













實時局部建圖的深入思考 | MapTR繼往開來的18篇論文剖析!
本文經(jīng)自動駕駛之心公眾號授權(quán)轉(zhuǎn)載,轉(zhuǎn)載請聯(lián)系出處。
實時局部建圖領(lǐng)域自從端到端方案MapTR(2023.1)[1]問世后已經(jīng)又涌現(xiàn)出非常多優(yōu)秀的工作,基本是在MapTR基本框架的基礎(chǔ)上進行一系列改進,包括原班人馬的升級作品MapTRv2(2023.8)[2].博主準備從MapTRv2開始至今(2024.5)發(fā)表的比較優(yōu)秀的論文按時間順序做一個梳理,大概18篇,因為數(shù)量較多不具體介紹每個模塊,只按自己的理解概括最核心的創(chuàng)新點,在文章結(jié)尾會對18篇論文做一個簡要總結(jié),希望對從事相關(guān)領(lǐng)域研究的同學(xué)和業(yè)內(nèi)人士有所幫助.
[1] MapTR: Structured Modeling and Learning for Online Vectorized HD Map Construction
[2]MapTRv2: An End-to-End Framework for Online Vectorized HD Map Construction
1.BeMapNet(2023.6][3]
[3] End-to-End Vectorized HD-map Construction with Piecewise Bezier Curve
BeMapNet是在MapTR之后發(fā)表的,但沒有借鑒MapTR架構(gòu),而是在基于圖像分割+復(fù)雜后處理得到向量化地圖元素的模型,如HDMapNet[4] 的基礎(chǔ)上,首次提出使用分段的貝塞爾曲線來表征地圖元素,實現(xiàn)端到端的目的.關(guān)于貝塞爾曲線可參考這篇博客:啟思:從零開始學(xué)圖形學(xué):10分鐘看懂貝塞爾曲線(https://zhuanlan.zhihu.com/p/344934774).
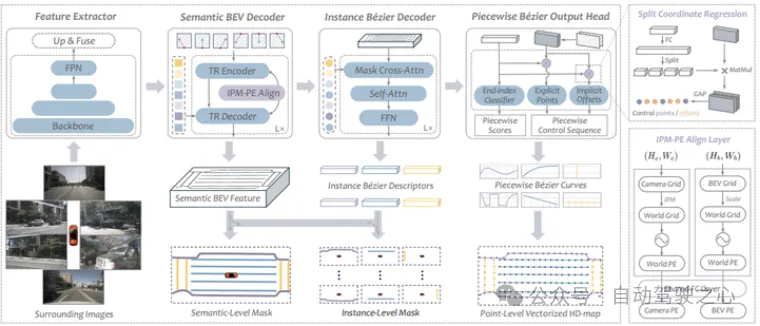
BeMapNet架構(gòu)
為了能更加準確且高效地表示形狀復(fù)雜多變的地圖元素,論文中使用分段的貝塞爾曲線,并且使用固定的階數(shù)和可變的分段數(shù).由Bezier Decoder輸出實例級的貝塞爾曲線特征,再由Piecewise Bezier Output Head輸出point級的貝塞爾曲線控制點序列.文中還使用IPM-PE Align Layer為bev feature提供IPM投影的幾何先驗信息.
2.MapTRv2(2023.8)[2]
是MapTR的提升版,文中總結(jié)的第一個創(chuàng)新點是置換等價(permutation-equivalent)建模方法,也就是對gt建立多個按不同順序排列的點集副本,目的是消除排列順序的影響,然后用分層二分匹配(Hierarchical bipartite matching)的方式與query的預(yù)測結(jié)果做匹配,匹配的標準是與距離最近的一種排列的gt的距離,有點繞,因為在原版MapTR已經(jīng)用到,不過多介紹.
第二個創(chuàng)新點是MapTRv2的核心,是對decoder的self-attention和cross-attention都做出了改進.對self-attention的改進是使用分層query embedding的方案代替之前的全量query embedding,就是建立實例級的instance query 和關(guān)鍵點級的point query兩個集合,分別在集合內(nèi)部做self-attention,再用廣播相加的方式代表全量的query集合,這種共享權(quán)重的方式不僅能為每個point賦予對應(yīng)的instance信息,還能極大地減少計算量,在精度和性能上都有很大提升.對cross-attention的改進主要是混合了BEV-based和PV-based cross-attention,充分利用BEV和PV信息.下圖可以直觀展示這種設(shè)計:
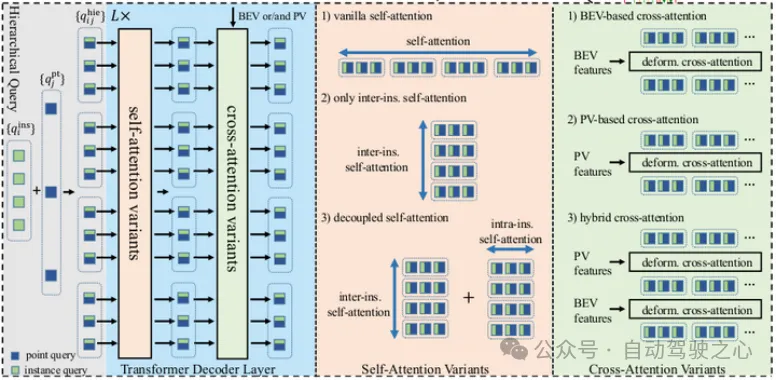
MapTRv2 的Map decoder結(jié)構(gòu)
還有一個創(chuàng)新是結(jié)合了one-to-one和one-to-many匹配.one-to-one自不必說,one-to-many是另外設(shè)計了一組instance query,與復(fù)制了K次的gt進行匹配,這樣可以增加正樣本的匹配成功概率,加快模型的收斂.
