程序員深夜用Python跑神經網絡,只為用中二動作關掉臺燈
對于上了床就再也不想下來的人來說,關燈成為睡覺前面臨的最大挑戰!
然而這一屆網友永遠不會讓人失望,他們開發出了各種關燈大法:
當然少不了憨豆先生最簡單粗暴的關燈方式:
然而,一個來自意大利拉不勒斯的小哥哥,決定利用“舞步”(身體姿勢)來控制自己家的燈,整個過程利用一個神經網絡實現,就像這樣:
下面是小哥哥寫的教程,文摘菌在不改變原意的基礎上進行了編譯。
在今天的文章里,我將手把手教大家訓練一個神經網絡模型,用來識別攝像頭拍下的“舞步”,從而控制燈的開關。
我們將在已有的OpenPose深度學習模型之上建立我們自己的模型來識別身體的位置,然后,我們會建立一些樣本來代表各種身體的各種姿態。
當我們建立好舞步(包括嘻哈超人舞步、T-Pose舞步)和其他身體姿態的樣本后,我們會清理數據集,然后利用這些樣例訓練我們的神經網絡。
當神經網絡訓練好之后,我們會用它來控制燈光。
今天的文章包括很多步驟,不過,所有的代碼都在Github上,上面還包括了我已經搜集到的原始數據樣例。
GitHub鏈接:
https://github.com/burningion/dab-and-tpose-controlled-lights
編寫“編寫軟件”的軟件:怎樣訓練你的神經網絡?
首先就是數據——大量數據。
我們今天即將采用的神經網絡模型卡內基梅隆大學的團隊也曾經使用過,他們用自己的全景數據集來訓練該模型。該數據集包括五個半小時的視頻,視頻中包含了150萬個手動添加的代表人體骨骼位置的標簽。
整個全景工作室的圓屋頂上裝有500個攝像頭,所有攝像頭都對準人,從不同角度記錄他們的動作。
這個全景工作室用構造訓練數據集幾乎是完美的,很方便進行計算機視覺的實驗。
今天,我們將在他們的工作基礎之上開始我們的工作。
首先我們會用他們的工具來創建一個很小的數據集。我們最終的神經網絡只會使用171個姿態,包括記錄的嘻哈超人舞步、T-Pose舞步和其他姿態。每一個姿態樣例都是從卡耐基梅隆大學已有的工作中提取出來的。
神經網絡的一個好處就是你可以使用別人已經建成的模型,然后加入一些新的神經網絡層,以此來擴展該模型。這個過程被稱之為遷移學習,因此我們可以用有限的資源來進行遷移學習。
從技術上來說,我們不會在這個項目中使用遷移學習,因為我們會對OpenPose的工作做一些細微的修改,然后創建一個獨立的神經網絡。
那么問題來了,我們該如何獲取數據呢?
寫一個程序并利用OpenCV來收集帶標簽的數據
使用OpenPose的成果,我們得到了25個代表人體骨骼架構的標簽。我們可以寫一個程序來控制網絡攝像頭,在圖像上運行OpenPose,然后將動作與鍵盤上的按鍵相對應。
也就是說,我們做出一個T-Pose的動作,然后在鍵盤上點擊m鍵,那么這個動作就被歸到T-Pose那一類里。我們按照這個方法去添加171個不同的姿勢,這樣一來,我們就有數據訓練神經網絡了。以下是用于數據收集的代碼的示例:
- # create lists for dab, tpose, other examplesdabs = []tposes = []other = []fps_time = 0# loop forever, reading webcam each timewhile True: ret_val, frame = vs.read() datum.cvInputData = frame opWrapper.emplaceAndPop([datum]) # need to be able to see what's going on image = datum.cvOutputData cv2.putText(image, "FPS: %f" % (1.0 / (time.time() - fps_time)), (10, 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2) cv2.imshow("Openpose", image) fps_time = time.time() # quit with a q keypress, b or m to save data key = cv2.waitKey(1) & 0xFF if key == ord("q"): break elif key == ord("b"): print("Dab: " + str(datum.poseKeypoints)) dabs.append(datum.poseKeypoints[0]) elif key == ord("m"): print("TPose: " + str(datum.poseKeypoints)) tposes.append(datum.poseKeypoints[0]) elif key == ord("/"): print("Other: " + str(datum.poseKeypoints)) other.append(datum.poseKeypoints[0])# write our data as numpy binary files# for analysis laterdabs = np.asarray(dabs)tposes = np.asarray(tposes)other = np.asarray(other)np.save('dabs.npy', dabs)np.save('tposes.npy', tposes)np.save('other.npy', other)
