













從扭秧歌到單腳跳,HugWBC讓人形機(jī)器人運(yùn)動天賦覺醒了
本項(xiàng)目由上海交通大學(xué)APEX實(shí)驗(yàn)室具身智能組和上海人工智能實(shí)驗(yàn)室具身智能中心共同完成。上海交通大學(xué)的張偉楠教授主要研究強(qiáng)化學(xué)習(xí)、智能體技術(shù)和具身智能。龐江淼博士主要研究機(jī)器人學(xué)習(xí),多模態(tài)學(xué)習(xí),具身智能,負(fù)責(zé)上海人工智能實(shí)驗(yàn)室具身智能中心;劉明桓博士畢業(yè)于上海交通大學(xué),目前在字節(jié)跳動機(jī)器人研究團(tuán)隊(duì)擔(dān)任研究科學(xué)家,研究機(jī)器人的虛擬現(xiàn)實(shí)遷移;薛宇斐和董文韜是上海交通大學(xué)博士生,同時是上海人工智能實(shí)驗(yàn)室的見習(xí)研究員。
在春晚上扭秧歌的機(jī)器人,現(xiàn)在也能跑跳自如了?

還能在室內(nèi)室外打一套拳擊,看這兩步跳的,害怕嗎?

它還能彎腰搬箱子:

來自上海交通大學(xué)和上海AI Lab的研究團(tuán)隊(duì)提出了一套通用的人形機(jī)器人控制器 HugWBC,讓人形機(jī)器人可以同時掌握多達(dá)四種步態(tài),以及可以自主組合、用于精細(xì)化調(diào)整機(jī)器人行為的 8 種命令!
- 項(xiàng)目主頁:https://hugwbc.github.io
