













4D 毫米波雷達 SLAM 方案調研
本文經自動駕駛之心公眾號授權轉載,轉載請聯系出處。
前言
Image Radar即4D 毫米波雷達,它輸出3D位置+徑向速度,相對于傳統的3D毫米波雷達(2D位置+速度)多了一維高度信息輸出。Image Radar具備傳統3D雷達所有的特點,同時彌補了后者高度信息缺失導致的一系列問題。在特斯拉在其下一代V4智駕硬件上接入Image Radar[1]后引起了行業內的關注。Image Radar在成本以及雨雪等極端天氣上表現上優于激光雷達,因此,基于Image Radar設計自動駕駛的感知和定位方案,可能會是接下來兩年的一個熱點的研究方向。
硬件原理和信號處理
ImageRadar的硬件原理
這部分可以參考[2],在硬件上,和3D毫米波的主要差異在于Image Radar多了垂直方向的天線排布(如下圖綠色框所示),這些天線實現了垂直方位的測量,進而可以解算出高度信息,但同時也給信號處理算法帶來了新的挑戰。
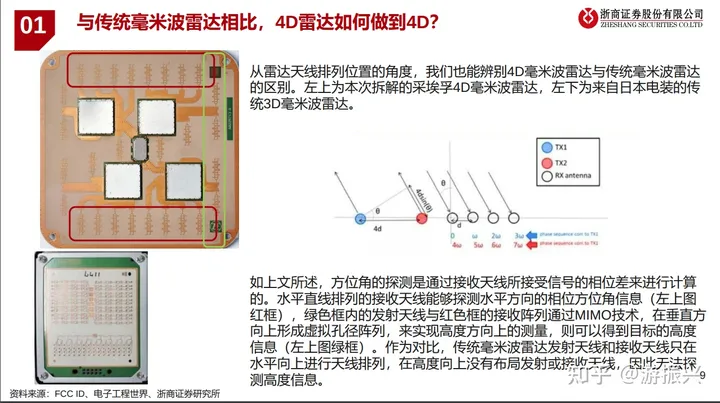
圖1 Image Radar硬件示意圖(4片級聯) [1]
Image Radar的測量原理
這部分主要參考[3], ImageRadar的速度測量原理主要是借助多普勒效應,距離測量借助發送和接收信號的時間差,這是中學教材上就熟悉的物理知識。這里稍微復雜的是目標的方位測量,方位測量主要借助多輸入多輸出技術(MIMO),n個發射端(TX)和m個接收端(RX)構成了n乘m個TX-RX對。某個發射端發送的信號會被不同的接收端接收,構成多個TX-RX組合,而不同的TX-RX組合接收到的信號有不同的相位差,這個相位差可以轉換為距離差,借助不同TX-RX接收同一個target信號的距離差和不同TX-RX天線對在硬件上的外參關系,可以解算出target的方向。由于存在多組發射端,為了區分不同的發射信號,不同的發射端的信號是互相正交的。
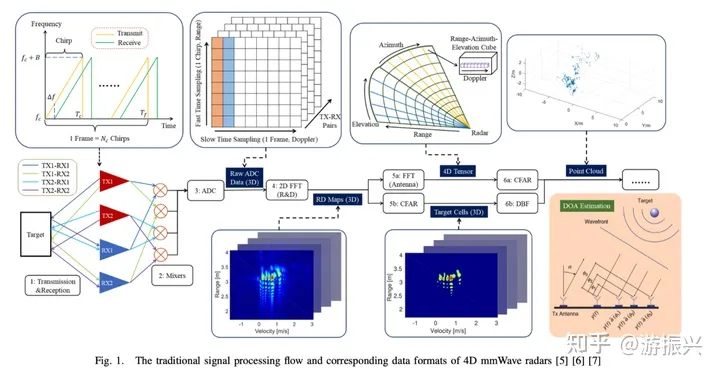
圖2 Image Radar的信號處理流程[3]
提升測量精度的方法
提升ImageRadar的方法分為硬件方法和軟件方法兩種方式[3]。硬件方式上,目前多采用多片級聯(cascading)的方式提升測量精度,這種方式通過增加TX-RX對數提升分辨率,是一種比較直觀且樸素的方法,也是目前的主流方法,這種方法的缺點是尺寸和功耗會增加。上圖1展示的硬件即4片級聯的方式。此外,也可以通過提升單個芯片集成的天線數量提升測量精度,是目前比較有潛力替代級聯的方案,但是天線間的干擾增加,目前主要處于前沿探索階段。
軟件方式上,可以使用虛擬孔徑成像(Virtual aperture imaging)技術,它通過軟件方法擴大天線的虛擬孔徑,比較明顯地提升角度分辨率,一般需要和級聯搭配,降低信號干擾。以及超分辨率算法,通過設計新的信號處理方法,優化目前基于FFT算法的信號處理流程,提升精度。
