













從淺層模型到深度模型:概覽機器學習優(yōu)化算法

論文鏈接:https://arxiv.org/abs/1706.10207
摘要:本篇論文旨在介紹關(guān)于將最優(yōu)化方法應用于機器學習的關(guān)鍵模型、算法、以及一些開放性問題。這篇論文是寫給有一定知識儲備的讀者,尤其是那些熟悉基礎優(yōu)化算法但是不了解機器學習的讀者。首先,我們推導出一個監(jiān)督學習問題的公式,并說明它是如何基于上下文和基本假設產(chǎn)生各種優(yōu)化問題。然后,我們討論這些優(yōu)化問題的一些顯著特征,重點討論 logistic 回歸和深層神經(jīng)網(wǎng)絡訓練的案例。本文的后半部分重點介紹幾種優(yōu)化算法,首先是凸 logistic 回歸,然后討論一階方法,包括了隨機梯度法(SGD)、方差縮減隨機方法(variance reducing stochastic method)和二階方法的使用。最后,我們將討論如何將這些方法應用于深層神經(jīng)網(wǎng)絡的訓練,并著重描述這些模型的復雜非凸結(jié)構(gòu)所帶來的困難。
1 引言
在過去二十年里,機器學習這一迷人的算法領(lǐng)域幾乎以史無前例的速度崛起。機器學習以統(tǒng)計學和計算機科學為基礎,以數(shù)學優(yōu)化方法為核心。事實上,近來優(yōu)化方法研究領(lǐng)域中的許多最新理論和實際進展都受到了機器學習和其它數(shù)據(jù)驅(qū)動的學科的影響。然而即使有這些聯(lián)系,統(tǒng)計學、計算機科學和致力于機器學習相關(guān)問題的優(yōu)化方法研究之間仍存在許多障礙。因此本文試圖概述機器學習學習算法而打破這種障礙。
本篇論文的目的是給出與機器學習領(lǐng)域相關(guān)的一些關(guān)鍵問題和研究問題的概述。考慮到涉及運籌學領(lǐng)域的知識,我們假設讀者熟悉基本的優(yōu)化方法理論,但是仍將引入在廣義機器學習領(lǐng)域使用的相關(guān)術(shù)語和概念,希望借此促進運籌學專家和其它貢獻領(lǐng)域的人員之間的溝通。為了實現(xiàn)這一目的,我們在詞匯表 1 中列出了本論文將介紹和使用的最重要的術(shù)語。
督機器學習的術(shù)語表(監(jiān)督機器學習的目的之一就是理解輸入空間 X 中每個輸入向量 x 和輸出空間 Y 中相應輸出向量 y 之間的關(guān)系)")
1.1 闡明動機
1.2 學習問題和優(yōu)化問題
1.3 學習邊界、過擬合和正則化
2 解決Logistic回歸問題的優(yōu)化方法(淺層模型的優(yōu)化方法)
當 L 和 r 是關(guān)于 w 的任意凸函數(shù)時,可以運用在本節(jié)中討論的方法來解決問題(11):

這一類中包含很多機器學習模型,包括支持向量機、Lasso(Least Absolute Shrinkage and Selection Operator)、稀疏逆協(xié)方差選擇等。有關(guān)這些模型的詳細信息請參見 [86] 和其中的參考文獻。為了每一步都能具體(展現(xiàn)出來),此處我們指定以二分類的正則化logistic回歸為例(進行講解)。為了簡化例子中的符號,我們作不失一般性的假設,令![]() 。(此處省去了偏置項 b0),這一省略操作可以通過在輸入向量上增加一維恒為 1 的特征值來彌補)。當 w 和 x 都是 d 維時就可以令其為特定的凸優(yōu)化問題。
。(此處省去了偏置項 b0),這一省略操作可以通過在輸入向量上增加一維恒為 1 的特征值來彌補)。當 w 和 x 都是 d 維時就可以令其為特定的凸優(yōu)化問題。