3.StreamMapNet(2023.8)[4]
[4]StreamMapNet: Streaming Mapping Network for Vectorized Online HD Map Construction
StreamMapNet主要在時序方面對MapTR進行了提升.核心策略是近期出現(xiàn)的streaming strategy,在去年發(fā)布的VideoBEV [5],StreamPETR [6], Sparse4D v2 [7]等論文都有應(yīng)用,不同于傳統(tǒng)的單iteration迭代多幀或者stacking多幀的方式,streaming strategy單iteration只迭代一幀,在iteration之間做時序融合,可以實現(xiàn)時序模型的訓(xùn)練時長與單幀模型相當,且能融合長時序數(shù)據(jù),大幅提升了訓(xùn)練效率.在StreamMapNet的時序融合中,使用了稠密bev feature和稀疏query同時融合的方式,bev feature采用Gated Recurrent Unit [8] (GRU)模塊進行融合,稀疏query采用和Sparse4D v2類似的方式,按置信度取top k個query迭代到下一幀,與下一幀新初始化的query進行合并,再用一個transformation loss進行約束.
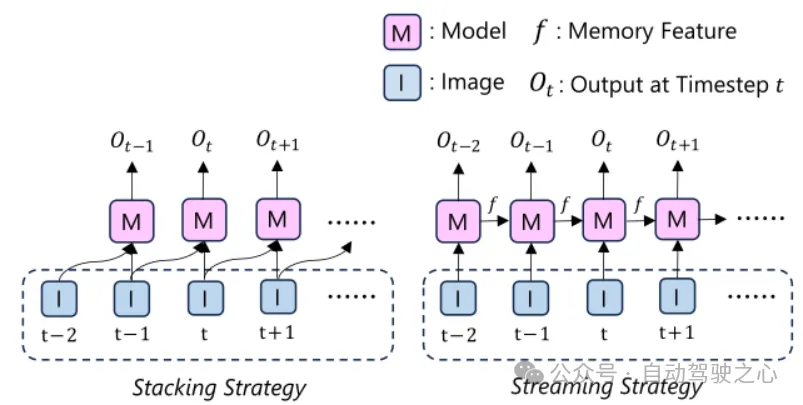
Stacking 和 Streaming 策略對比
[5]Exploring recurrent long-term temporal fusion for multi-view 3d perception
[6] Exploring object-centric temporal modeling for efficient multi-view 3d object detection
[7] Sparse4d v2: Recurrent temporal fusion with sparse model
[8] Empirical evaluation of gated recurrent neural networks on sequence modeling
文中還使用了Multi-Point Attention代替原始deformable DETR的cross-attention設(shè)計,參照MapTRv2, 本質(zhì)上是只使用了instance query,沒有point query,一個instance query負責(zé)預(yù)測多個點,生成多個reference points,而不是原始deformable DETR中一個query預(yù)測一個點,生成一個reference points,加多個offset.這樣是為了適應(yīng)地圖元素的non-local特性.我認為本質(zhì)上與區(qū)分instance query和point query差不多.
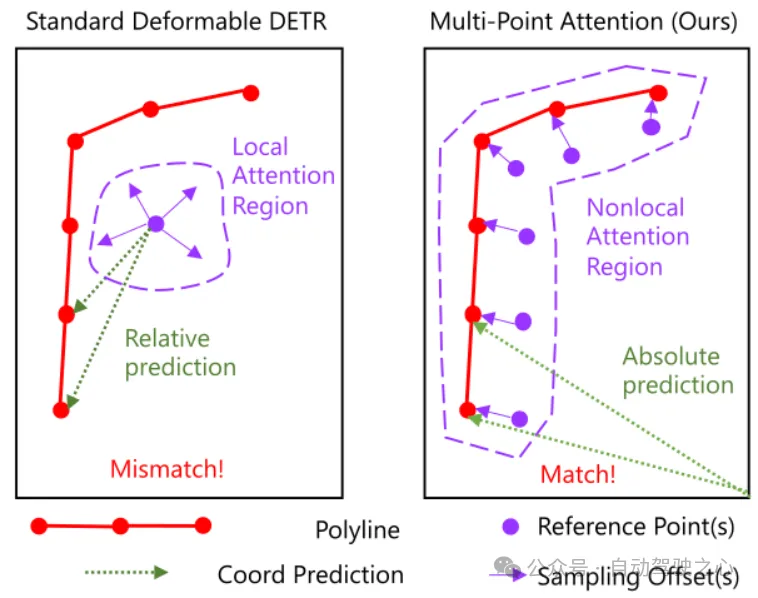
Multi-Point Attention
4. InsightMapper(2023.8)[9]
[9] InsightMapper: A closer look at inner-instance information for vectorized high-definition mapping
InsightMapper也是在MapTR基礎(chǔ)上做出一些改進.第一是細化了地圖元素預(yù)處理,如下圖所示,將原Polyline的復(fù)雜形狀都在交點切分成多個簡單形狀,降低模型學(xué)習(xí)難度.

地圖元素預(yù)處理
第二是提出MapTR的分層query embedding的設(shè)計有一個問題是instance之間共享了point query的權(quán)重,導(dǎo)致不同instance的points錯誤地有了一定的關(guān)聯(lián)性.所以文中沒有設(shè)定共享point query權(quán)重,而是對每個instance設(shè)置不同的point query,稱為Hybrid query, 消除這種錯誤的關(guān)聯(lián).在做self-attention進行instance內(nèi)部信息交互的時候設(shè)計一個attention-mask,讓屬于不同的instance的point query之間不可見,只在instance內(nèi)部進行交互.