- 論文地址:https://arxiv.org/abs/2502.03206
盡管此前的人形機(jī)器人在運(yùn)動上取得了很多令人驚嘆的結(jié)果,但離人類還差的多!人類在運(yùn)動中具有令人驚嘆的細(xì)粒度調(diào)整能力!比如,人類可以輕易實(shí)現(xiàn)多種步態(tài),例如跑步、雙腳跳躍、甚至單腳跳躍。此外,人類還能調(diào)整步伐的大小、頻率、身體的姿態(tài),同時也能保證上身各種動作的穩(wěn)定。因此,研究者提出思考,這種通用的控制能力,是否應(yīng)該被機(jī)器人的底層控制模塊所掌握?
和此前控制器只跟蹤速度指令、或是關(guān)鍵點(diǎn)不同,HugWBC 的研究團(tuán)隊(duì)提出了一套擴(kuò)展的指令空間,包含任務(wù)指令(即速度跟蹤)和行為指令,后者包括姿態(tài)、腳步和步態(tài),以提供細(xì)粒度的運(yùn)動控制,從而極大發(fā)揮人形機(jī)器人的硬件潛能。在默認(rèn)情況下,HugWBC 是一套全身控制器,同時控制上肢和下肢用于高動態(tài)運(yùn)動;與此同時,HugWBC 也提供了上肢的外部控制器介入,用于支持進(jìn)一步的遙操和精細(xì)控制,和實(shí)現(xiàn)后續(xù)的移動操作類任務(wù)。為了達(dá)到這一目標(biāo),研究者們結(jié)合了控制理論和強(qiáng)化學(xué)習(xí),進(jìn)行了扎實(shí)的方案設(shè)計(jì)。
擴(kuò)展的指令空間和步態(tài)獎勵
