













如何評價3D點云的前景?
本文經自動駕駛之心公眾號授權轉載,轉載請聯系出處。
本人從通信轉行轉業至計算機相關行業,目前準備讀博,方向是3D 點云數據壓縮。致力于開發一種更高效的圖像、視頻壓縮算法。然而因轉行轉業不久,在圖像、視頻處理,數據壓縮相關領域基礎知識比較薄弱,在此希望得到各位大神的指導包括以下幾個方面:
1.此領域內有哪些必讀的書(我自己想到的:拓撲幾何、圖像壓縮、視頻壓縮、計算機視覺、網絡流相關)
2.商業應用:個人認為前景廣闊,隨著目前的人工智能、無人駕駛等技術的發展,將來在識別上必然會大量應用點云數據。
所以在軟件上:壓縮、識別、重構帶動技術革新。硬件上:帶動一大波攝像頭,傳感器的生產。
隨著VR、AR、MR技術及頭戴式設備的出現,我們可以設想將來可以不用出門享受實景購物(甚至試衣)、遠程3D視頻會議(注意是3D!)、游戲就更不用說了。。
期待和大家共同探討,謝謝。
前言 3D視覺與3D圖像
3D圖像和3D視覺之間存在密切的聯系,它們都涉及到三維空間的表現和感知。它們之間的聯系在于:
1、3D圖像的生成與3D視覺的感知:3D圖像是由計算機生成的三維對象的表示,可以包括三維建模、計算機輔助設計、計算機圖形學等。而3D視覺則是人類感知和理解三維世界的能力。3D圖像的生成可以借助于3D視覺的原理和技術,以使得圖像在觀看時能夠更自然地與真實世界的三維感知相吻合。
2、3D圖像用于3D視覺應用:3D圖像在許多3D視覺應用中發揮著重要作用。例如,在虛擬現實(VR)和增強現實(AR)應用中,3D圖像可用于構建虛擬環境和虛擬物體,而用戶則通過3D視覺感知這些虛擬元素的存在和交互。這種整合使得用戶能夠更深入地沉浸于虛擬世界中。
3、3D視覺的技術改進3D圖像質量:3D視覺技術的不斷改進也可以促進3D圖像的質量和逼真度。例如,通過使用更先進的3D顯示技術(如立體顯示、自動立體視覺等),可以提高3D圖像在觀看時的真實感和深度感。
4、立體視覺和深度感:3D圖像的創建和呈現通常涉及到立體視覺的原理。立體視覺允許我們同時從兩只眼睛看到稍微不同的圖像,從而產生深度感。3D圖像的呈現也是通過類似的原理,使得每只眼睛看到不同的圖像,從而在觀看時形成立體效果。
5、3D圖像處理和3D視覺的研究:在研究領域,3D圖像處理和3D視覺的研究相互交織。3D圖像處理涉及到對三維數據的處理和分析,而3D視覺研究探索人類如何感知和理解三維信息。這些領域的進展相互促進,推動了更廣泛的3D技術應用。
