













結合求解器,清華大學校友、MIT中國博士生開發出第一套提高自動駕駛安全性的感知算法
本文轉自雷鋒網,如需轉載請至雷鋒網官網申請授權。
自動駕駛的落地,離不開一個關鍵條件:安全。近日,清華大學校友、MIT 在讀的中國博士生楊珩與團隊合作開發了第一套針對自動駕駛汽車的“可認證的感知”算法,有助于提高下一代自動駕駛汽車的行駛安全。
鏈接:https://arxiv.org/pdf/2109.03349.pdf
楊珩,2015年本科畢業于清華大學汽車工程專業,碩士就讀于麻省理工學院機械工程專業。碩士期間,他主要研究如何改進超聲成像系統,以追蹤肝纖維化病癥。為了做研究,他需要參加一門關于機器人的課程,叫《Underactuated Robotics》,學習如何通過設計算法來控制機器人。這使他愛上了算法設計的研究方向:
“這門課講到了數學優化,用抽象的公式來模擬世界上幾乎所有事物。我在這門課上學會了一個巧妙的方法來解決我的論文問題。計算在優化設計方面的強大表現讓我感到驚訝,我很快確定了這是我接下來要探索的方向。”
2017年,楊珩碩士畢業,轉讀 MIT 博士,目前在 MIT 的信息與決策系統實驗室(LIDS)讀博,師從 Luca Carlone,主要研究可認證的感知挑戰。目前,他已在自動駕駛的可認證感知算法設計上取得了一系列杰出成果。
什么是可認證的感知算法?
當機器人在感知周圍環境時,機器人必須使用算法來估計周圍環境,并判斷自己所處的位置。目前,用于機器人感知的算法都是被設計于快速感知,幾乎無法保證機器人是否正確理解了周圍的環境。
這也是自動駕駛算法設計的現有缺陷之一,而楊珩與 LIDS 實驗室的部分成員要解決的就是這一問題,希望通過設計“經過驗證的”算法來確定評估是否正確。
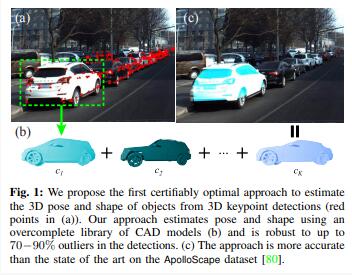
比方說,機器人在進行感知之前,首先捕捉圖像,如自動駕駛汽車會拍下正在靠近自己的汽車快照。然后,這張圖像會通過神經網絡,在圖像中生成有關接近汽車的后視鏡、車輪、車門等關鍵點,繪制出線條,以從 2D 汽車圖像上檢測到的關鍵點追蹤到3D 汽車模型中標記的 3D 關鍵點。
在這個過程中,楊珩與團隊必須解決一個優化問題,將 3D 模型旋轉與平移,以使模型與圖像上的關鍵點對齊。這個 3D 模型有助于機器人了解真實世界的環境。
在接受 MIT News 的采訪中,楊珩解釋:每一條被追蹤的線都必須經過分析,以確保它們進行了準確的匹配。由于有許多關鍵的點可能會被錯誤匹配(比如,神經網絡可能會將鏡子識別為門把手),那么這個問題就是“非凸”的,很難解決。
去年,楊珩與團隊找到了解決方法,并獲得了 ICRA 2020 的機器人視覺最佳論文獎。
論文地址:https://arxiv.org/pdf/1909.08605.pdf
在楊珩的工作中,他將非凸問題轉為凸問題,并找到了成功的匹配方法。楊珩稱,即使匹配不正確,他們所設計的算法也知道應該如何繼續嘗試,以找到最佳解決方案,即“全局最小值”。
“如果沒有更好的解決方案,(系統)就會給出一個認證。”他指出,這些可認證的算法有巨大的潛在影響,因為像自動駕駛汽車這樣的工具必須魯棒,且值得信賴。“我們的目標是,如果感知系統出現故障,駕駛員可以收到一個警報,快速接管方向盤。”
而楊珩與團隊的最新工作采取了通用與可拓展的框架來設計可認證的算法,可以在自動駕駛汽車的行駛過程中進行魯棒的幾何體感知。
這個工作的主要亮點如下:
1)將常見的魯棒成本(如TLS、最大共識、Geman-McClure、Tukey 雙權重等)轉化為多項式優化問題(POP);
2)通過關注 TLS 的成本,他們利用 POP 中的稀疏性,提出了一種比標準 Lasserre 層次結構小得多的稀疏半定規劃 (SDP) 松弛,同時保留了準確性;
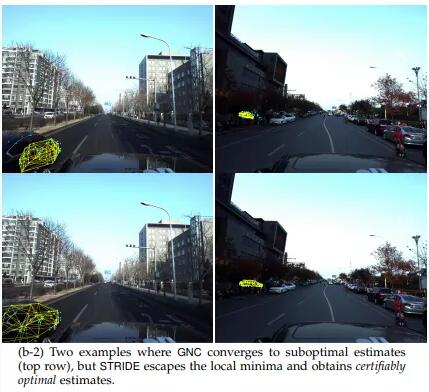
3)提出 STRIDE(一種將凸 SDP 中的全局下降與非凸 POP 的快速局部搜索相結合的求解器),以前所未有的規模和精度解決了 SDP 松弛問題;
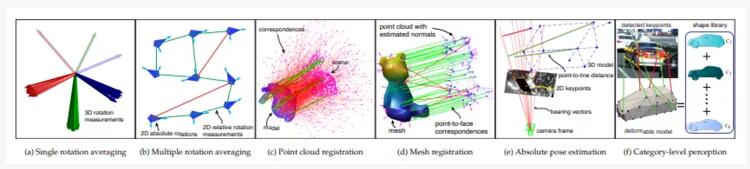
4)評估了所提出的針對六個幾何感知問題的框架,包括單次與多次旋轉平均、點云和網格配準、絕對姿態估計以及類別級對象姿態和形狀估計。
他們的實驗表明,雖然還達不到實時,但 STRIDE 在中等規模問題上比現有 SDP 求解器快了 100 倍,而且是目前唯一可以高精度求解具有數十萬個約束的大規模 SDP 的求解器。
同時,STRIDE 為現有的快速啟發式算法(如 RANSAC 或階段非凸)提供了一種保護措施,即如果啟發式估計是最優的,則證明全局最優。
使模型適應不同的汽車
在將 2D 圖像與 3D 模型進行匹配時,一個假設是 3D 模型要與識別的汽車類型相一致。但是,如果圖像中的汽車具有機器人從未見過的形狀,會發生什么?結局可能無法預料,所以,楊珩需要估計汽車的位置,并重建 3D 模型的形狀。雷鋒網
他們找到了一個解決方法:通過對原先識別的車輛進行線性組合,使 3D 模型自動變形、以匹配 2D 圖像。比方說,該模型可以從奧迪變成現代,因為它已經記錄了汽車的實際構造。識別接近車輛的尺寸是防止碰撞的關鍵。
楊珩與團隊的這項工作還入圍了機器人頂級會議 RSS 的最佳論文獎,楊珩被評為“RSS 先驅”。
鏈接:https://arxiv.org/pdf/2104.08383.pdf
近兩年,楊珩及其團隊在自動駕駛可認證感知算法的設計上取得了成系列的研究成果,而算法從實驗室走到現實世界,必然要面臨許多亟待解決的問題。期待楊珩及其團隊接下來的工作!
