然后用NumPy的數組來儲存特征,并用np.save函數把特征保存為二進制文件以便后續使用。我個人傾向于使用Jupyter notebook來觀察和處理數據。
當數據收集好之后,我們可以觀察并清理數據以便更好地去訓練模型。
觀察數據、清理數據以及使用數據訓練模型
這部分看上去很復雜,但是通過使用Jupyter notebook、NumPy和Keras,我們就可以很直觀地去觀察數據、清理數據,并且使用數據來訓練神經網絡。
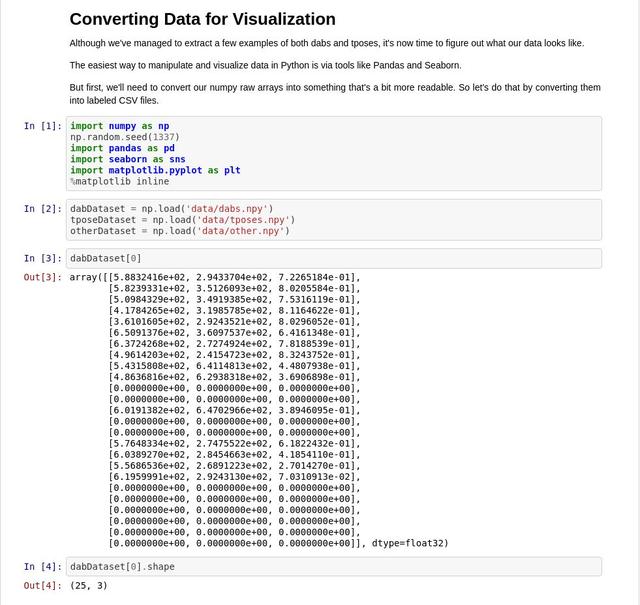
根據我們的截圖,我們可以發現npy文件中保存的數據和OpenPose模型本身都有三個維度,25個已知的身體位置坐標點,X、Y、以及Confidence。
我們的模型訓練工作不需要用到confidence。如果某個身體位置坐標點被命名了,我們就保留它,否則,我們就直接讓它為0。
我們已經把(絕大部分)數據梳理好了,現在我們需要把數據特征和標簽結合起來。
我們用0代表其他姿勢,1代表嘻哈超人舞步、2代表T-Pose舞步。
- labels = np.zeros(len(otherDataset))labels = np.append(labels, np.full((len(dabDataset)), 1))labels = np.append(labels, np.full((len(tposeDataset)), 2))print(labels)print("%i total examples for training." % len(labels))
接下來,我們可以使用獨熱編碼處理我們的數字標簽。也就是說,我們將標簽0、1、2轉換成[1,0,0]、[0,1,0]、[0,0,1]。之后,我們可以使用sklearn的shuffle函數將數據標簽和特征打亂(數據標簽和特征仍保持原有的對應關系)
- # now, let's shuffle labels and the array, the same wayfrom sklearn.utils import shuffleX1, y1 = shuffle(dataset, labels)# now let's label them for 'one hot'from keras.utils.np_utils import to_categoricaly1 = to_categorical(y1, 3) # we have 3 categories, dab, tpose, otherprint(y1.shape[1)]
我們的輸入數據代表著鼻子、手等等的位置,而它們的是介于0到720和0到1280之間的像素值,所以我們需要把數據歸一化。這樣一來,我們可以重復使用我們的模型而不用考慮輸入圖片數據的分辨率。
- X1[:,:,0] = X1[:,:,0] / 720 # I think the dimensions are 1280 x 720 ?X1[:,:,1] = X1[:,:,1] / 1280 # let's see?X1 = X1[:,:,1:]print(X1.shape)X1 = X1.reshape(len(X1), 50) # we got rid of confidence percentage
在最后一步中,我們將把我們的多維數據變成一維。我們會分批向模型輸入50個位置信息(25個部位,每個部位的X和Y值)。
構建并訓練我們的模型
在Jupyter notebook中使用Keras可以把訓練和測試神經網絡模型的工作變得十分簡單,這也是我最喜歡Keras的地方。
現在我們的數據已經貼上標簽準備就緒了,我們可以開始訓練一個簡單的模型了,只需要幾行代碼。
現在我們導入Keras庫然后訓練一個簡單的神經網絡模型。
- from keras.models import Sequentialfrom keras.layers import Dense, Dropout, Activation, Flattenfrom keras.optimizers import SGD
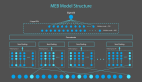
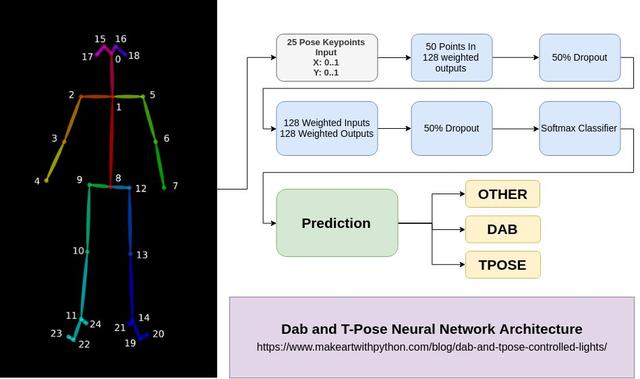
- model = Sequential()model.add(Dense(128, activation='relu', input_shape=(50,)))model.add(Dropout(0.5))model.add(Dense(128, activation='relu'))model.add(Dropout(0.5))model.add(Dense(y1.shape[1], activation='softmax'))model.compile(optimizer='Adam', loss='categorical_crossentropy', metrics=['accuracy'])model.fit(X1, y1, epochs=2000,batch_size=25)