總而言之,3D圖像和3D視覺是相互關聯的,它們在虛擬現實、計算機圖形學、人機交互等領域的應用和研究中扮演著重要的角色,共同構建了三維空間的表現和感知。
描述3D圖像可以采用多種方法,具體選擇哪種方法取決于應用場景和需求。以下是幾種常見的3D圖像描述方法:
(1)3D模型參數描述:使用數學參數來表示3D模型的形狀和結構。這些參數可以包括模型的大小、位置、旋轉、縮放、角度等信息,也可以是更復雜的幾何參數或曲面擬合參數。
(2)體素化描述:將3D模型轉換成體素(三維像素)的形式,通過表示每個體素的狀態(如實心、空心)來描述模型的形狀。這種方法在計算機圖形學和計算機輔助設計中比較常見,類似于我的世界的像素風。

圖1 不同體素大小的效果
(3)點云描述:將3D模型表示為離散的點云數據,每個點包含其三維坐標和可能的其他屬性(例如顏色、法向量等)。點云描述在激光掃描和三維重建中被廣泛使用。
 圖2 玉米
圖2 玉米
(4)三角面片描述:使用一系列連接的三角形來描述3D模型的表面。這些三角形的頂點坐標表示了模型的形狀,而頂點之間的連接表示模型的拓撲結構。

圖3 三角面片描述
(5)深度圖描述:將3D模型渲染為深度圖像,其中每個像素值表示該像素對應的場景中物體距離相機的距離。深度圖描述通常用于視覺SLAM(同時定位與地圖構建)和三維重建。
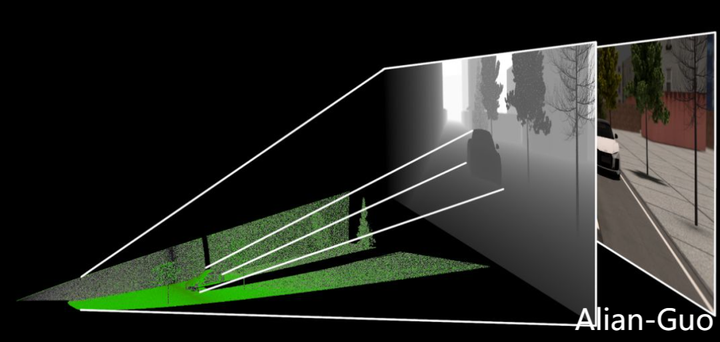
圖4 從深度圖到點云的構建方式
(6)網格描述:將3D模型表示為網格數據結構,例如三角網格或四邊形網格。網格描述在計算機圖形學中常用于渲染、動畫和模擬等領域。
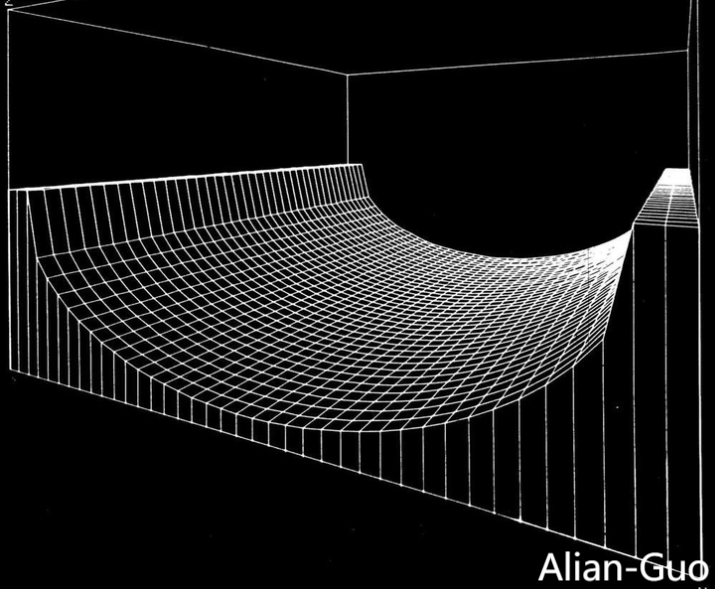
圖5 網格描述
(7)隱式函數描述:使用數學方程來表示3D模型的邊界或表面,通常為隱式方程或函數。這種方法適用于一些特定的幾何形狀表示。
(8)深度學習描述:利用深度學習技術,例如卷積神經網絡(CNN)或生成對抗網絡(GAN),來學習并生成3D模型的描述。這種方法在3D模型生成和重建方面有很好的應用。
每種描述方法都有其優勢和局限性,根據具體需求和應用場景的不同,可以選擇合適的方法或將多種方法結合使用。
本文針對點云描述,來聊一聊3D點云的一些基礎知識,介紹什么是3D點云、為什么研究3D點云、3D點云的發展歷史以及3D點云技術能給我們帶來什么、3D點云技術面臨哪些機遇和挑戰,通過初步認識點云,來逐漸了解點云、熟悉點云,掌握點云,一起學習、交流點云知識。
Part1什么是3D點云