值得一提的是,對于此類問題,正則化項必不可少。想一想為什么說它必不可少,假設對于所有的 i ∈{1,...,n},有參數(shù)向量 w,滿足 yi(wT*xi) > 0 以及(存在)無界射線 {θw : θ > 0}。那問題就很明朗了,在這個例子中,當 θ →∞時,

也就是說函數(shù)(式 12)無法取最小值。另一方面,通過增加(強制)正則化函數(shù) r,可以保證問題(12)將具有最優(yōu)解。
對于正則化函數(shù) r,我們將會參考常用選擇 和 r(w) = ||w||1。不過為了簡單起見,我們通常會選擇前者,因為它使得公式 12 對于每一個因子是連續(xù)可微的。相反,r(w) = ||w||1 會導致非平滑問題,為此,(實現(xiàn))函數(shù)最小化就需要更復雜的算法。
和 r(w) = ||w||1。不過為了簡單起見,我們通常會選擇前者,因為它使得公式 12 對于每一個因子是連續(xù)可微的。相反,r(w) = ||w||1 會導致非平滑問題,為此,(實現(xiàn))函數(shù)最小化就需要更復雜的算法。
2.1 一階方法
我們首先討論用一階方法求解問題(12),這里的」一階」僅僅指對函數(shù) F 中的參數(shù)進行一階偏導的數(shù)學技巧。
2.1.1 梯度下降法
從概念上講,最小化光滑凸目標的最簡單的方法是梯度下降法,具體分析參見 [ 62 ]。在這種方法中,從初始化估計值 w0 開始,通過下述公式迭代地更新權(quán)重估計值。

其中 αk > 0 是一個步長參數(shù)。步長序列 {αk} 的選擇直接決定此算法的性能。在優(yōu)化研究領(lǐng)域,人們普遍認為,在每次迭代中采用線性搜索來確定 {αk },可以為解決各種類型的問題找到一個性能優(yōu)越的算法。然而,對于機器學習應用程序來說,這種運算成本高昂,因為每次函數(shù) F 的計算都需要傳遞整個數(shù)據(jù)集,如果 n 過大,很可能帶來高昂的(訓練)成本。
好在當每個αk 都設置為一個正的常數(shù)α且它是一個足夠小的固定值時,從理論上分析,該算法的收斂性仍可以得到保證。(固定的步長常數(shù)在機器學習領(lǐng)域叫做學習率。但即使不是常數(shù),也有人把αK 或整個序列 {αK } 叫做學習率)。該算法的收斂速度取決于函數(shù) f 是強凸函數(shù)還是弱凸函數(shù)。
用于解決 L1 范數(shù)正則化的logistic回歸問題的梯度下降和加速梯度下降拓展算法分別被稱作 ISTA 和 FISTA。我們觀察到,在這種情況下,即使λ> 0,目標函數(shù)也不會是強凸函數(shù)。只有目標函數(shù)為凸時 [5],ISTA 和 FISTA 具有與其對應的平滑函數(shù)相同的次線性收斂速度。
梯度下降在 ML 訓練過程中的一個重要特性就是計算出每次迭代中求解函數(shù) F 的梯度的運算成本。在 ML 的訓練過程中,單個梯度計算的成本通常是 O(ND),這個確實可以看到,例如,在正則化項為 的情況中,函數(shù) F 關(guān)于每一個特定的 w 的梯度是
的情況中,函數(shù) F 關(guān)于每一個特定的 w 的梯度是

2.1.2 隨機梯度法
隨機梯度法由于其用于最小化隨機目標函數(shù)而在運籌學領(lǐng)域廣為人知,同時也是 ML 社區(qū)中的一種特征優(yōu)化算法。該算法最初由 Robbins 和 Monro [ 67 ] 在解決隨機方程組問題時提出,值得注意的是,它可以用于最小化具有良好收斂性的隨機目標,而且每次迭代的計算復雜度僅為 O(d)而不是 O(nd)(梯度下降中的計算復雜度)。
在每一次迭代中,隨機梯度法都會計算梯度 F(Wk)的無偏估計 GK。該估計可以以及低的代價計算得到;例如,對于公式(12),某次迭代的隨機梯度可被求解為