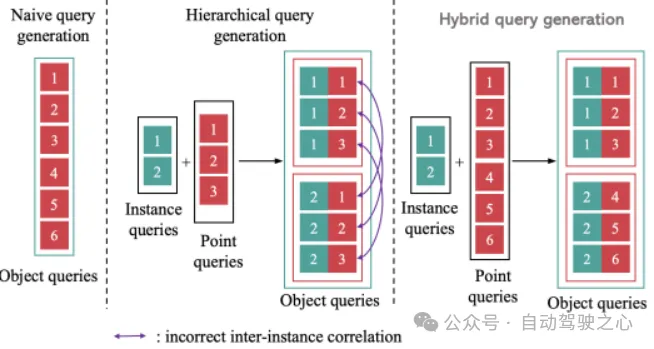
Hierarchical query和Hybrid query對比
5. MapPrior(2023.8)[10]
[10] MapPrior: Bird's-Eye View Map Layout Estimation with Generative Models
MapPrior是一種結(jié)合感知和先驗的地圖模型,先驗用的是預(yù)訓(xùn)練生成模型,整體結(jié)構(gòu)如下:因為對生成模型了解不是很深,就不具體介紹了.
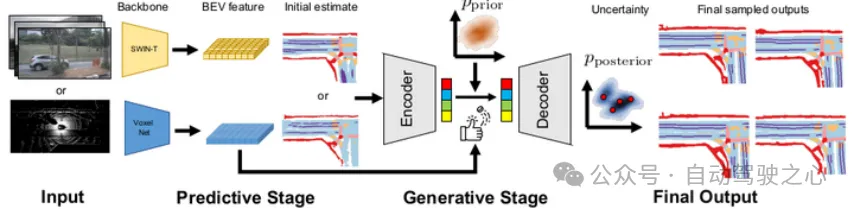
MapPrior架構(gòu)
6.PivotNet(2023.9)[11]
[11] PivotNet: Vectorized Pivot Learning for End-to-end HD Map Construction.
PivotNet針對MapTR使用固定數(shù)量且地位一致的點表征復(fù)雜地圖元素會引起形狀信息損失的問題,提出了用關(guān)鍵點(pivot)和共線點(collinear point)表征地圖元素的端到端框架.關(guān)鍵點即對元素形狀產(chǎn)生決定性影響的點,如下圖所示.
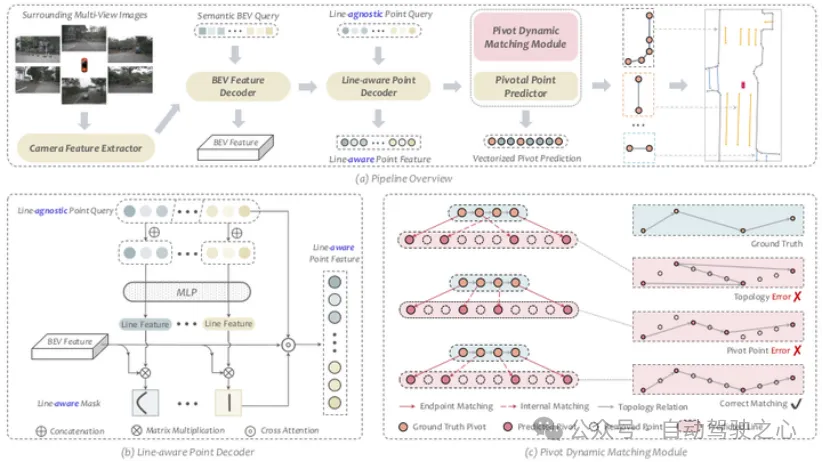
Pivotnet架構(gòu)
首先在query的設(shè)定上并沒有采用分級的架構(gòu),而是只有point query,在Line-aware Point Decoder模塊中,由最多N個point query concate起來經(jīng)過MLP得到Line feature,再與BEV feature相乘得到一個可學(xué)習(xí)的Line-aware mask,通過與BEV 語義分割的真值做bce loss和dice loss進行約束,得到query與instance的關(guān)系.
最關(guān)鍵的部分在于關(guān)鍵點預(yù)測和匹配模塊,不同于MapTR同樣數(shù)量的dt和gt做一對一匹配,這里先計算出一個實例的gt的T個關(guān)鍵點,T是動態(tài)變化的,然后在N個dt里找到最優(yōu)的T個組合,即為dt的關(guān)鍵點,剩下即為共線點,都是帶有順序的.為了提高效率,文中還使用了一些優(yōu)化措施.匹配結(jié)束后,利用對關(guān)鍵點和共線點不同的約束條件進行約束.實驗證明Pivotnet比起MapTR能夠更好地預(yù)測元素的形狀和角度.
7.MapVR(2023.10)[12]
[12] Online Map Vectorization for Autonomous Driving: A Rasterization Perspective
MapVR(Map Vectorization via Rasterization)通過一個額外的可微柵格化模塊來學(xué)習(xí)更好的向量化地圖,架構(gòu)如下:
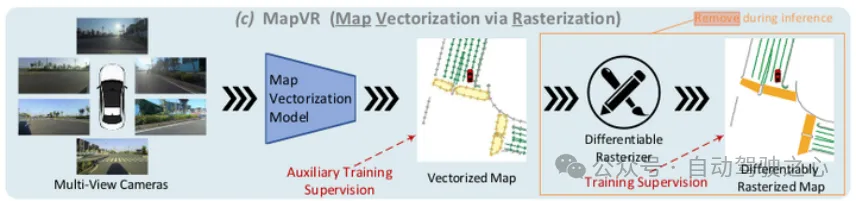
MapVR架構(gòu)
文中提出,類似MapTR的向量化地圖模型的問題是使用Chamfer distance做gt和dt的匹配存在兩個缺陷,一是沒有尺度不變性,即對于大尺度和小尺度地圖元素采用一樣的標準不合理,二是這種方式忽略了形狀和幾何特性,會得出不合理的結(jié)果,圖示如下:
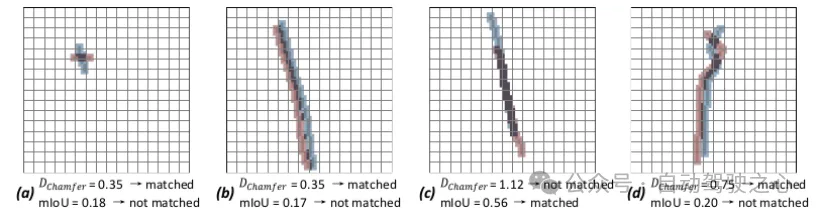
Chamfer Distance匹配的問題
而如果使用柵格化地圖,就可以以mIOU為標準,匹配更加準確,如下圖所示:
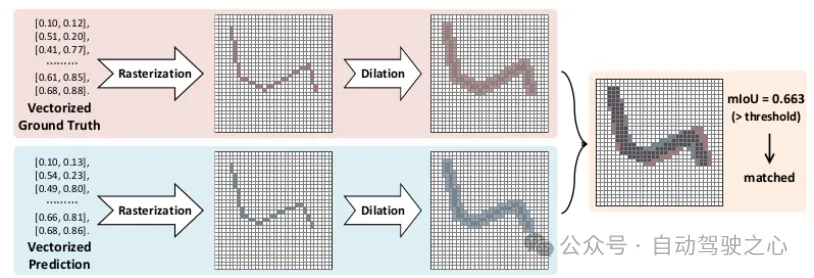
mIOU匹配
文中首次使用近期相關(guān)研究中提出的一種無參數(shù)的可微分的柵格化[11]來作為向量化地圖和柵格化地圖的橋梁.在訓(xùn)練階段可以更準確地實現(xiàn)gt和dt的匹配,使loss計算更加準確,幫助模型收斂,在推理階段可以移除這個模塊,輸出更好的向量化地圖.
