













高速無人機(jī)獨(dú)立穿越森林,全程自己規(guī)劃路線,時速高達(dá)40公里
本文經(jīng)AI新媒體量子位(公眾號ID:QbitAI)授權(quán)轉(zhuǎn)載,轉(zhuǎn)載請聯(lián)系出處。
時速40公里的無人機(jī),并不稀奇。
但能用這個速度在茂密的森林里穿梭,還是“自己遛自己”的那種,你見過嗎?

如此高超的避障飛行走位,可不是人類用手柄操作出來的,全靠無人機(jī)的“自我管理意識”。
就算是遇到運(yùn)動的障礙物,只要比這個無人機(jī)速度慢,它就都可以躲得過去。
這款自主避障無人機(jī),是由蘇黎世大學(xué)與英特爾聯(lián)合開發(fā)。
具體而言,就是以立體深度攝像頭作為眼睛,讓無人機(jī)可以自己看得見障礙物,并規(guī)劃飛行軌跡。
換上不同性能的相機(jī),它還可以自主完成不同的任務(wù)。
比如說躲避迎面砸過來的籃球,像這樣:

完成被稱作無人機(jī)雜技的高難度飛行軌跡也不在話下。
如此靈活的無人機(jī),是怎么被教出來的?
一對一的無人機(jī)避障學(xué)習(xí)
傳統(tǒng)的無人機(jī)自主避障飛行,一般都是信息處理-制作地圖-規(guī)劃路線的處理方式。
但是由于無人機(jī)搭載的芯片性能有限,如果信息處理不及時,無人機(jī)就可能會撞上障礙物造成事故。
想要提高信息處理速度,不如把三步合并為一步,利用機(jī)器學(xué)習(xí)完成輸入到輸出的映射。
具體來說,就是從傳感器信息輸入直接到飛行軌跡輸出,這種處理方式在速度上要大大優(yōu)于傳統(tǒng)方法。
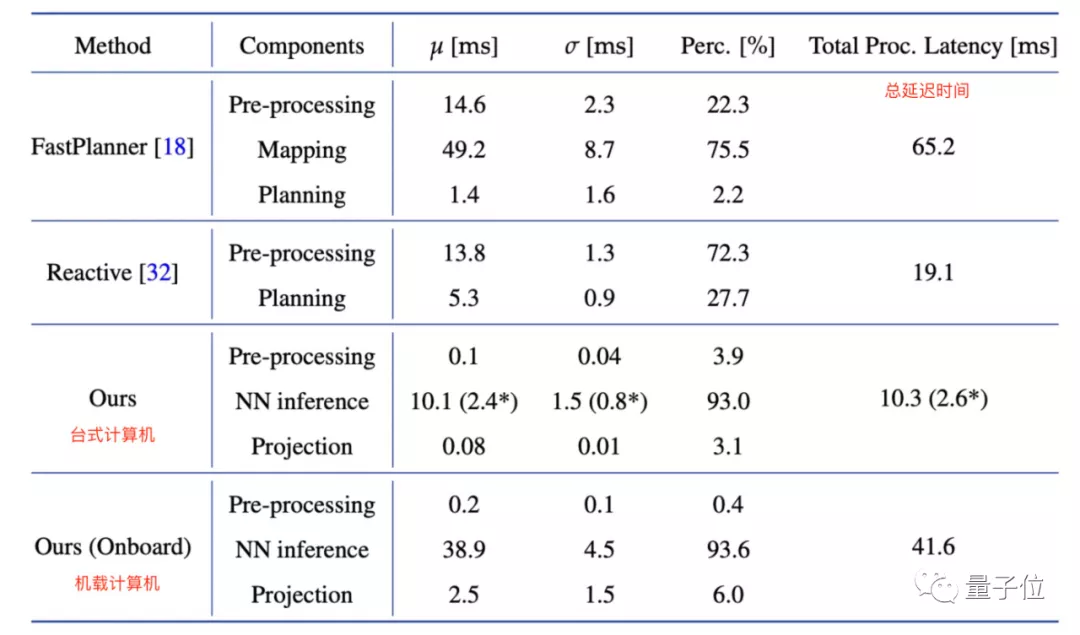
如上表所示,和傳統(tǒng)的FastPlanner、Reactive路徑規(guī)劃方法相比,這個算法所需的處理時間更短。雖然Reactive的處理速度也很快,但是它在高速飛行中的表現(xiàn)較差。
那么,無人機(jī)如何實(shí)現(xiàn)從傳感器輸入,直接到飛行軌跡的輸出映射?
這里就用到了卷積網(wǎng)絡(luò)來模擬訓(xùn)練。
模擬中的神經(jīng)網(wǎng)絡(luò)訓(xùn)練使用了一個“專家控制器”(expert controller),它可以使用3D點(diǎn)云,準(zhǔn)確估計(jì)出模擬訓(xùn)練中的環(huán)境狀態(tài)與無人機(jī)四旋翼狀態(tài)。
由于模擬訓(xùn)練沒有時間限制,“專家控制器”可以更充分地自行訓(xùn)練端到端策略。
控制器還用到了Metropolis-Hastings (M-H) 算法來計(jì)算軌跡的分布,獲得多模式導(dǎo)航方案。
在這個過程中,端到端策略訓(xùn)練如下圖所示:
訓(xùn)練完成的“專家控制器”,將會去教授現(xiàn)實(shí)中無人機(jī)上的“學(xué)生控制器”(student controller)。
“學(xué)生控制器”在跟隨“專家控制器”飛行時,使用的傳感器輸入均做了抽象化處理,以此來模擬現(xiàn)實(shí)世界中不精確的環(huán)境數(shù)據(jù)。
傳感器輸入的現(xiàn)實(shí)圖像數(shù)據(jù),會被抽象處理成與模擬環(huán)境一致的數(shù)據(jù),以此來完成訓(xùn)練軌跡在現(xiàn)實(shí)中的映射。
在雪地、脫軌火車、廢墟、茂密植被和倒塌的建筑物等場景下,無人機(jī)已經(jīng)實(shí)現(xiàn)了自主穿越。

針對運(yùn)動模糊、傳感器噪聲和其他感知偽影等情況,無人機(jī)同樣可以輕松處理。
能征服森林的無人機(jī),也有它的“禁區(qū)”
當(dāng)然了,目前這款無人機(jī)的性能還稱不上完美無缺。
模擬系統(tǒng)無法完全照搬到真實(shí)世界,現(xiàn)實(shí)中總會出現(xiàn)一些模擬不了的意外事件。
比如在低照明及其他影響視覺的環(huán)境條件下,相機(jī)感知會受到限制。像是霧霾天氣、有透明或反光表面存在的情況,無人機(jī)便無法準(zhǔn)確避障飛行。

專家控制器的訓(xùn)練不包括動態(tài)障礙物躲避,所以高速移動的物體仍然會是無人機(jī)的一大威脅因素。
針對性能的優(yōu)化,研究人員指出:
只需要使用事件相機(jī)代替?zhèn)鹘y(tǒng)相機(jī),這些視覺方面的受限因素均可以被克服。
能夠更快處理環(huán)境信息的傳感器,將會是未來高速無人機(jī)的配置方向。
同時,相關(guān)專家也提到,現(xiàn)實(shí)世界也將可能成為訓(xùn)練無人機(jī)的場所。
隨著傳感器功能和計(jì)算機(jī)能力的提升,無人機(jī)在更復(fù)雜環(huán)境中的飛行速度,很快能超過40公里/小時。

