搞定!
這里有個稍微需要注意的地方,輸入層的大小為50,提醒大家一下,這個數字是OpenPose模型中位置點的X坐標和Y坐標數量之和。
最后我們用到了Softmax層,它是用來分類的。我們將y.shape[1]傳入該層,這樣我們的模型就知道不同類別的數量了。
最后的最后,我們使用輸入數據,用model.fit()的方法去訓練模型。這里,我已經做了2000次迭代(全部樣本訓練一次為一次迭代)。2000次迭代貌似有點多了,500次左右的迭代可能更好,因為迭代次數過多可能使我們的模型出現一些過擬合問題。但是不論是哪一種情況,你都需要經過多次嘗試來確定迭代次數。
當我們運行這段代碼時,我們會看到準確度在提高。如果你看不到,請再次確認當你打亂數據時,數據標簽和數據特征的對應關系是不變的。此外,也要確認數據里的數值是不是在0到1之間。
最后,我們可以保存訓練后的模型,也可以使用樣本數據集來測試該模型,保存模型的代碼很簡單:
- model.save('data/dab-tpose-other.h5') # save our model as h5
- # in our other code, or inline, load the model and test against sample dab datasetimport kerasmodello = keras.models.load_model('data/dab-tpose-other.h5')dabDataset = np.load('data/test-dabs.npy')dabDataset[:,:,0] = dabDataset[:,:,0] / 720 # I think the dimensions are 1280 x 720 ?dabDataset[:,:,1] = dabDataset[:,:,1] / 1280 # let's see?dabDataset = dabDataset[:,:,1:]dabDataset = dabDataset.reshape(len(dabDataset), 50)modello.predict_classes(dabDataset) # returns array([1, 1, 1, 1, 1, 1])
用模型來控制燈光
我們現在已經有了可以識別姿勢的模型,接下來要做的只是把這個模型和無線燈光控制關聯起來就行了。
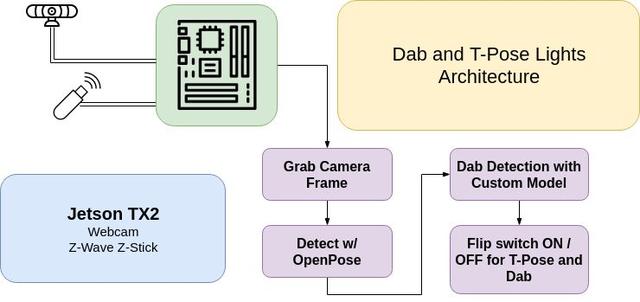
在我的這個例子中,我使用Aeotec Z-Stick來發送Z-Wave指令,并配有兩個GE Z-Wave的室外開關。USB接口接入到NVIDIA TX2人工智能模塊,其實NVIDIA的Jestson Nano也能勝任,盡管Jetson Nano所能提供的分辨率要低于我樣例中1280x720的分辨率。當Z-Stick插入到ARM設備后,你首先需要把開關調到Z-Wave模式,可能需要多按幾下USB Stick上的按鈕和燈的開關。
代碼并不復雜,基本上就是訓練環境再加上一個額外的步驟。現在,我們導入Keras,然后使用清理過的數據訓練模型。
- import cv2import pyopenpose as opfrom imutils import translate, rotate, resizeimport openzwavefrom openzwave.option import ZWaveOptionfrom openzwave.network import ZWaveNetwork# make sure these commands get flushed by doing them first, then loading tensorflow...# tensorflow should take enough time to start for these commands to flushoptions = ZWaveOption('/dev/ttyACM0')options.lock()network = ZWaveNetwork(options)import timeimport numpy as npnp.random.seed(1337)import tensorflow as tf# make sure tensorflow doesn't take up all the gpu memoryconf = tf.ConfigProto()conf.gpu_options.allow_growth=Truesession = tf.Session(config=conf)import keras# Custom Params (refer to include/openpose/flags.hpp for more parameters)params = dict()params["model_folder"] = "../../models/"# built in TX2 video capture sourcevs = cv2.VideoCapture("nvarguscamerasrc ! video/x-raw(memory:NVMM), width=(int)1280, height=(int)720,format=(string)NV12, framerate=(fraction)24/1 ! nvvidconv flip-method=0 ! video/x-raw, format=(string)BGRx ! videoconvert ! video/x-raw, format=(string)BGR ! appsink")tposer = keras.models.load_model('dab-tpose-other.h5')# Starting OpenPoseopWrapper = op.WrapperPython()opWrapper.configure(params)opWrapper.start()datum = op.Datum()np.set_printoptions(precision=4)fps_time = 0DAB = 1TPOSE = 2OTHER = 0LIGHTS = 0bounced = time.time()debounce = 3 # wait 3 seconds before allowing another commandwhile True: ret_val, frame = vs.read() datum.cvInputData = frame opWrapper.emplaceAndPop([datum]) # need to be able to see what's going on image = datum.cvOutputData cv2.putText(image, "FPS: %f" % (1.0 / (time.time() - fps_time)), (10, 20), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2) cv2.imshow("Openpose", image) if datum.poseKeypoints.any(): first_input = datum.poseKeypoints try: first_input[:,:,0] = first_input[:,:,0] / 720 first_input[:,:,1] = first_input[:,:,1] / 1280 first_input = first_input[:,:,1:] first_input = first_input.reshape(len(datum.poseKeypoints), 50) except: continue output = tposer.predict_classes(first_input) for j in output: if j == 1: print("dab detected") if LIGHTS == 0 or (time.time() - bounced) < debounce: continue for node in network.nodes: for val in network.nodes[node].get_switches(): network.nodes[node].set_switch(val, False) LIGHTS = 0 bounced = time.time() elif j == 2: print("tpose detected") if LIGHTS == 1 or (time.time() - bounced) < debounce: continue for node in network.nodes: for val in network.nodes[node].get_switches(): network.nodes[node].set_switch(val, True) LIGHTS = 1 bounced = time.time() fps_time = time.time() # quit with a q keypress, b or m to save data key = cv2.waitKey(1) & 0xFF if key == ord("q"): break# clean up after yourselfvs.release()cv2.destroyAllWindows()
到了這一步,工作基本上就算完成了!
我們成功地訓練了一個用于識別嘻哈超人舞步、T-Pose舞步的神經網絡模型,然后我們可以讓它根據我們的舞步來制造可互動的燈。
太棒了,給自己點個贊!
后記
所有代碼、模型以及訓練數據都免費公布在Github上。
我建議你們在Jupyter notebook上試試這個項目。我的代碼中有個漏洞,我一直無法從自己的工作簿中找出來。這個漏洞導致我的原始的X和Y標簽并沒有被正確地標記。如果你找到了解決這個漏洞的方法,記得在Github上創建一個Pull Request(PR)。
另外,我們今天構建的基礎模型可以用來訓練很多類型的舞蹈動作。盡管我的模型每秒只能捕捉很少的畫面,但我們可以開始建立一個有關舞步的數據集,然后再構建一個能識別這些不同舞步的神經網絡模型。