很簡單,3D點云,指的是一個包含了大量三維點的集合,如圖6。每個點都有X、Y和Z坐標(有時候還有RGB信息和激光反射強度信息等,不同場景所需),分別表示它在三維空間中的位置。這些點通常是通過激光掃描技術(如激光雷達)或結構光掃描技術(如Kinect或其他深度傳感器)從現實世界中獲取的。
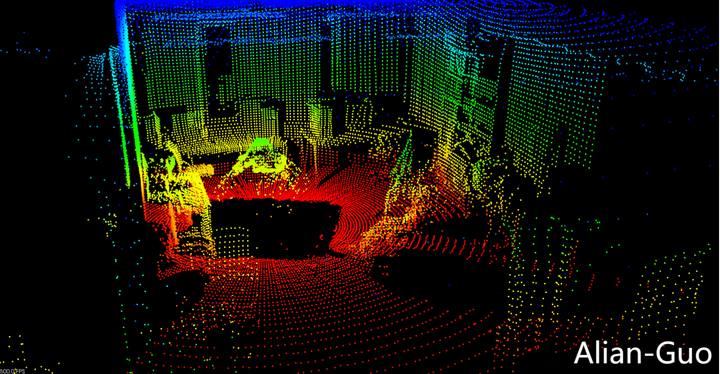
圖6 渲染后的一個房間的點云集
3D點云通常用于在三維環境中表示和捕捉物體、場景或環境。它們可以是靜態的,例如建筑物的三維模型或景觀的三維重建,也可以是動態的,例如隨著時間推移捕捉的運動物體的點云。
Part2為什么要研究3D點云
二維圖像不能解決全部任務嗎?為什么要研究三維的,為什么研究3D點云?
3D點云之所以發展起來并得到廣泛應用,主要是因為它提供了一種直觀、真實和全面的方式來表示和捕捉現實世界中的三維信息。與傳統的2D圖像相比,3D點云具有以下幾個優勢:
(1) 真實感和立體感:3D點云是由實際物體或環境中的真實三維坐標點構成的,因此能夠準確地反映現實世界中物體的形狀和位置。這使得3D點云在虛擬現實、增強現實和游戲等領域中能夠提供更真實的體驗。
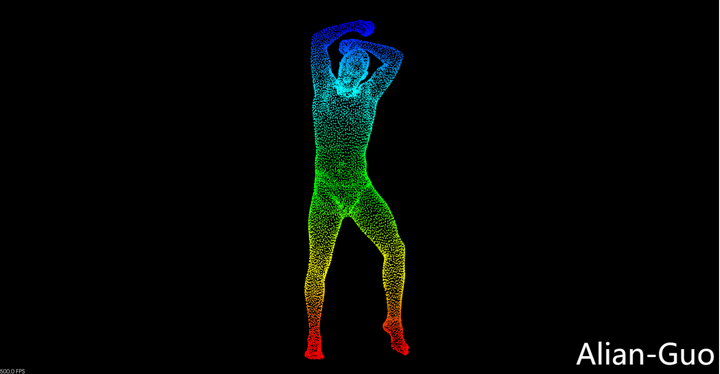
圖7 人體
(2) 豐富信息:2D圖像只包含了物體在水平和垂直方向上的信息,而3D點云則能夠提供物體在三個維度上的詳細信息。這使得3D點云在許多領域中更有用,比如三維建模、環境感知、自動駕駛等。
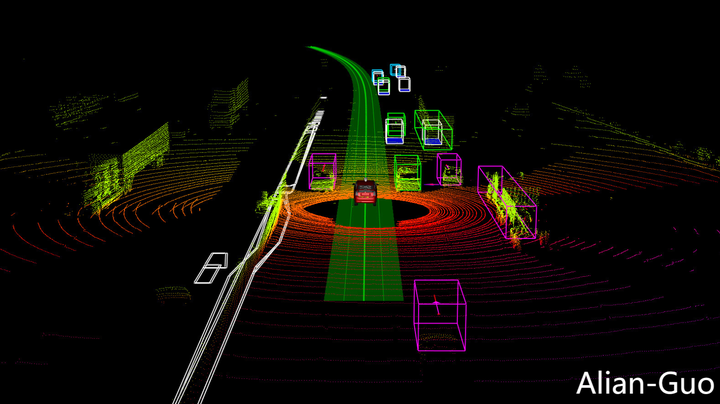
圖8 自動駕駛
(3) 不受光照和紋理影響:2D圖像的質量受到光照和紋理的影響,當場景中的光照條件發生變化或物體表面沒有明顯紋理時,圖像質量可能下降。而3D點云不受這些影響,因為它是通過距離傳感器直接測量物體的位置,而不依賴于光照和紋理。
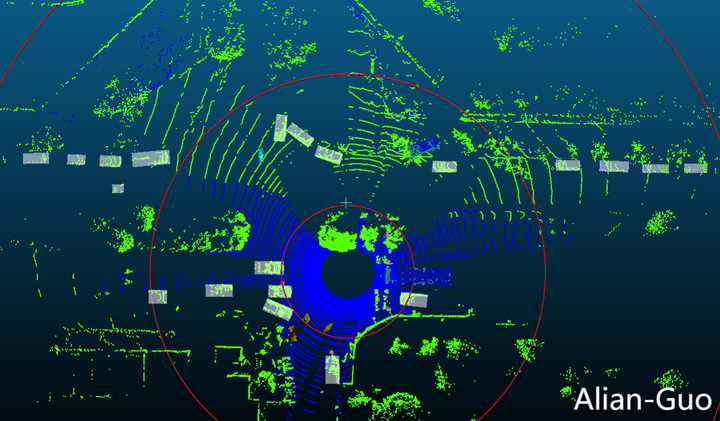
圖9 運動場景建模
(4) 可擴展性:3D點云可以通過收集更多的點來增加精度和細節,而2D圖像的質量通常受限于圖像的分辨率。
(5) 應用廣泛:3D點云在很多領域都有廣泛的應用,如自動駕駛、機器人導航、三維建模、醫學影像、虛擬現實、文物保護等。
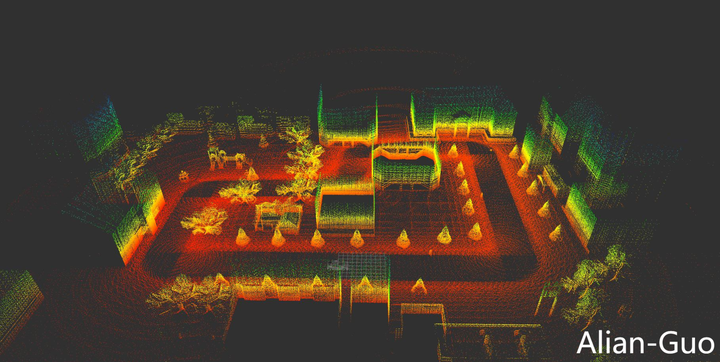
圖10 建筑建模
總之,3D點云包含的信息往往不是二維圖像所能比擬的,在以后的自動駕駛、AR、VR等領域將起關鍵作用。
Part3 3D點云的發展歷史
3D點云的發展歷史可以追溯到幾十年前,下面為3D點云發展的關鍵時間點:
