北航&滴滴!自動(dòng)駕駛汽車的運(yùn)動(dòng)預(yù)測(cè):綜述
摘要
本文介紹了自動(dòng)駕駛汽車的運(yùn)動(dòng)預(yù)測(cè):綜述。近年來(lái),自動(dòng)駕駛領(lǐng)域吸引了越來(lái)越多的關(guān)注。準(zhǔn)確預(yù)測(cè)各種交通參與者的未來(lái)行為對(duì)于自動(dòng)駕駛汽車(AVs)的決策是至關(guān)重要的。本文主要研究基于場(chǎng)景和基于感知的自動(dòng)駕駛汽車運(yùn)動(dòng)預(yù)測(cè)。本文提出了運(yùn)動(dòng)預(yù)測(cè)的形式化問題表述,并且總結(jié)了該研究領(lǐng)域面臨的主要挑戰(zhàn)。本文還詳細(xì)介紹了與該領(lǐng)域相關(guān)的代表性數(shù)據(jù)集和評(píng)估指標(biāo)。此外,本文將最近的研究分為兩個(gè)主要類別:監(jiān)督學(xué)習(xí)和自監(jiān)督學(xué)習(xí),它們反映了基于場(chǎng)景和基于感知的運(yùn)動(dòng)預(yù)測(cè)中不斷發(fā)展的范式。在監(jiān)督學(xué)習(xí)的背景下,本文深入檢驗(yàn)并且分析了該方法的每個(gè)關(guān)鍵元素。對(duì)于自監(jiān)督學(xué)習(xí),本文總結(jié)了常用的技術(shù)。最后,本文總結(jié)并且討論了潛在的研究方向,旨在推進(jìn)AV技術(shù)這一重要領(lǐng)域的發(fā)展。
主要貢獻(xiàn)
本文的貢獻(xiàn)總結(jié)如下:
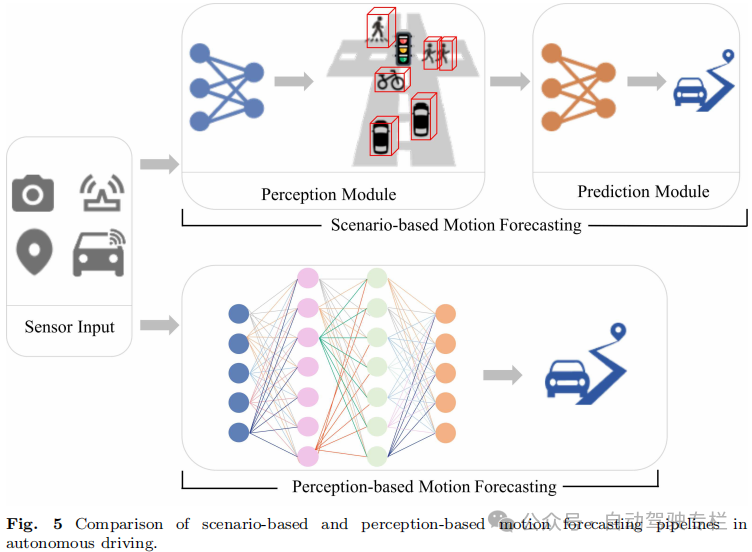
1)本文全面概述了自動(dòng)駕駛汽車運(yùn)動(dòng)預(yù)測(cè)的最新研究,涵蓋了基于場(chǎng)景和基于感知方法的通用流程;
2)本文總結(jié)并且討論了未來(lái)的研究方向,為推進(jìn)AV技術(shù)的發(fā)展做出了貢獻(xiàn)。
論文圖片和表格

總結(jié)
本文全面概述了自動(dòng)駕駛汽車運(yùn)動(dòng)預(yù)測(cè)的最新進(jìn)展。本文首先介紹了運(yùn)動(dòng)預(yù)測(cè)的表述,然后回顧了各種廣泛使用的數(shù)據(jù)集。接著,詳細(xì)解釋了專門為運(yùn)動(dòng)預(yù)測(cè)設(shè)計(jì)的評(píng)估指標(biāo)。最先進(jìn)的預(yù)測(cè)模型已經(jīng)取得了重大進(jìn)展,它們采用了注意力機(jī)制、GNNs、transformers和自監(jiān)督架構(gòu)等先進(jìn)技術(shù)。盡管這些技術(shù)取得了突破,但是該領(lǐng)域仍然面臨著重大挑戰(zhàn)。理解運(yùn)動(dòng)預(yù)測(cè)對(duì)于自動(dòng)駕駛至關(guān)重要,因?yàn)樗鼧O大地提高了道路場(chǎng)景的可解釋性,從而在提高未來(lái)自動(dòng)駕駛技術(shù)的安全標(biāo)準(zhǔn)方面發(fā)揮著重要作用。