[13] Soft rasterizer: A differentiable renderer for image-based 3d reasoning
8.MapEX(2023.11)[14]
[14] Mind the map! Accounting for existing map information when estimating online HDMaps from sensor data
在實際工程應(yīng)用中,往往還不能完全拋棄傳統(tǒng)高精地圖,但傳統(tǒng)高精地圖有著生成周期長,更新慢的缺點,MapEX就是利用已有的未更新的先驗地圖數(shù)據(jù),結(jié)合傳感器實時感知,給出一個實時的地圖結(jié)果,是一個非常有實際工程價值的模型,比起只使用傳感器輸入有質(zhì)的提升.
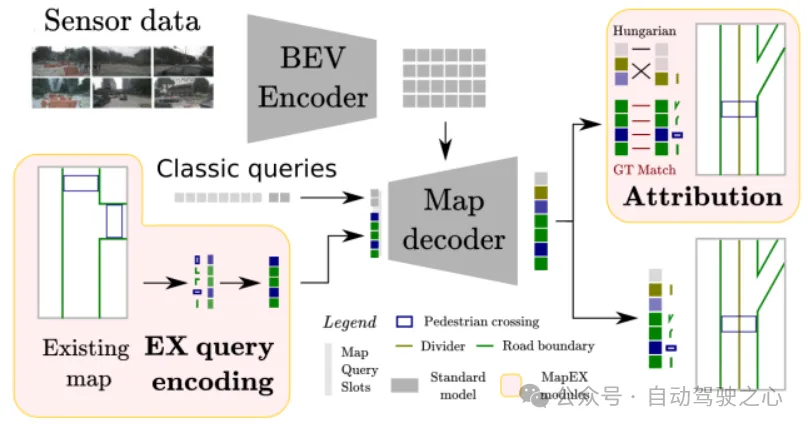
MapEX架構(gòu)
如果是在工程中存在發(fā)生變化的真實地圖數(shù)據(jù),那可以直接作為輸入的EX-GT(Existing map GT),如果使用開源數(shù)據(jù)集不存在發(fā)生變化的場景,文中做了一些場景模擬,來模擬地圖的變化,如元素缺失,元素加噪,元素徹底變化等等,隨機對GT做一些處理后作為輸入的EX-GT.
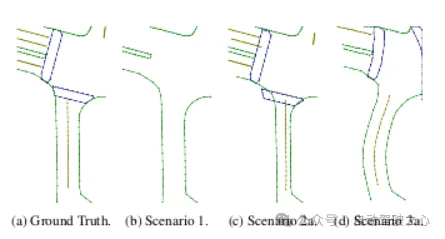
MapEX的模擬場景
MapEX的框架也是建立在MapTR框架的基礎(chǔ)上,將decoder原來使用的初始化query的一部分替換為從EX-GT的位置和類別編碼而來的EX-query,編碼的方式如下圖所示:

Ex query編碼
然后在匹配過程中并不是直接使用匈牙利匹配,而是對EX-query做一個預(yù)匹配,即對與真實GT實例的所有點的平均距離小于1m的EX-query直接匹配為對應(yīng)的GT,剩下的query再進行匈牙利匹配,降低模型學(xué)習(xí)的難度.這樣就可以充分利用已有地圖數(shù)據(jù)的先驗信息,得到更加準確的實時輸出.
另外MapEX還有一個地圖變化檢測模塊,即使用一個獨立的change detection query,與decoder每一層的全部query做cross-attention,融合所有query的信息,最后回歸出地圖變化的置信度.
9.GeMap(2023.12)[15]
[15] Online Vectorized HD Map Construction using Geometry
GeMap也是利用幾何先驗對地圖元素進行約束的模型.對比BeMapnet,PivotNet等模型,大多基于絕對坐標,不具備旋轉(zhuǎn)平移不變性,且沒有考慮到實例之間的相關(guān)性,如車道線之間一般平行,且距離與車道寬度有關(guān),車道線與路口一般垂直等.GeMap基于實例的位移矢量(displacement vectors),從它自身的形狀線索和不同位移矢量之間的相關(guān)性線索對輸出實例和點集進行約束,能夠更加準確地利用地圖元素的幾何特征.