1960年代 - 1970年代:激光雷達技術在軍事和地理測繪領域得到廣泛應用。最早的3D點云激光雷達系統由David H. Hough于1960年代開發,用于從地面上的飛機獲取地形信息。
1980年代 - 1990年代:3D激光掃描技術開始應用于建筑測繪、城市規劃和工程等領域。Velodyne Lidar公司成立于1983年,成為最早生產商用激光雷達傳感器的公司之一。
1990年代:結構光掃描技術的出現,如Kinect深度傳感器,使得3D點云獲取變得更加普及。這些技術使消費級設備也能夠以較低成本獲取3D點云數據。
2000年代:隨著計算機性能和算法的進步,點云處理變得更加高效和準確。從此,點云的應用領域不斷擴展,包括機器人導航、虛擬現實、三維建模等。
2010年代:深度學習技術的興起對3D點云的處理和分析產生了重大影響。一些創新的深度學習模型,如PointNet、PointNet++,開始應用于點云分類、分割和目標檢測等任務,取得了顯著的成果。
現在:3D點云在許多領域得到廣泛應用。在自動駕駛領域,激光雷達被用于感知周圍環境,實現環境感知和障礙物檢測。在虛擬現實和增強現實中,3D點云技術用于重建真實環境或物體,增強用戶的沉浸感。在建筑、工程和文物保護領域,點云用于快速準確地獲取建筑物和文物的三維模型。
未來,隨著傳感器技術和算法的不斷改進,3D點云的應用將繼續擴展,并在更多領域發揮重要作用,促進人工智能、自動化和數字化技術的發展。
Part4 3D點云技術能給我們帶來什么?有哪些機遇?
點云是分布在N維空間中的離散點集,主要以三維為主,它是對物體表面信息的離散采樣。三維掃描技術的迅速發展使得點云數據的獲取更加簡單方便,而點云驅動的計算機圖形學在逆向工程、數字城市、文物保護、智能機器人、無人駕駛和人機交互等領域日益彰顯其廣闊的應用前景。
點云處理技術包括點云獲取、濾波、分割、配準、檢索、特征提取、識別、追蹤、曲面重建、可視化等方法技術,也包括結合圖論、模式識別、機器學習、數據挖掘和深度學習等人工智能算法之后的解決實踐應用中的同步定位與地圖構建(SLAM)、三維模型檢索、三維場景語義分析、廣義點云等綜合技術內容。
1 測繪領域
能夠直接獲取高精度三維地面點數據,是對傳統測量技術在高程數據獲取及自動化快速處理方面的重要技術補充。激光遙感測量系統在地形測繪、環境檢測、三維城市建模、地球科學、行星科學等諸多領域具有廣泛的發展前景,是目前最先進的能實時獲取地形表面三維空間信息和影像的遙感系統。
2 無人駕駛領域