其中 Sk 被稱作小批量,它的所有元素都是從總數(shù)據(jù)集 {1,...,n} 中按均勻分布選出來的。接下來的運算類似于梯度下降:

毫無疑問,該算法的關(guān)鍵在于選擇步長序列 {αk}。不同于梯度下降,固定的步長(即學習率)不能保證算法會收斂到強凸函數(shù) F 的最小值,而只保證收斂到最小值的鄰域。
SGD 的收斂速度比梯度下降慢。尤其當函數(shù) F 是強凸函數(shù)時,該算法只保證當 k ≥ O(1/ε) 時可以得到預期精度的解(即滿足 E[F(wk)]-F(w) ≤ ε的解),而當函數(shù) F 僅僅是凸函數(shù)時,只有在 k ≥ O(1/ε^2) [11] 時才能保證得出上述解。
另一方面,正如前文提及的,如果 Sk 的大小由一個常數(shù)限定(獨立于 n 或 k 的常數(shù)),那么 SGD 的每次的迭代成本都比梯度下降法小 0(n)倍。
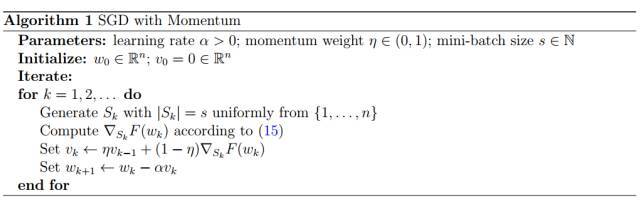
然而,在實際運用中,標準的 SGD 并不一定是解決機器學習中優(yōu)化問題的最有效方法。事實上,機器學習和優(yōu)化算法領(lǐng)域在開發(fā)改進或替代 SGD 方面進行了大量的積極研究。在隨后的兩部分中,我們將討論兩類方法:方差縮減法和二階方法。但是在這兩類方法以外,還有多種方法。例如,加有動量的 SGD 就是一個實踐中被發(fā)現(xiàn)的性能好于好于標準 SGD 的拓展版 SGD。見下圖算法 1
2.1.3 方差縮減法(Variance reducing method)
考慮到問題(11),人們發(fā)現(xiàn)通過利用目標 F 的結(jié)構(gòu)作為 n 個函數(shù)的有限和再加上簡單的凸函數(shù)項,可以改善 SGD 方法。目前已經(jīng)研究出幾種方法,如 SAG [74],SAGA [22],SDCA [76] 和 SVRG [44]。
為了方便引用,我們把 SVRG 叫做算法 2。該算法在每個外部迭代中執(zhí)行一次完整的梯度計算,然后沿著隨機方向再迭代 L 步,這是整個梯度的隨機修正過程。內(nèi)環(huán)步長 L(inner loop size)必須滿足一定的條件以保證收斂 [ 44 ]。
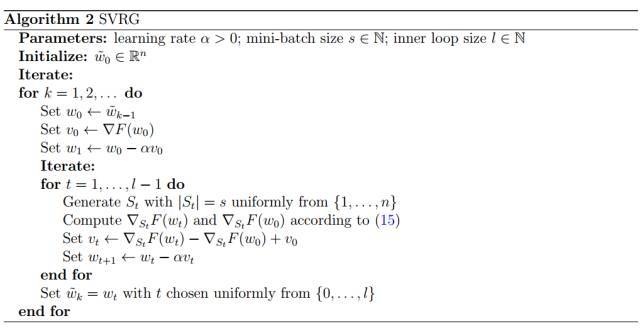
SVRG,全稱為隨機方差減小梯度,其名稱源自于該算法可以被視為 SGD 的方差減小變體(尤其是有限和最小化/finite-sum minimization)。
研究員通過結(jié)合 SVRG 和 SAGA 的一些思想,提出一個新的方法,叫做 SARAH。僅是內(nèi)層迭代步長不同于 SVRG,SARAH 的公式如下