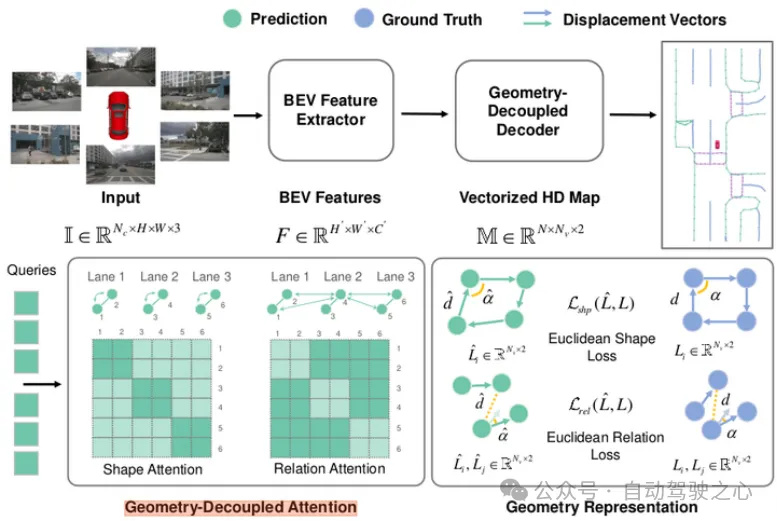
GEMap框架
具體是通過Geometry-Decoupled Attention和Euclidean loss實現(xiàn)的.前者設(shè)計了兩個解耦的attention模塊,通過不同的attention-mask,一個關(guān)注于實例內(nèi)部的形狀信息,一個關(guān)注于實例之間的相關(guān)性信息.后者是分別對形狀和相關(guān)性進行約束,公式如下(實際操作中使用了優(yōu)化效率的策略),另外也使用了segmentation, depth, dorection 和pts loss.
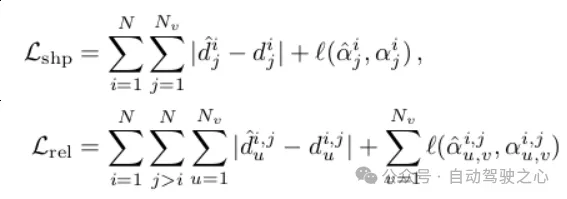
Euclidean Loss
10. ScalableMap(2024.1)[16]
[16] ScalableMap: Scalable Map Learning for OnlineLong-Range Vectorized HD Map Construction ScalableMap
ScalableMap使用一種類似于縮放的方式來更好地還原出地圖元素的結(jié)構(gòu)化信息,實現(xiàn)長距離場景的性能提升,在整個架構(gòu)上都做出了一些改進.
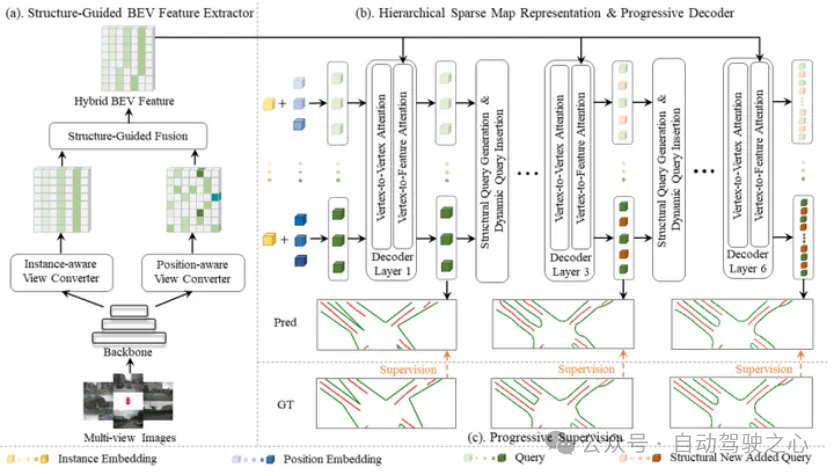
ScalableMap架構(gòu)
首先是BEV特征提取部分,第一步是分為兩個分支,一個通過DETR架構(gòu)得到類似BEVFormer的position-aware的全局BEV特征, 另一個利用MLP得到的基于每個視角的instance-aware的k個BEV特征,多視角BEV特征再通過線性層融合成為統(tǒng)一的BEV特征.第二步是兩個BEV特征經(jīng)過Structure-Guided 特征融合模塊,并加入一個額外的分割頭,對兩個BEV特征分別進行矯正和融合,使其同時具備準確的位置和形狀信息.
其次是使用漸進的Decoder來實現(xiàn)多尺度的地圖表示和監(jiān)督,核心是HSMR策略,即定義地圖密度為地圖元素中曲率超過閾值的頂點數(shù)量, 獲得漸進的不同密度的地圖元素表示.在gt中,對頂點過多的元素進行采樣,對頂點較少的元素進行插值,可以獲得不同密度的gt; 在Decoder每層的query設(shè)定中,采用動態(tài)插入的方法,即利用相鄰頂點之間的位置約束生成新的query,動態(tài)地插入到原始query序列中,以此獲得不同密度的query序列.
在loss約束上也使用漸進的loss約束,一是Vertex loss, 分別對原始頂點和新加入的頂點進行約束,前者使用L1 loss,后者使用頂點到所屬邊的距離,二是Edge Loss對形狀進行約束.
11.mapNeXt(2024.1)[17]
[17] MapNeXt: Revisiting Training and Scaling Practices for Online Vectorized HD Map Construction
mapNeXt是從實際工程的角度對mapTR進行優(yōu)化.首先通過分析mapTR對gt的置換等價處理,即對每個gt增加所有可能的排列再進行匈牙利匹配,發(fā)現(xiàn)如果使用無序的Chamfer Distance作為距離代價,可以忽略置換等價帶來的影響.作者通過增加decoder中query的組數(shù),采用并行的方式進行一對一的匈牙利匹配,得到了較好的效果,且不影響推理效率.另外沒有采用隱式的位置編碼,而使用顯式的無參數(shù)的sin位置編碼提供位置先驗可以提升效率.
在模型遷移和縮放方面,分析了各種預(yù)訓(xùn)練模型的性能,由于decoder增加了更多的query,選擇使用更強的VoVNetV2 backbone+FFN并做了規(guī)模擴展的適配,而且在使用PETRv2的nuScenes BEV地圖分割任務(wù)上預(yù)訓(xùn)練,實現(xiàn)更好的模型遷移.