無人駕駛車輛是一種具有自主駕駛行為的車輛。它是在傳統車輛基礎上,加入環境感知、智能決策、路徑規劃、行為控制等人工智能模塊,進而可以與周圍環境交互并作出相應決策和動作的移動輪式機器人,用于解放駕駛員,輔助安全駕駛,得到了廣泛的關注,并且擁有良好的前景。無人駕駛能夠實現主要是依賴車載LiDAR點云系統,其可以快速提取地球表面物體三維坐標信息,實時定位于構建地圖,有著其他方法無法比擬的優勢:
(1)數據采集速度快,只需沿街一次便可收集所有信息;
(2)抗干擾能力強,全天候24小時都可進行數據采集;
(3)點云密度大,數據量豐富,精度可靠;
(4)可以得到實時車輛的位姿信息。
3 機器人領域
移動機器人對其工作環境的有效感知、辨識與認知,是其進行自主行為優化并可靠完成所承擔任務的前提和基礎。如何實現場景中物體的有效分類與識別是移動機器人場景認知的核心問題,目前基于視覺圖像處理技術來進行場景的認知是該領域的重要方法。但移動機器人在線獲取的視覺圖像質量受光線變化影響較大,特別是在光線較暗的場景更難以應用,隨著RGBD獲取設備的大量推廣,在機器人領域勢必掀起一股深度信息結合2D信息的應用研究熱潮,深度信息的引入能夠使機器人更好地對環境進行認知、辨識,與圖像信息在機器人領域的應用一樣,需要強大的信息處理技術,因此3D點云處理技術得以應用發展。
工業4.0的內涵中,特別強調了智能制造、信息物理系統(Cyber-Physical System)等概念,智能意味著機器人要具備有效感知、辨識與認知能力,同時產生相應的決策,3D彩色點云數據相信是目前最接近人類本身視覺系統的一種模擬數據。
4 人機交互領域
虛擬現實技術(簡稱VR),又稱靈境技術,是以沉浸性、交互性和構想性為基本特征的計算機高級人機界面。它綜合利用了計算機圖形學、仿真技術、多媒體技術、人工智能技術、計算機網絡技術、并行處理技術和多傳感器技術,模擬人的視覺、聽覺、觸覺等感覺器官功能,使人能夠沉浸在計算機生成的虛擬境界中,并能夠通過語言、手勢等自然的方式與之進行實時交互,創建了一種適人化的多維信息空間,具有廣闊的應用前景。
目前各種交互式體感應用的推出,讓虛擬現實與人機交互發展非常迅速,以微軟、華碩、三星等為例,目前諸多公司推出的RGBD解決方案,勢必會讓虛擬現實走出實驗室,因為現有的RGBD設備已經開始大量推向市場,只是缺少其他應用的跟進,這正是在為虛擬現實和人機交互應用鑄造生態鏈的底部,3D點云處理技術將是基于RGBD設備的虛擬現實和人機交互應用生態鏈中最重要的一個環節。
5 逆向工程與其它工業自動化領域
