瓜里無縫地集成在一起。
EVA通過由尼龍繩和電機(cables and motors)組成的人工“肌肉”,拉動臉上的特定點,模仿人類面部皮膚和骨骼上不同部位的42多塊細小肌肉的運動,來表達憤怒、厭惡、恐懼、喜悅、悲傷和驚訝六種基本情緒,甚至更細微的表情。
“有一天,當 EVA 突然給我一個大大的、友好的微笑時,我正忙著自己的事情,我知道這純粹是機械性的,但我發現自己條件反射地回以微笑。”
深度學習“閱讀”人類表情,作出反應
上面的機械設計,表明EVA這個機器人在物理上具備作出各種表情的能力。那它又是如何自主完成模仿的呢?
下面就來揭開這款機器人的軟件部分。
由于人類面部表情太復雜,預先設定好的規則根本不夠隨機應變,研究人員利用幾個深度學習神經網絡構建了EVA的“大腦”。
這個大腦需掌握兩種能力:一是通過“閱讀”人類的臉知道自己要做哪些表情;二是能把這些表情通過控制面部“肌肉”而呈現出來。
為了教EVA認清自己的“臉”是什么樣子,團隊拍攝了數小時它做各種“鬼臉”的視頻。
眉毛也可以動~
然后,就像一個人類在Zoom視頻軟件里看著自己一樣,EVA的內部神經網絡學會了將肌肉運動和視頻片段中自己的臉“配對”。
EVA對自己的臉是如何“運動”有了原始的感覺后,讓它將自己與攝像機拍攝的人臉表情匹配上也就不難了。
經過多次改進和迭代,EVA終于獲得了從相機讀取人臉“姿勢”的能力,并通過模仿人類面部表情來做出反應。
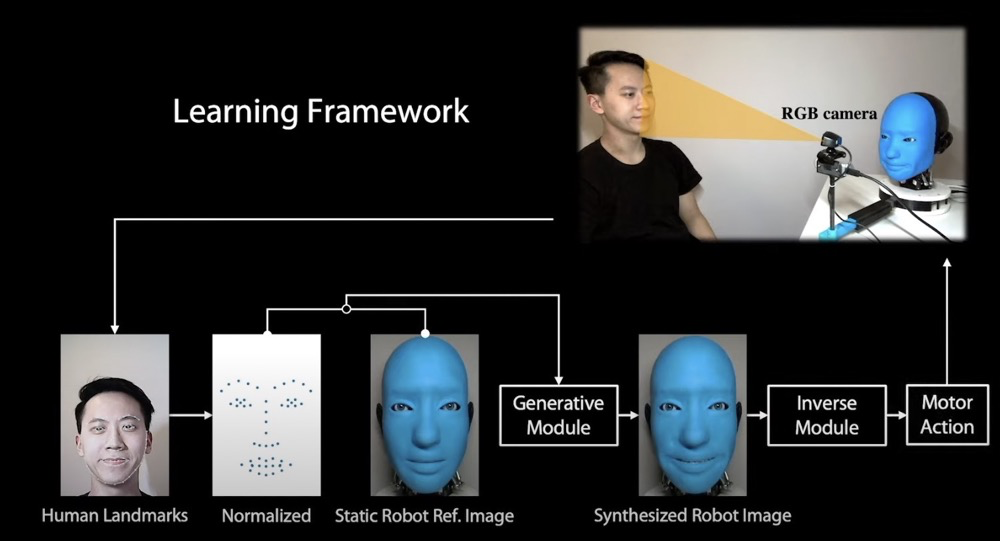
整個模仿過程如下:
EVA的大腦主要有兩個神經網絡:生成網絡和逆生成網絡(inverse network)。
給定一幅由普通RGB相機拍攝的人臉圖像后,系統首先用OpenPose提取面部標志。
OpenPose,人體姿態識別項目是美國卡耐基梅隆大學(CMU)基于卷積神經網絡和監督學習并以caffe為框架開發的開源庫。
然后將人臉面部標志標準化為機器人尺寸,將它與靜態機器人臉圖像連接到生成網絡,生成合成表情后的機器人圖像。
逆生成網絡以該圖像為基礎,輸出電機指令讓機器人執行,最終機器人臉上浮現出人類表情。
再來看一組EVA的模仿:
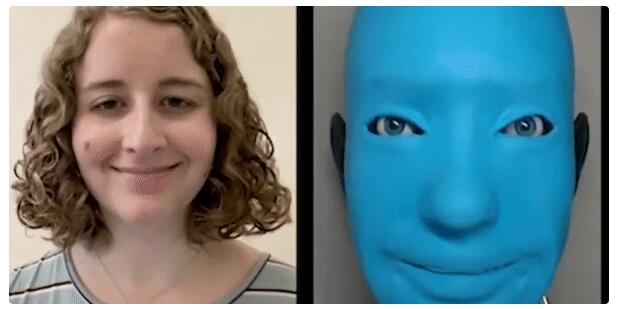
發現EVA還會眨眼睛、扭脖子,但是從正面看的話表情還是有點僵硬。
研究人員指出,EVA 還只是一項實驗室實驗,只會模仿,也與真正和人類進行面部表情交流還相去甚遠。但他們相信這種技術終有一天會在現實世界中產生有益的應用。
該研究于 2021 年 5 月 30 日在 ICRA 會議上發表,機器人的藍圖已在 Hardware-X(2021 年 4 月)開源。
關于作者
此次EVA機器人的研究團隊主要成員一共5人,其中3名華人。
機器人軟件部分的項目領導人為Chen Boyuan,吉大本科畢業,現哥倫比亞大學博士生,專業計算機科學與技術,研究方向:機器人、計算機視覺、機器學習。
文中出鏡的小哥胡宇航 ,也是哥倫比亞大學的博士生。本科畢業于廈門大學嘉庚學院,本科期間就申請了多項國家專利,還開了公司,被稱為“科創達人”。
Li Lianfeng, 哥倫比亞大學機器人技術與控制機械工程碩士。
論文地址:https://arxiv.org/abs/2105.12724
項目網站:http://www.cs.columbia.edu/~bchen/aiface/