













阿里達(dá)摩院突破自動駕駛技術(shù)難題:實現(xiàn)3D物體檢測精度速度兼得
本文經(jīng)AI新媒體量子位(公眾號ID:QbitAI)授權(quán)轉(zhuǎn)載,轉(zhuǎn)載請聯(lián)系出處。
最新消息,阿里達(dá)摩院又有新的研究進(jìn)展,這次在自動駕駛3D物體檢測領(lǐng)域。
達(dá)摩院的研究人員提出一個通用、高性能的檢測器,在自動駕駛領(lǐng)域最重要的測試集之一 KITTI的鳥瞰(BEV)數(shù)據(jù)集上,檢測速度達(dá)到25FPS ,一舉占據(jù)榜首,與排名第二的方案相比,減少了一半多,同時精度也遠(yuǎn)超其他的單階段檢測器。可以說首次實現(xiàn)3D物體檢測精度與速度兼得。

達(dá)摩院研究團隊表示:“檢測器是自動駕駛系統(tǒng)的核心組件之一,但該領(lǐng)域一直缺少創(chuàng)新和突破,此次我們實現(xiàn)3D檢測精讀和速度的提升,將有助于提高自動駕駛系統(tǒng)的安全性。”
從實驗結(jié)果來看,他們顯然取得了良好進(jìn)展,而且研究的主要完成人員(一作),還是一名達(dá)摩院的實習(xí)生。
同時,該研究也得到了同行們的認(rèn)可,被計算機視覺領(lǐng)域頂級會議CVPR 2020收錄。他們是如何做到的呢?我們借助阿里達(dá)摩院提供的解讀,一一來看。
如何實現(xiàn)精度和速度兼得?
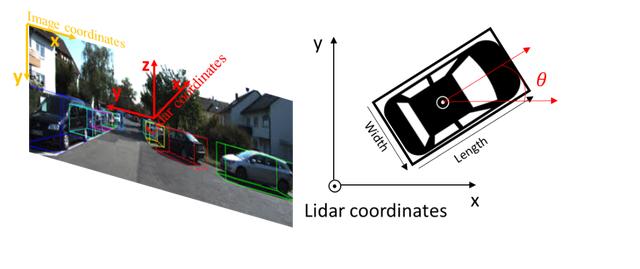
眾所周知,與普通2D圖像識別應(yīng)用不同,自動駕駛系統(tǒng)對精度和速度的要求更高,不僅需要快速識別周圍環(huán)境的物體,還要對物體在三維空間中的位置做精準(zhǔn)定位。
僅靠傳感器和算法模型,通常無法平衡視覺識別的精度和速度。因此,檢測器成為提升自動駕駛系統(tǒng)安全性的一個關(guān)鍵因素。
經(jīng)過多年研究,當(dāng)前業(yè)界主流的單階段檢測器在檢測速度上很好,但在檢測精度卻差強人意。
這就是達(dá)摩院研究的出發(fā)點:尋找一種能二者兼得的方法。
他們提出的思路是:將兩階段檢測器中對特征進(jìn)行細(xì)粒度刻畫的思想,移植到單階段檢測中。
在他們的模型中,用于部署的檢測器, 即推斷網(wǎng)絡(luò), 由一個骨干網(wǎng)絡(luò)和檢測頭組成。
骨干網(wǎng)絡(luò)用3D的稀疏網(wǎng)絡(luò)實現(xiàn),用于提取含有高語義的體素特征。檢測頭將體素特征壓縮成鳥瞰圖表示,并在上面運行2D全卷積網(wǎng)絡(luò)來預(yù)測3D物體框。
他們在訓(xùn)練中利用一個輔助網(wǎng)絡(luò)將單階段檢測器中的體素特征,轉(zhuǎn)化為點級特征并施加一定的監(jiān)督信號。