12.Stream Query Denoising(SQD)(2024.1)[18]
[18] Stream Query Denoising for Vectorized HD Map Construction
Stream Qurty Denoising(SQD)是在StreamMapNet[4]的基礎(chǔ)上進一步結(jié)合了去噪的思想,幫助模型更好的收斂.去噪的思想由DN-DETR[19]等一系列論文啟發(fā),是通過對gt加噪聲構(gòu)建denoise query,直接綁定對應(yīng)的gt而不需要匈牙利匹配,使transformer減少被匈牙利匹配不穩(wěn)定的特性所影響,實現(xiàn)更快的收斂.
[19] Dn-detr: Accelerate detr training by introducing query denoising.
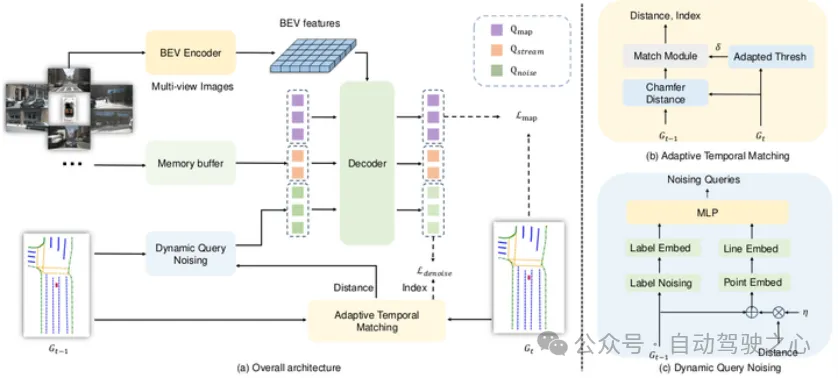
SQD架構(gòu)
SQD整個架構(gòu)與StreamMapNet類似,通過stream的方式實現(xiàn)時序融合,包括bev feature的融合和top k query的融合,這里前序幀query對應(yīng)的gt,以及前序幀的bev feature都根據(jù)ego-motion進行了轉(zhuǎn)換.
SQD核心改進在于Denoising模塊,和DN-DETR不同的是SQD是對前序幀的gt進行加噪.首先針對curve的特性,采取和bbox不同的加噪方式: line shifting, angular rotation, 和scale transformation,再編碼成位置嵌入,構(gòu)造noise query,和當前幀的query以及前序幀的top k query進行拼接,一起輸入decoder.
進一步地,文中考慮到前一幀gt轉(zhuǎn)換到當前幀后可能帶來的偏差,如新增,缺失,位置偏差等,設(shè)計了Adaptive Temporal Matching和Dynamic Query Noising模塊作為補充和增強.前者計算了前序幀經(jīng)過時序轉(zhuǎn)換以后和當前幀的Chamfer Distance,只把小于閾值的gt用來與當前幀的query做匹配.后者在對前序幀加噪的過程中設(shè)計了decay rate,結(jié)合實例的變化尺度進行有針對性的加噪.
13.ADMap(2024.1)[20]
[20] ADMap: Anti-disturbance framework for reconstructing online vectorized HD
ADMap架構(gòu)
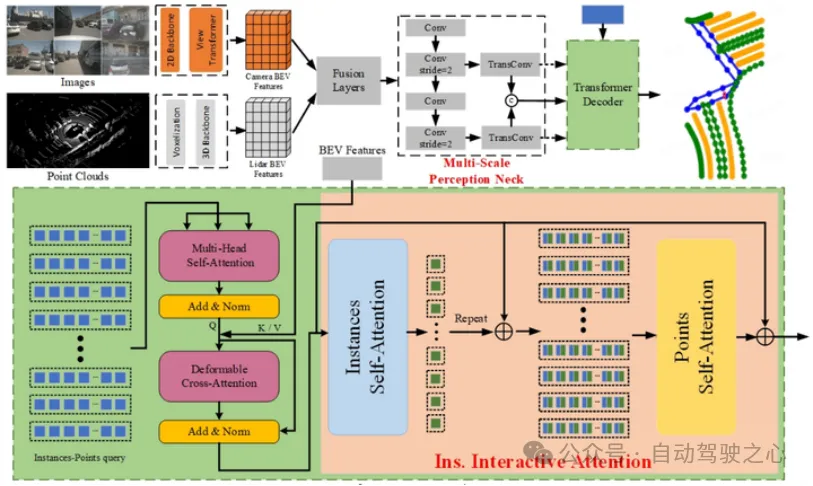
ADMap提出由于MapTR預(yù)測的點會發(fā)生抖動和移位,導(dǎo)致預(yù)測的實例會變得扭曲和鋸齒狀.為了提高模型的抗干擾能力,在MapTR的基礎(chǔ)上對網(wǎng)絡(luò)和Loss做出一些改進,主要有三個部分:Multi-Scale Perception Neck (MPN), Instance Interactive Attention (IIA) and Vector Direction Difference Loss(VDDL).
MPN類似于FPN,將bev feature通過下采樣和上采樣得到不同尺度的bev 特征,便于decoder能得到多尺度的信息.
IIA首先在分級query(instance query 和point query)設(shè)計的基礎(chǔ)上,改變了MapTR中instance query的生成方式:通過point query的維度轉(zhuǎn)換和多層MLP學(xué)習(xí)而來,先經(jīng)過Instance-self-attention進行實例之間的信息交互,再與point query相加,經(jīng)過Points-self-attention學(xué)習(xí)實例內(nèi)部的點之間的信息交互.
VDDL則設(shè)計了帶權(quán)重的向量方向損失,來進一步約束實例向量的形狀和方向.方向損失由逐點與gt的夾角余弦獲得,權(quán)重取決于gt的方向變化,即對方向變化劇烈的實例給予更大的權(quán)重.