大部分工業產品是根據二維或三維CAD模型制造而成,但有時因為數據丟失、設計多次更改、實物引進等原因,產品的幾何模型無法獲得,因而常常需要根據現有產品實物生成物體幾何模型。逆向工程技術能夠對產品實物進行測繪,重構產品表面三維幾何模型,生成產品制造所需的數字化文檔。
在一些工業領域,如汽車制造業,許多零件的幾何模型都通過逆向工程由油泥模型或實物零件獲得,目前在CAD/CAM領域利用激光點云進行高精度測量與重建成為趨勢,同時引來了新的問題,通過獲取的海量點云數據,來提取重建模型的幾何參數,或者形狀模型,對模型進行智能檢索,從點云數據獲取模型的曲面模型等,諸如此類的問題解決方案在3D點云處理技術中都有涉及。例如kd-tree和 octree對海量點云進行高效壓縮存儲與管理,其中濾波、配準、特征描述與提前基礎處理,可以應用于模型的智能檢索,以及后期的曲面重建和可視化等技術。總之,三維點云數據的處理是逆向工程中比較重要的一環。
6 BIM
BIM ( Building Information modeling,建筑信息模型化),是用三維模型作為信息載體,以描述建筑物生命周期內的建設活動的一種理念。BIM工作的核心是建立一個可供建筑設計者、結構設計者、施工方、物業方乃至業主等參與者都能使用、修改的三維模型。這樣的模型一般稱為BIM模型,這種模型是現實地物的虛擬映射,大到整個項目的規三維激光掃描技術為BIM建立模型提供準確的幾何信息,可以大面積、高效率、全面地采集地物的幾何信息以及功能特性,快捷地建立起精確的地物模型。通過三維激光掃描得到的點云BIM模型能夠非常真實地呈現地物的實際狀態,作為一種基礎數據類型,結合BIM工程主要有以下幾方面的應用:
文物建筑保護
通過三維掃描技術,可以準確地采集和記錄管理古建筑的幾何信息和非建筑幾何信息(位置及地物關系、構件尺寸、材料等),對文物建筑的墻面、門窗、梁柱等構件等做到數據化、標準化的建檔管理,能夠詳盡地掌握文物的狀態(變形、破裂、偏離等),方便日常的維護與修繕工作。
工程質量檢測與管理
工程建設前,由三維數據構建施工現場BIM模型,為工程的設計提供精確、可靠的實地數據,保證設計的科學、合理性,并且能在進場施工之前就安排好工地布局,最大限度地減小對周圍環境的影響,并且為后續的高效施工打下基礎。工程建設中,使用BIM可以將土建、幕墻、機電、裝飾、消防、暖通等分項進度和資源供應計劃進行高效鏈接,指導工程建設過程,提高施工及資源的配置效率。工程建設完畢后,將完成后的三維建筑模型與設計的標準模型進行比對,實現對建筑物的精確驗收,對整個工程做出客觀評判。
建筑拆遷管理