在實現(xiàn)上,他們將卷積特征中的非零信號映射到原始的點云空間中, 然后在每個點上進(jìn)行插值,來獲取卷積特征的點級表示。使得卷積特征也具有結(jié)構(gòu)感知能力,來提高檢測精度。
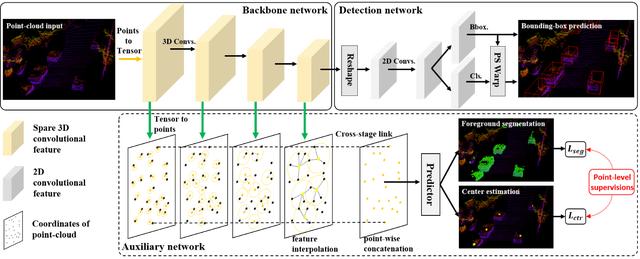
而在做模型推斷時,輔助網(wǎng)絡(luò)并不參與計算(detached),保證單階段檢測器的檢測效率。
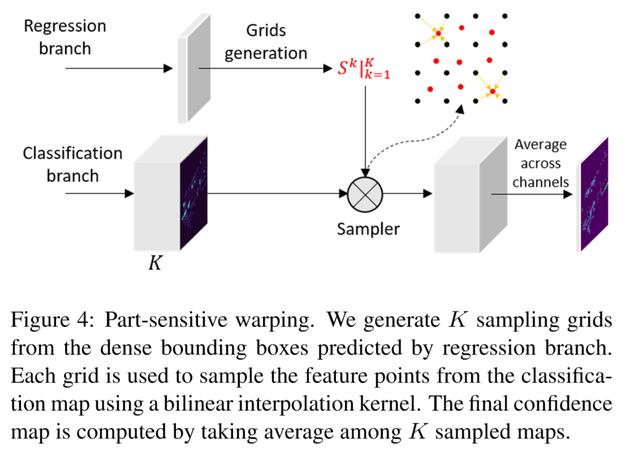
另外,他們還提出一個工程上的改進(jìn):Part-sensitive Warping (PSWarp),用于處理單階段檢測器中存在的 “框-置信度-不匹配” 問題。
核心思路是:利用采樣器, 用生成的采樣網(wǎng)格在對應(yīng)的局部敏感特征圖上進(jìn)行采樣,生成對齊好的特征圖。最終能反映置信度的特征圖,是K個對齊好特征圖的平均。
單階段方法,能達(dá)到兩階段方法精度
阿里達(dá)摩院的研究人員,在KITTI數(shù)據(jù)集上評估了方法的有效性。下圖(PR Curve)中,實線為兩階段方法, 虛線為單階段方法。
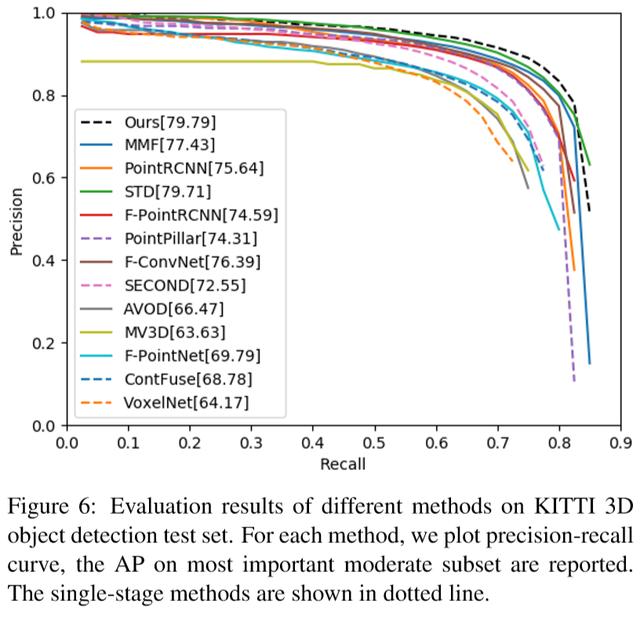
可以看出,達(dá)摩院提出的單階段方法(黑色)能夠達(dá)到兩階段方法才能達(dá)到的精度。
下圖展示了他們在KITTI 鳥瞰(BEV) 和 3D 測試集上的結(jié)果。
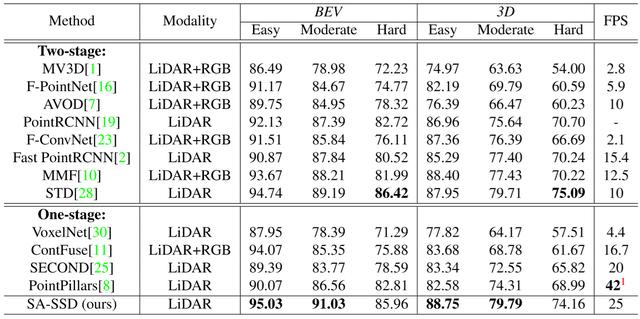
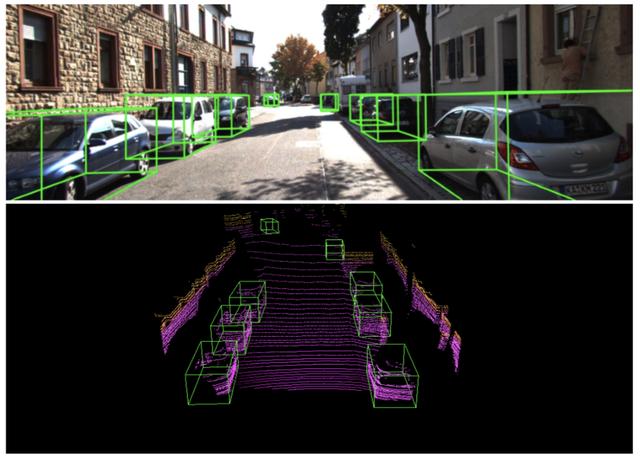
可以看出,他們提出的方法,可以在不增加額外計算量的情況下,達(dá)到25FPS 的檢測速度,而且還能保持精度。具體的檢測效果如下:
兩位共同一作,都是達(dá)摩院研究實習(xí)生
研究論文,標(biāo)題為“Structure Aware Single-Stage 3D Object Detection from Point Cloud”,共有5名研究人員參與,分別來自阿里達(dá)摩院和香港理工大學(xué)。
第一作者是Chenhang He,是阿里達(dá)摩院的研究實習(xí)生,正在香港理工大學(xué)讀博,預(yù)計2022年畢業(yè)。
他的導(dǎo)師是達(dá)摩院高級研究員、香港理工大學(xué)電子計算學(xué)系講座教授、IEEE Fellow張磊,也是這一研究的通訊作者。
另一位第一作者Hui Zeng,也是是阿里達(dá)摩院的研究實習(xí)生,同樣是張磊的博士生,預(yù)計在今年畢業(yè)。
其他作者,分別是達(dá)摩院高級研究員、IEEE Fellow華先勝、達(dá)摩院資深算法專家黃建強等。

