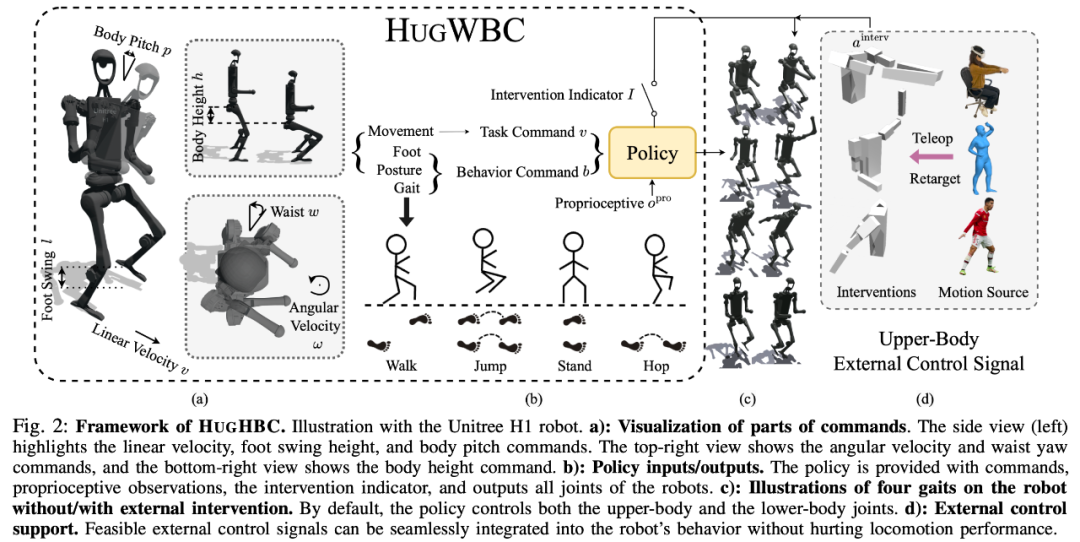
HugWBC 框架
HugWBC 引入的擴(kuò)展指令空間包括 1)任務(wù)指令,在本工作中主要是移動的速度指令;2)行為指令,包括腳步、姿態(tài)和步態(tài)指令。此外,控制器策略還接收機(jī)器人本體感知觀測和上肢介入信號,如無上肢介入,則控制器默認(rèn)控制全部關(guān)節(jié),實(shí)現(xiàn)自然的擺動。
具體來說,腳步指令包括步頻和最大擺動高度;姿態(tài)指令包括機(jī)器人高度、前傾角和腰部轉(zhuǎn)動角;步態(tài)指令則是產(chǎn)生不同類型步態(tài)的關(guān)鍵,主要由雙腳的相位變量(即雙腳在步態(tài)周期內(nèi)的進(jìn)度)、相位差(即雙腳在步態(tài)周期內(nèi)的進(jìn)度差)和占空比(即足部騰空時間占步態(tài)周期的比例)。通過組合這些指令即可以產(chǎn)生豐富多樣、且細(xì)粒度的步態(tài)。
為了引導(dǎo)機(jī)器人能根據(jù)指令學(xué)習(xí)到細(xì)粒度的步態(tài),研究者在跟蹤獎勵的基礎(chǔ)之上,提出了兩種額外的步態(tài)獎勵:
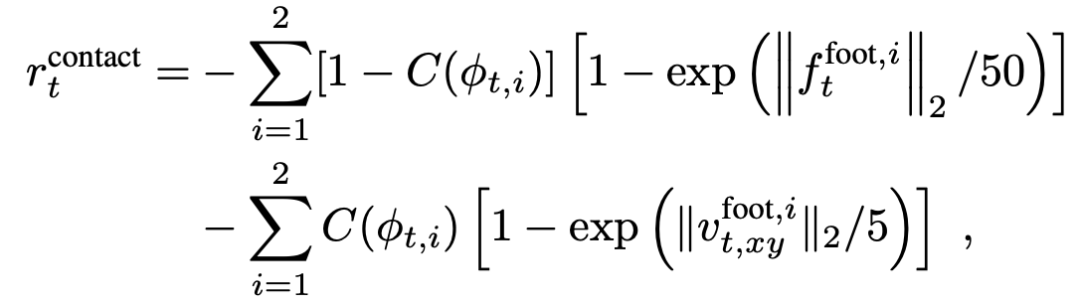

即接觸 - 擺動獎勵和足端擺動獎勵,用于引導(dǎo)機(jī)器人產(chǎn)生對應(yīng)的步態(tài)周期和足端軌跡。
對稱獎勵