噪聲特性和濾波方法
ImageRadar的信號噪聲和處理方法和傳統的3D毫米波雷達相似,主要包括斑點噪聲和多路徑反射兩種噪聲信號的干擾[3]。在噪聲信號處理上,也可以借鑒傳統的3D毫米波雷達的信號處理方法,常用的比如CTFR濾波和速度濾波等。
Speckle Noise 斑點噪聲: 天線發送的電磁脈沖信號,與環境物體相互作用,導致天線接收到的是被干擾的信號,在沒做任何處理的情況下,產生了斑點分布的點。
Multipath 多路徑反射: 對于同一個物體,產生了多個不同的檢測路徑,信號在返回過程中,除了直接返回的信號,也存在被墻體,地面反射的信號,這些信號對于接收源來說,看起來就是在地下或者墻體后面有一個goast-object,是一個靜態的outlier
斑點噪聲(speckle noise,青色)和多路徑反射噪聲(multipath-reflections noise,紅色)表現如下:
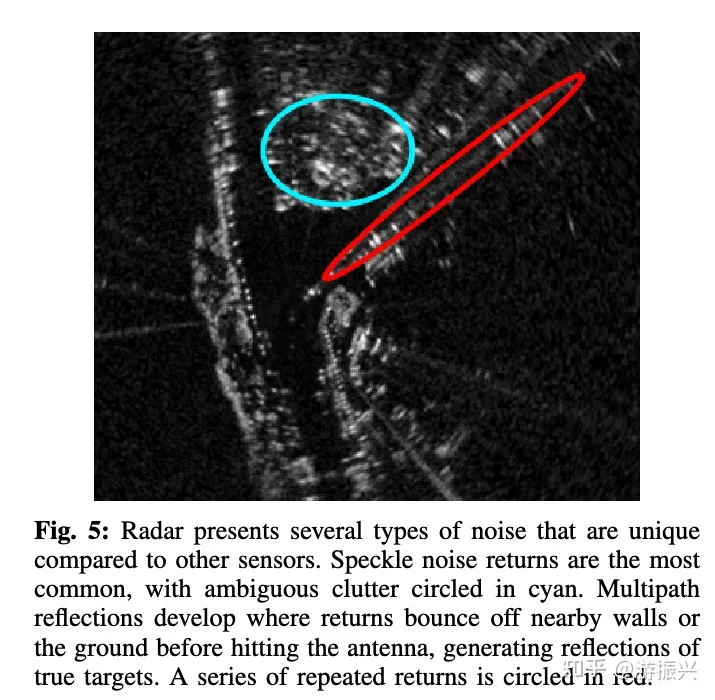
Image Radar 的斑點噪聲和多路徑反射噪聲 [4]
數據格式:4D Tensor VS PointCloud
一般地,我們從Radar上獲取的是稀疏的點云形式+速度測量,但在點云數據格式之前,存在一種4D Tensor的更稠密的信息表達形式,相對于稀疏點云形式,它包含了更多的關于目標特性的信息,學術上尤其是感知領域,也有討論使用4D tensor作為信息輸入的算法方案[3][4]。
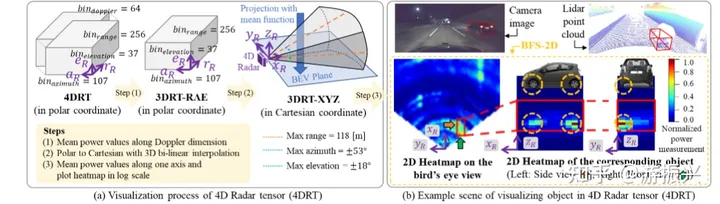
4D tensor的Image Radar數據形式 [5]
算法方案
針對于Image Radar的SLAM方案,我和團隊小伙伴做了一些調研,目前已有的方案[6][7][8][9][10]的實現思路,主要集中在如何充分利用Image Radar提供的多普勒速度測量上,來彌補Image Radar點云過少的問題。
這里的基本思路是:對于空間中靜止的物體和環境,其反射點提供的多普勒測量速度,根據相對運動,反饋的即是車體本身的速度,即每個靜止點都提供了車體本身的速度觀測,這是一個非常強且有用的約束。
以其中比較經典的DICP[6]算法為例,它推導了基于多普勒速度的觀測方程,且這個觀測方程僅和點的測量速度有關,與所處環境的空間結構性無關,可以彌補ICP在非結構化場景下的約束退化問題。方案采用ICP約束和多普勒速度約束兩種形式的觀測進行狀態估計。4d iRIOM[7]融合了Image Radar 和 IMU信息,實現了類似LIO的算法框架,對于多普勒速度的使用上,則是先用多個靜止測量點的信息,解算出車體速度,然后將這個車體速度結果作為車體速度狀態的觀測,核心也是基于靜態點的多普勒速度是車體速度的測量的事實。