該變化導致 ,使得 SARAH 中的步長不基于無偏梯度估計。不過,相對于 SVRG,它獲得了改進的收斂特性。
,使得 SARAH 中的步長不基于無偏梯度估計。不過,相對于 SVRG,它獲得了改進的收斂特性。
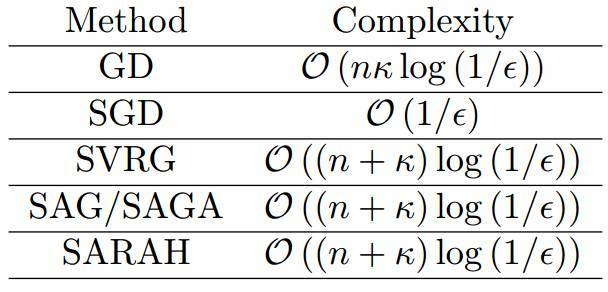
表 2 : 最小化強凸函數(shù)的一階方法計算復雜度
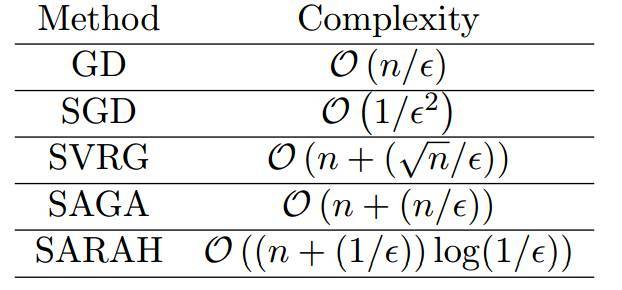
表 3 : 最小化一般凸函數(shù)的一階方法計算復雜度
2.2 二階方法和擬牛頓法
受確定性優(yōu)化研究領(lǐng)域幾十年研究成果的激勵,ML 優(yōu)化中最活躍的研究領(lǐng)域之一就是關(guān)于如何使用二階導數(shù)(即曲率)信息來加速訓練。
不幸的是,當 n 或 d 很大時,在機器學習應用程序中,海塞矩陣(Hessian matrix)的計算和存儲變得非常昂貴。
另一類基于形如(21)模型的算法是擬牛頓方法:

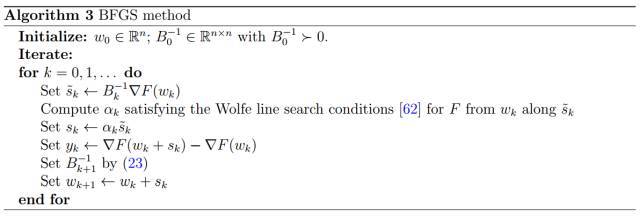
有趣的是,這些方法沒有計算出顯式二階導數(shù),而是通過在每次迭代中應用低秩更新構(gòu)造完全由一階導數(shù)的海塞近似矩陣。例如,讓我們簡要介紹最流行的擬牛頓算法,全稱為 Broyden-Fletcher-Goldfarb-Shanno(BFGS)方法。在這種方法中,我們首先可以看到(21)的最小值為、 進一步發(fā)現(xiàn)它實際上可以方便地計算出逆 Hessian 近似。由于
進一步發(fā)現(xiàn)它實際上可以方便地計算出逆 Hessian 近似。由于 隨著步長 sk = w_k+1 − wk 和位移 yk = ∇F(wk+1) − ∇F(wk) 的移動,有人選擇
隨著步長 sk = w_k+1 − wk 和位移 yk = ∇F(wk+1) − ∇F(wk) 的移動,有人選擇  以最小化
以最小化 以滿足割線方程 sk = (B^-1)yk。使用精心挑選的規(guī)范表達,這個問題的解析式可以顯示的寫成
以滿足割線方程 sk = (B^-1)yk。使用精心挑選的規(guī)范表達,這個問題的解析式可以顯示的寫成