14.MapQR(2024.2)[21]
MapQR致力于在MapTR的基礎(chǔ)上進一步挖掘查詢機制(query)的潛力,只使用instance query,共享同一地圖中的內(nèi)容信息,避免使用points query發(fā)生同一地圖元素的信息不一致性,同時可以減少計算量.
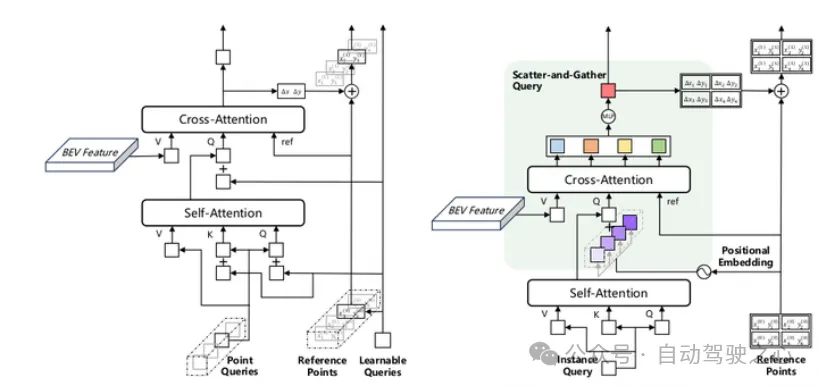
MapTR和MapQR的Decoder對比
作者稱這種實例查詢機制為Scatter-and-Gather Query,首先定義N個Instance query,經(jīng)過self-attention后通過Scatter操作每個擴展為n個副本,根據(jù)不同的n個reference points生成不同的Positional Embedding,再concate后輸入cross-attention,最后將輸出的query通過Gather操作恢復(fù)為instance query,每個query負責(zé)預(yù)測n個點.另外,在reference points的設(shè)計上,MapQR考慮了不同高度的影響.
15.EAN-MapNet(2024.2)[22]
[22] EAN-MapNet: Efficient Vectorized HD Map Construction with Anchor Neighborhoods
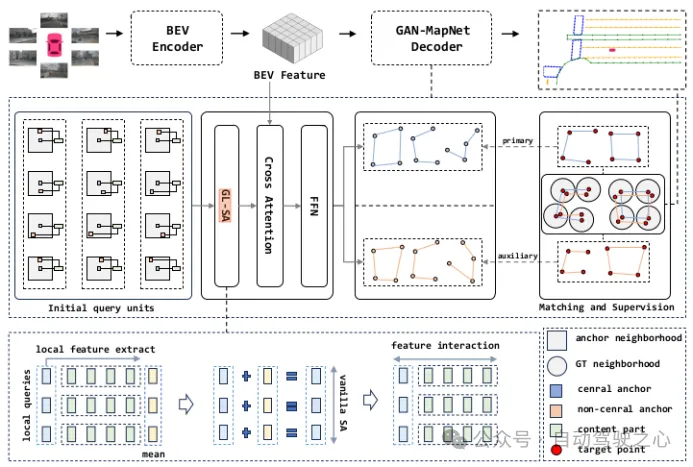
EAN-MapNet架構(gòu)
EAN-MapNet提出,建圖模型一般使用DETR decoder,這種query構(gòu)建機制缺少對地圖元素臨近的局部位置特征的關(guān)注,所以參照anchor思想,在BEV空間初始化多組anchors,每個anchor設(shè)計了查詢單元(query units)機制,由neighborhood central query和non-neighborhood central query構(gòu)成,同樣GT除了target points, 也在半徑為r的區(qū)域增加gt neighborhoods,neighborhood central query與target points相匹配,non-neighborhood central query與gt neighborhoods中的隨機點相匹配.
文中還設(shè)計了Grouped local self-attention(GL-SA)模塊適應(yīng)這種query機制,分為局部特征提取,組間特征交互,組內(nèi)特征交互三步,以更好地利用局部特征.損失函數(shù)方面也同時考慮了center和none-center區(qū)域的損失.
16.HIMap(2024.3)[23]
[23] HIMap: HybrId Representation Learning for End-to-end Vectorized HD Map Construction
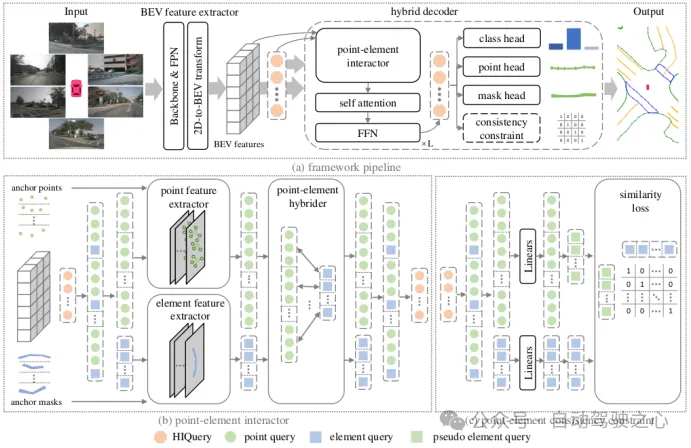
HIMap架構(gòu)
HIMAP也是在query機制和decoder設(shè)計上對MapTR進行改進,使模型能夠更好地學(xué)到實例級的特征.首先設(shè)計了混合的HIQuery,包含E個element query和E* P個point query,再把兩種query分別輸入element特征提取器(參照Masked Attention[24])和point特征提取器(參照DAB-DETR[25]),point query屬于一個實例的positional embedding的加權(quán)和作為element query的positional embedding.更新好的point query和elementquery會輸入point-element hybrider進行信息融合,具體方式是屬于同一個實例的point query會與對應(yīng)的element query相加,然后每個element query會與對應(yīng)的所有point query的加權(quán)和相加,這樣point query 和element query都同時擁有了點的信息和實例信息,再作為新的HIMAP輸入下一層decoder.
[24] Masked-attention mask transformer for universal image segmentation.
[25] Dab-detr: Dynamic anchor boxes are better queries for detr.