通過三維掃描,能夠建立起動態、可視化的建筑模型,并且獲得準確的建筑物信息,將完整的建筑物信息導人BIM中,可以將建筑物的各種構建進行可重用性分級,根據不同的級別制定詳細的建筑垃圾回收方案,對建筑廢料進行回收再利用,盡可能減少對環境的污染,提高資源的利用率。
建筑物改造或裝修
在建筑物改造和裝修過程中,可以利用點云數據建立的BIM模型,進行可視化的設計,實時呈現改造或裝修效果,方便制定相應的改造計劃。小到一個建筑物中某一個樓層中某一個門的樣式,都能詳盡記錄、管理。
Part53D點云技術目前的挑戰
3D點云技術目前面臨著一些挑戰,這些挑戰涉及到數據獲取、處理、分析和應用等方面。目前一些主要挑戰有:
1、數據獲取處理:獲取大規模、高質量的3D點云數據仍然是一個挑戰。激光掃描和深度傳感器等技術雖然在近年來有了顯著進步,但依然存在成本昂貴、數據密度不足、采集速度較慢等問題。在某些場景下,數據的獲取也可能受到環境條件的限制,例如室外的光線和天氣狀況。
2、數據噪聲和不完整性:實際采集到的3D點云數據可能存在噪聲、遮擋和不完整性。這些問題會對后續點云處理和應用產生影響,例如在物體識別和場景分析中可能導致誤判或遺漏。
3、數據存儲與計算:3D點云數據通常龐大且復雜,需要高效的存儲和處理方法。在大規模場景下,數據的存儲和計算成本是一個挑戰。同時,對點云數據進行處理和分析所需的計算資源也是一個考慮因素。
4、點云的語義理解:對點云數據進行語義理解和分類是一個復雜的問題。點云中的點是無序的,如何準確地識別點云中的對象或場景部分,以及在點云中進行目標檢測和語義分割,仍然是一個有待解決的挑戰。
5、點云的高效表示和壓縮:點云數據的高效表示和壓縮是一個重要的研究方向。點云通常包含大量的數據點,如何用較少的存儲空間和計算資源表示點云數據,以及在傳輸過程中進行高效壓縮,是需要解決的問題。
6、數據標注與驗證:對3D點云數據進行標注和驗證是許多應用的基礎,但這是一項耗時且需要專業知識的任務。點云數據的標注需要考慮到點云的幾何形狀、語義信息和物體姿態等,而這些信息的標注和驗證通常需要借助特定的軟件和設備。
7、實時性要求:在一些應用中,如自動駕駛和虛擬現實,需要實時處理和分析大規模的點云數據。實現實時性要求對算法和計算平臺都提出了較高的要求。
克服這些挑戰需要綜合運用計算機視覺、深度學習、圖像處理和幾何處理等領域的技術。隨著技術的不斷發展和創新,相信這些挑戰將逐漸得到解決,3D點云技術將會有更廣闊的發展前景。

原文鏈接:https://www.zhihu.com/question/65566622/answer/3150925177


