自然對稱的運(yùn)動行為可以最小化能量消耗的效率,并通過后天學(xué)習(xí)逐漸被人類掌握。具有高度仿生機(jī)制的人形機(jī)器人也具有對稱的結(jié)構(gòu)特征。然而,如果沒有先驗(yàn)知識,對稱形態(tài)信息很難被策略探索,尤其是對于產(chǎn)生多樣化行為的策略。這使得最初的探索變得更加困難,使得策略很容易陷入局部最優(yōu),導(dǎo)致不自然的運(yùn)動。為了利用這種形態(tài)對稱的優(yōu)勢,研究者為人形機(jī)器人提出了鏡像函數(shù) F (?) 和對應(yīng)的損失函數(shù),以鼓勵策略產(chǎn)生對稱和自然的運(yùn)動。
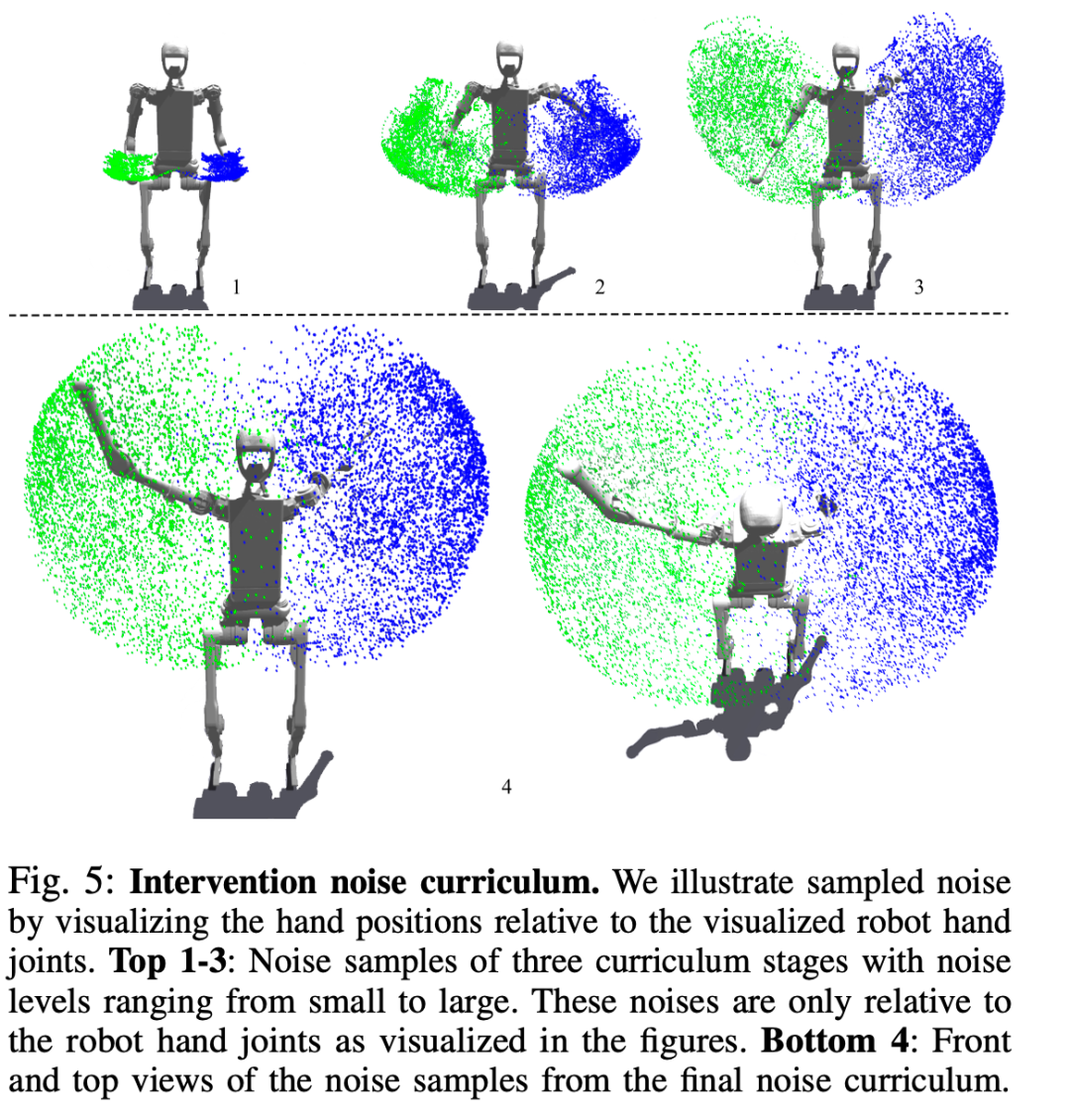
上身介入的魯棒性課程訓(xùn)練
HugWBC 將自己定位為基礎(chǔ)人形控制器,因此需要支持上半身的外部控制介入,可用于遙操等數(shù)據(jù)采集。研究者們通過設(shè)計(jì)上肢的噪聲課程來促使機(jī)器人學(xué)習(xí)到這一點(diǎn)。
最后,整套訓(xùn)練框架使用非對稱的強(qiáng)化學(xué)習(xí)算法在模擬環(huán)境里訓(xùn)練,實(shí)現(xiàn)真實(shí)場景的部署。
評估:指令跟蹤誤差和魯棒性測試
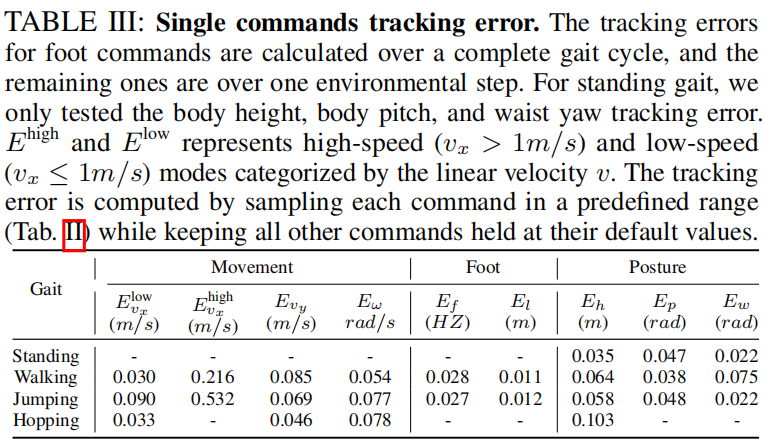