其中 之間的差異可以僅表示為二階矩陣。
之間的差異可以僅表示為二階矩陣。
為方便引用,完整的經(jīng)典 BFGS 算法被稱為算法 3。
即使采用二階信息,隨機優(yōu)化方法(無差異減少)也無法達到比次線性更快的收斂速度。不過,使用二階信息是一個不錯的想法,因為如果海塞近似矩陣收斂于海塞矩陣的真實解,則可以減少收斂速度中的常數(shù),同時還可以減少病態(tài)(ill-conditioning)的影響。
不幸的是,盡管已經(jīng)觀察到了實際的效率提升,但在理論上還沒有一個真正的二階方法,可以實現(xiàn)這樣的提升。到目前為止,只要海塞(近似)矩陣保持良好特性,大多數(shù)實際的方法只能保證實現(xiàn) SGD 的收斂(速率)特性。例如,如果序列 {Bk}(不一定由 BFGS 更新生成)對所有 k 滿足:

此時 具有與 SGD 相同的收斂速度屬性。我們就 可以合理地假設這些限定適用于上述討論的方法,這些假設有適當?shù)谋U稀H欢跀M牛頓方法的背景下應該小心,其中隨機梯度估計可能與海塞近似相關(guān)。
具有與 SGD 相同的收斂速度屬性。我們就 可以合理地假設這些限定適用于上述討論的方法,這些假設有適當?shù)谋U稀H欢跀M牛頓方法的背景下應該小心,其中隨機梯度估計可能與海塞近似相關(guān)。
3 深度學習
沿著這些方向進行的主要進展包括深層神經(jīng)網(wǎng)絡(DNN)的運用。機器學習的一個相應的分支稱為深度學習(或分層學習),它代表了一類試圖通過使用包含連續(xù)線性和非線性變換的多層次深層圖來構(gòu)造數(shù)據(jù)中高層次抽象的算法 [6, 51, 73, 37, 38, 23]。近年來科學家們已經(jīng)研究了各種神經(jīng)網(wǎng)絡類型,包括全連接神經(jīng)網(wǎng)絡(FNN)[84,28],卷積神經(jīng)網(wǎng)絡(CNN)[50] 和循環(huán)神經(jīng)網(wǎng)絡(RNN)[41,57,52]。對于我們來說,將主要關(guān)注前兩類神經(jīng)網(wǎng)絡,同時留意其它網(wǎng)絡。
3.1 問題公式化
3.2 隨機梯度下降法
我們引用以下內(nèi)容來強調(diào)將優(yōu)化算法應用于訓練 DNN 的令人困惑的反應。首先,例如在 [11] 中,有一個結(jié)論表明,通過應用 SGD 來最小化非凸目標函數(shù)(一直從輸入×輸出空間繪制),可以保證預期梯度風險將消失,至少在一個子序列上是這樣,即: 。這一結(jié)論令人欣慰,這表明 SGD 可以實現(xiàn)與其他最先進的基于梯度的優(yōu)化算法類似的收斂保證。然而,盡管文獻中的種種保證是有局限性的; 畢竟,盡管許多基于梯度的優(yōu)化算法確保目標函數(shù)單調(diào)減少,但 SG 并不以這種方式計算。因此,如果一個子序列收斂到一個固定點,那么我們怎么能確定該點不是鞍點,或者是有誤差局部最小值,亦或是一些目標值比初始點差的最大值?事實上,我們并不能肯定。也就是說,SGD 方法通常擅長找到局部極小值,而不是全局最小值。另一方面,SGD 往往會在固定值附近減緩收斂速度,這可能會阻礙它在深度神經(jīng)網(wǎng)絡中發(fā)展。
。這一結(jié)論令人欣慰,這表明 SGD 可以實現(xiàn)與其他最先進的基于梯度的優(yōu)化算法類似的收斂保證。然而,盡管文獻中的種種保證是有局限性的; 畢竟,盡管許多基于梯度的優(yōu)化算法確保目標函數(shù)單調(diào)減少,但 SG 并不以這種方式計算。因此,如果一個子序列收斂到一個固定點,那么我們怎么能確定該點不是鞍點,或者是有誤差局部最小值,亦或是一些目標值比初始點差的最大值?事實上,我們并不能肯定。也就是說,SGD 方法通常擅長找到局部極小值,而不是全局最小值。另一方面,SGD 往往會在固定值附近減緩收斂速度,這可能會阻礙它在深度神經(jīng)網(wǎng)絡中發(fā)展。
一般來說,對于非凸問題,SGD 的收斂速度記錄在 [29,30],但是它們非常有限,特別是它們不適用于§1.3 中的討論。因此,我們不能以同樣的方式爭論 SGD 是機器學習中非凸優(yōu)化問題的最佳方法。此外,下式

