不再強依賴 3D 地圖導航,自動駕駛技術跨入新領域
作者:開源中國編譯
當下的自動駕駛汽車技術嚴重依賴超詳細的 3D 地圖進行導航,幾乎所有地圖都是針對主要城市的,地圖制制人員和自動駕駛汽車開發(fā)商似乎不愿意繪制農村地區(qū)的地圖。
當下的自動駕駛汽車技術嚴重依賴超詳細的 3D 地圖進行導航,幾乎所有地圖都是針對主要城市的,地圖制制人員和自動駕駛汽車開發(fā)商似乎不愿意繪制農村地區(qū)的地圖。除了缺乏專門的繪制人員與投資,郊區(qū)和農村地區(qū)的照明、標牌和道路指示也往往不夠理想,這對于目前的大多數(shù)自動駕駛汽車來說是一大挑戰(zhàn)。
近日,據(jù)外媒報道,麻省理工學院計算機科學和人工智能實驗室(CSAIL)的研究人員開發(fā)了一款自動駕駛軟件 MapLite,它不需要依賴詳細的 3D 地圖信息,從而可以使得自動駕駛技術在城區(qū)之外,在那些不能準確提供超詳細 3D 地圖的地區(qū)也能起到很好的作用。
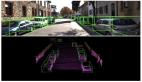
MapLite 使用激光雷達傳感器結合 IMU 和基本地圖數(shù)據(jù)在農村道路上提供自駕功能,與一般手機導航軟件相似,它可以根據(jù)傳感器輸入和基本 GPS 數(shù)據(jù)進行導航。具體來講,MapLite 使用激光雷達和慣性傳感器來幫助預測車輛前方100英尺處的道路狀況,并根據(jù)基本的 GPS 數(shù)據(jù)檢查這些數(shù)據(jù)以給予指導。該系統(tǒng)比其他系統(tǒng)復雜得多,CSAIL 的研究生 Teddy Ort 表示:
這種“無地圖”的方法是***的,如果想要達到與以往依賴 3D 地圖的導航同等的準確性和可靠性,那么它的難度大了很多。MapLite 的出現(xiàn),表明僅使用車載傳感器,而不高度依賴 3D 地圖進行導航是可行的。
MapLite 仍處于開發(fā)階段,目前已在一輛改裝豐田上進行測試,結果較為理想,目前已顯示出了很大的潛力。
責任編輯:張燕妮
來源:
cnet