在跟蹤性誤差實(shí)驗(yàn)分析中,研究人員首先分析了在四種步態(tài)下單個指令的跟蹤誤差,如表 3 所示,其中行走(Walking)和站立(Standing)步態(tài)的跟蹤誤差明顯小于雙腳跳躍(Jumping)和單腳跳躍(Hopping),每種步態(tài)的跟蹤精度與該步態(tài)在仿真中的訓(xùn)練難度一致。例如,行走和站立的模式可以在訓(xùn)練中先學(xué)習(xí),而跳躍和跳躍的步態(tài)出現(xiàn)較晚,需要較長的訓(xùn)練時間才能熟練掌握。且低速下的運(yùn)動技能更容易掌握,高速下機(jī)器人的動態(tài)穩(wěn)定性下降,會導(dǎo)致跟蹤精度的下降。
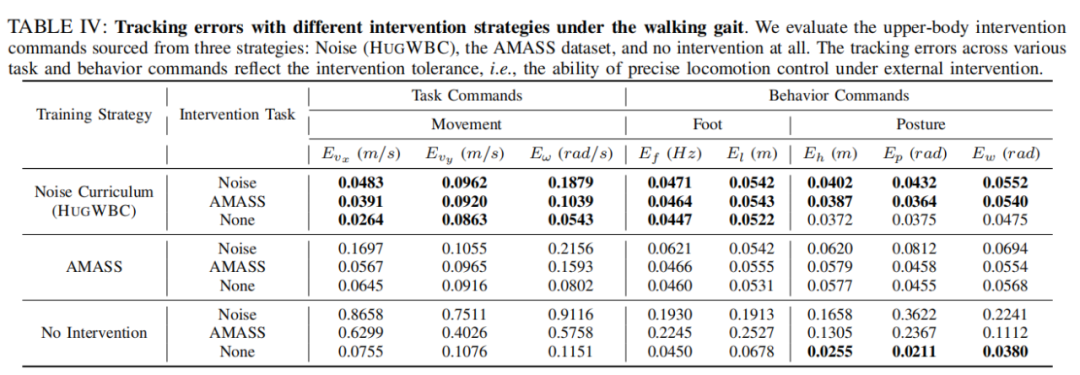
此后,研究人員評估了不同介入訓(xùn)練方法對于策略在上肢介入情況下的有效性,如表 4 所示,HugWBC 在三類測試中均取得了最好的跟蹤表現(xiàn),表明 HugWBC 的噪聲課程干預(yù)策略使控制策略能夠處理大范圍的手臂運(yùn)動,使其可以有效的支持復(fù)雜的移動操作任務(wù)。而僅學(xué)習(xí) AMASS 數(shù)據(jù)或無介入訓(xùn)練的策略則在訓(xùn)練分布外的測試中出現(xiàn)了跟蹤精度的災(zāi)難性下降。
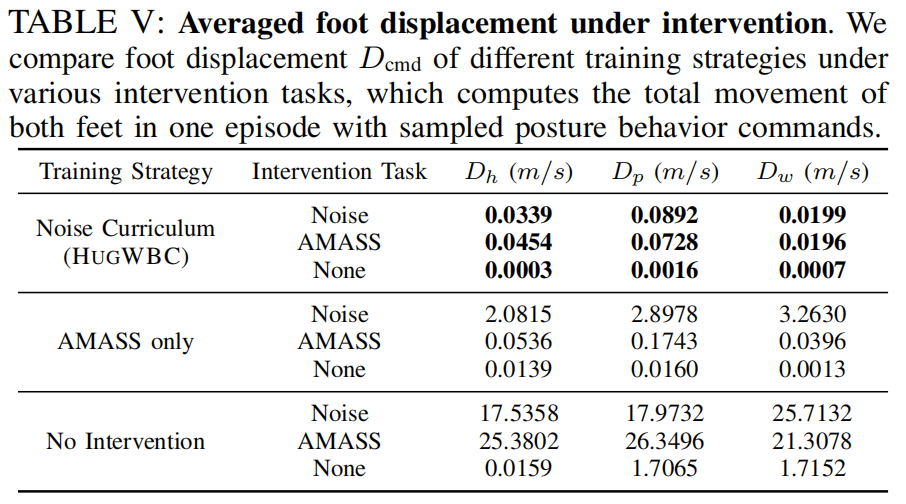
為了進(jìn)一步說明 HugWBC 對于操作任務(wù)的支持,研究人員評估了站立狀態(tài)下指令跟蹤的平均足端移動距離,如表 5 所示,HugWBC 