中的學習界限是沒有用的,因為對于許多 DNN 和 CNN,由神經(jīng)網(wǎng)絡產(chǎn)生的分類的復雜度 C 比訓練樣本數(shù) n 大得多。事實上,在 [90] 中,經(jīng)驗表明,只有這些集合中的數(shù)據(jù)隨機擾動,神經(jīng)網(wǎng)絡才能輕易地超過典型的數(shù)據(jù)集類型。
3.3 海塞-自由優(yōu)化方法(Hessian-free method)
有研究者發(fā)現(xiàn)我們可以修改 DNN 的反向傳播算法來計算這樣的海塞-矢量乘積,因為它們可以被看作是方向?qū)?shù) [65]。計算這種乘積的復雜度只是比計算梯度多一個常數(shù)因子。所得到的類的方法通常被稱為海塞-自由優(yōu)化方法,因為當訪問和使用 Hessian 信息時,沒有顯式地存儲 Hessian 矩陣。
由于目標函數(shù)的非凸性,在 DNN 的情況中出現(xiàn)了其它的問題,真正的海塞矩陣可能不是正定矩陣。一般來說,在確定性優(yōu)化中,處理這個問題的兩種可能的方法是修改海森矩陣和運用置信域(trust region)方法。這兩種方法都在訓練 DNN 的情況中探討過,例如,在 [54,55] 中,提出了一種高斯牛頓法,其在(11)中函數(shù) F 的 Hessian 的公式中的第一項近似于 Hessian 矩陣(省略了正則化項)

其中 是關(guān)于第一個參數(shù)的損失函數(shù) l(·, ·) 的海塞矩陣,∇p(w, xi) 是 dy-維函數(shù) p(w, x) 對于權(quán)重 w 的雅可比式,∇^2 [pj (w, xi)] for all j ∈ {1, . . . , dy} 是關(guān)于 w 的按元素運算的海塞矩陣。
是關(guān)于第一個參數(shù)的損失函數(shù) l(·, ·) 的海塞矩陣,∇p(w, xi) 是 dy-維函數(shù) p(w, x) 對于權(quán)重 w 的雅可比式,∇^2 [pj (w, xi)] for all j ∈ {1, . . . , dy} 是關(guān)于 w 的按元素運算的海塞矩陣。
3.4 子采樣海森方法(Subsampled Hessian method)
最近,在一系列論文(3, 15, 34)中,研究員們利用一個很一般的隨機模型框架,對凸區(qū)域和非凸情形下的置信域、線搜索和自適應三次正則化方法進行了分析。在這項工作中,它表明,只要梯度和 Hessian 估計是足夠準確的一些正概率,使用隨機不精確梯度和 Hessian 信息的標準優(yōu)化方法就可以保留其收斂速度。
在機器學習和采樣 Hessian 和梯度的情況下,結(jié)果只要求| SK |必須選擇足夠大的相對于該算法采取的步驟的長度。例如,在 [ 3, 34 ],| SK |大小與置信域半徑的關(guān)系。需要注意的是,對于采樣的海塞矩陣,其對樣本集的大小要求比采樣的梯度要高得多,因此支持使用精確梯度的海塞估計的思想催生了強大的算法,它擁有強大理論支撐和良好的實踐高效性。


