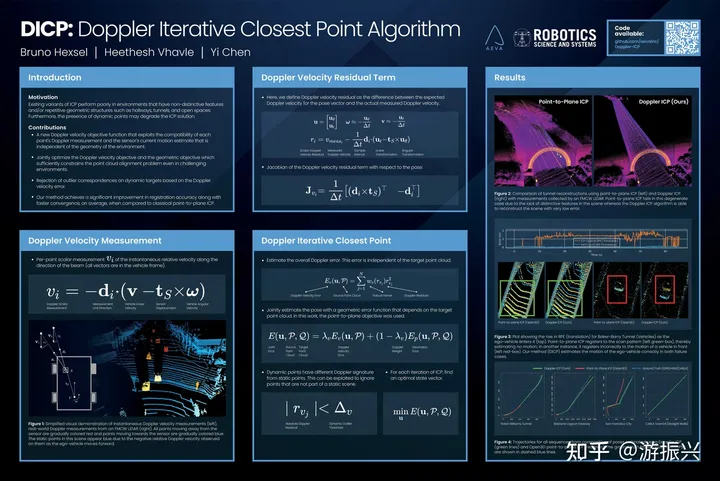
DICP算法方案 [6]
基于以上思路的Image radar SLAM算法,和傳統的激光SLAM算法方案相比,除了需要做一些radar噪聲信號的特殊處理之外,靜態點的篩選策略也是比較關鍵的部分,其中借助IMU或者輪速計的測量輔助進行靜態點篩選,在實際工程中會是比較實用的方式。
除此之外,Image Radar的反射特性不同于大部分的激光雷達,也會給算法研發帶來一些新的挑戰。比如,對于Image Radar,其在金屬物體的反射強度會比較好,對于塑料以及水泥墻體的反射效果會差一些,此外,地面點一般也會當做雜波給濾除,這些都會造成Image Radar 的點云分布和激光雷達的點云表現不太相似。考慮到Image Radar點云的實際表現,索性扔掉點云觀測,僅使用其多普勒速度測量,結合IMU和輪速觀測,實現一種增強型的DR,倒也不失為一種比較實際且節省算力的方案[10]。
即使挑戰重重,作為一種低成本提供深度測量和速度測量的傳感器,Image Radar仍然是一種可以充分討論和探索的實現SLAM技術的傳感器之一。
Reference
[1] 特斯拉HW4.0硬件升級信息匯總
[2] 浙商汽車實驗室-4D毫米波雷達拆解
[3] 4D Millimeter-Wave Radar in Autonomous Driving: A Survey
[4] A New Wave in Robotics: Survey on Recent mmWave Radar Applications in Robotics
[5] K-Radar: 4D Radar Object Detection for Autonomous Driving in Various Weather Conditions
[6] DICP: Doppler Iterative Closest Point Algorithm
[7] 4D iRIOM: 4D Imaging Radar Inertial Odometry and Mapping
[8] Instantaneous ego-motion estimation using Doppler radar
[9] 4DRadarSLAM: A 4D Imaging Radar SLAM System for Large-scale Environments based on Pose Graph Optimization
[10] Need for Speed: Fast Correspondence-Free Lidar Odometry Using Doppler Velocity

原文鏈接:https://mp.weixin.qq.com/s/4oorYtpOlm842DCsUnvdAw