足端移動距離最小,在站立狀態(tài)下調(diào)整姿勢引入了對穩(wěn)定性的額外要求,因?yàn)闄C(jī)器人通過踱步來保持平衡可能會增加完成需要站立不動的操作,實(shí)驗(yàn)結(jié)果表明 HugWBC 在站立的各種姿態(tài)下可以支持精細(xì)的操作任務(wù)任務(wù)的難度。
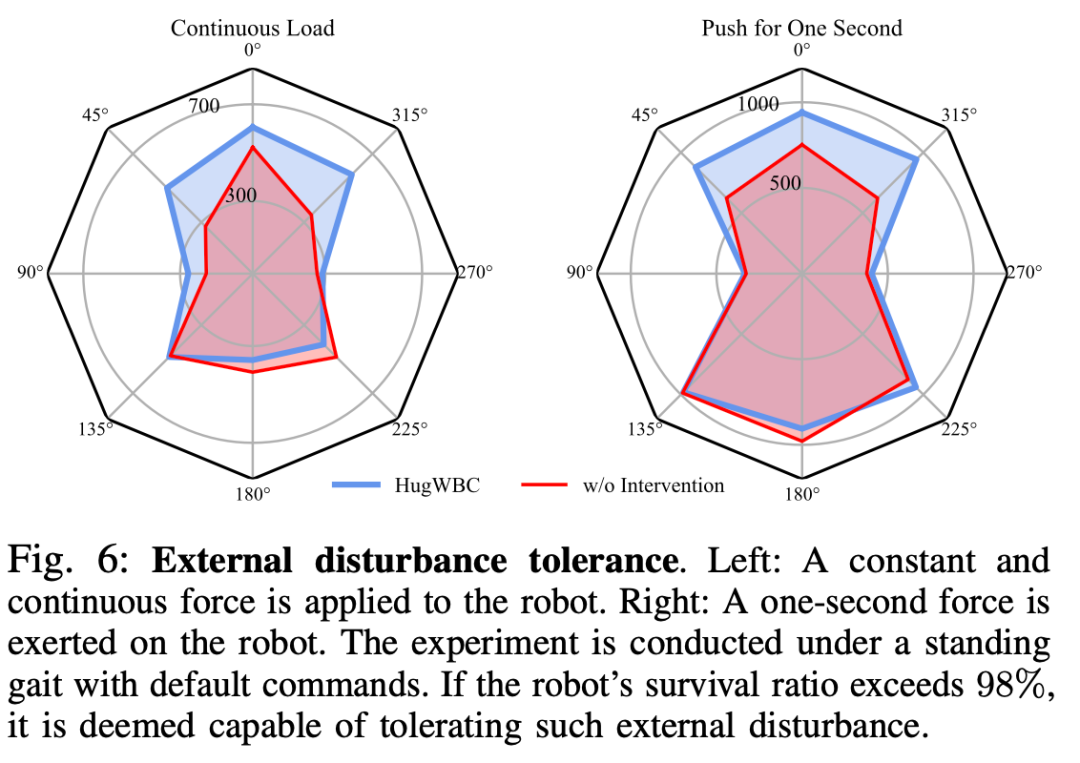
隨后,研究人員分析了介入訓(xùn)練對策略魯棒性的提升。如圖 2 所示,HugWBC 在兩項(xiàng)干擾測試中的表現(xiàn)明顯優(yōu)于未經(jīng)過介入訓(xùn)練的基線方法。其原因在于,干預(yù)使機(jī)器人能夠有效應(yīng)對來自上身的各種擾動,在訓(xùn)練過程中幾乎涵蓋了所有極端情況,從而顯著提高了策略的魯棒性。
指令的組合分析
研究者分還分析了組合指令對控制器表現(xiàn)的影響,使用熱力圖矩陣來高效地可視化了不同指令在對應(yīng)范圍內(nèi)的跟蹤精度。以步行狀態(tài)為例,
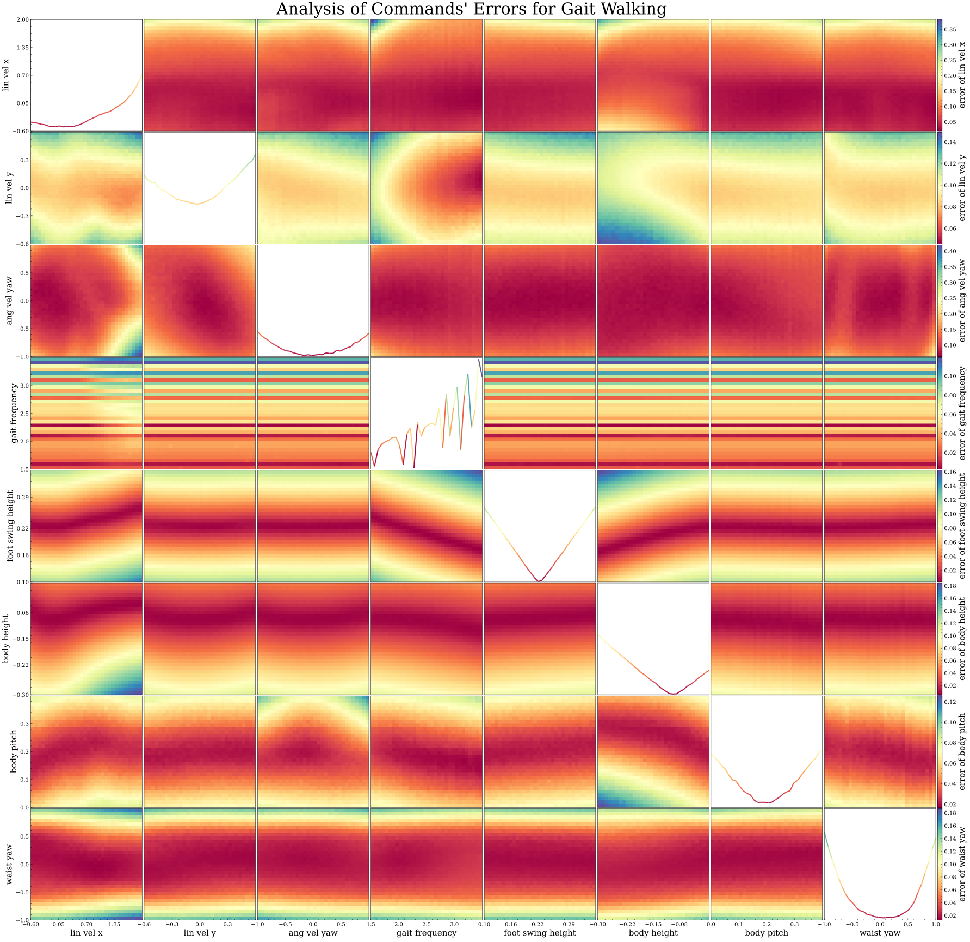
可以看到,在較小的速度范圍內(nèi),前向線速度、角速度、身體高度、轉(zhuǎn)腰角度都不會明顯的相互干擾,一旦速度超過 1.5m/s,控制器會犧牲跟蹤精度來保持動態(tài)的平衡與穩(wěn)定。橫向速度、抬腳高度與身體俯仰角則常受到明顯的干擾。頻率則是需要在合適區(qū)間內(nèi)才能使表現(xiàn)更好。抬腳高度與頻率、身體俯仰角與身體高度這兩組指令則有明顯的關(guān)聯(lián)性。




