為了保證point query和element query的一致性,作者做了一致性約束,即計算point query的加權(quán)和與對應(yīng)的element query的交叉熵加到總loss中.
17.MapTracker(2024.3)[26]
[26] MapTracker: Tracking with Strided Memory Fusion for Consistent Vector HD Mapping
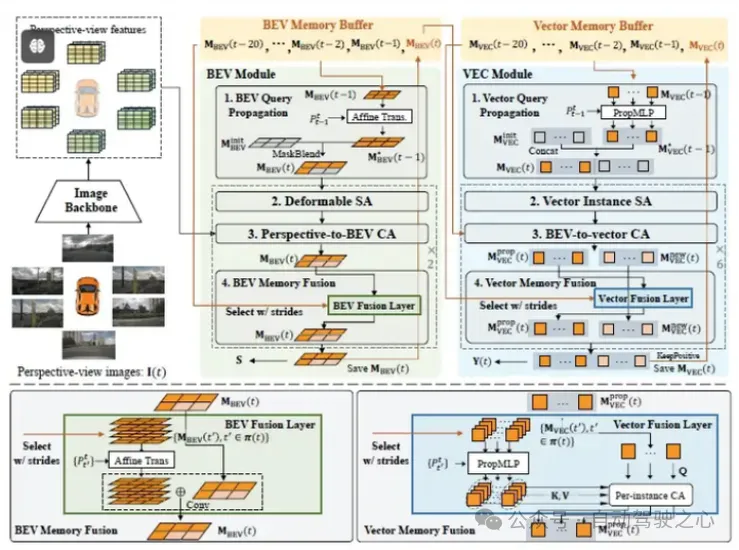
MapTracker架構(gòu)
MapTracker是用跟蹤的方式更好地進行時序增強,從而使建圖更加準確和一致性,魯棒記憶機制是核心.文中借鑒MOTR[27]的端到端目標跟蹤思想,一共用到兩種記憶機制,一是BEV feature的記憶,會從前面10幀中選取更接近1m/5m/10m/15m的4幀,經(jīng)過ego-motion轉(zhuǎn)換后用兩層卷積層融合.二是Vector記憶,每幀由100個新初始化的vector和若干歷史幀保存的預(yù)測score超過閾值的positive vector經(jīng)過時空變換和MLP拼接而成,對應(yīng)于同一個地圖元素的歷史vector會被融合.
[27] MOTR: End-to-End Multiple-Object Tracking with Transformer
訓(xùn)練過程中同時考慮BEV loss,VEC loss和Transformation loss,同時對BEV特征,地圖元素匹配和跟蹤,時序融合的一致性進行約束.采用增強每幀的幾何特性,前后兩幀之間建立匹配關(guān)聯(lián)的方式提高gt的一致性,并采用帶有一致性信息的mAP做為評測標準.文中沒有具體說推理機制,應(yīng)該與訓(xùn)練機制一致.
18.P-MapNet(2024.3)[28]
[28] P-MapNet: Far-seeing Map Generator Enhanced by both SDMap and HDMap Priors
P-MapNet是除MapEX[14]外另一種結(jié)合已有地圖先驗來輔助當前建圖的方式,與MapEX采用直接替換query不同,P-MapNet主要使用cross-attention和MAE[29] finetune的方式來融合二者信息.
[29] Masked autoencoders are scalable vision learners.
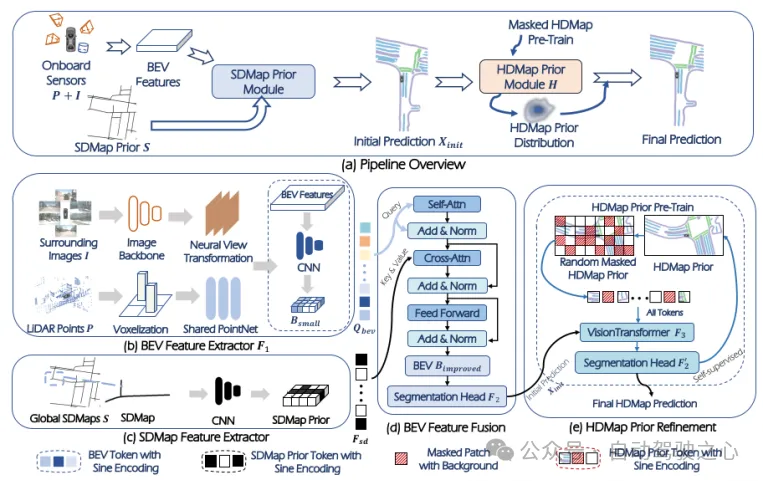
P-MapNet架構(gòu)
文中同時利用了比較粗的SDMap和比較精細的HDMap先驗進行信息融合.首先是SDMap融合模塊.SDMap信息可以從GPS獲取,經(jīng)過CNN網(wǎng)絡(luò)得到SDMap特征,與傳感器(包括camera/lidar)融合和視角轉(zhuǎn)換得到的BEV feature(經(jīng)過下采樣)通過cross attention進行融合,再接一個segmentation head得到一個較粗的分割地圖.
然后是HDMap融合模塊.這里首先有一個MAE預(yù)訓(xùn)練步驟,與原生的MAE不同,這里的預(yù)訓(xùn)練是輸入帶有mask的柵格地圖原始image,再通過一個segmentation head輸出語義分割地圖,與原生MAE的作用相同,都是作為一個具有較強恢復(fù)能力的autoencoder,結(jié)構(gòu)大體是VIT+segmentation head.預(yù)訓(xùn)練結(jié)束后,將SDMap和傳感器融合的segmentaion結(jié)果輸入MAE,得到refine的segmention結(jié)果.
看到這大家可能有點confused, 最后對上面18個模型做個簡短的總結(jié):
使用地圖元素的幾何特性進行約束: BeMapNet, PivotNet, GeMap, ADMap
對MapTR 的query機制進行改進: MapTRv2, StreamMapNet, InsightMapper, ADMap, MapQR, EAN-MapNet, HIMap
時序優(yōu)化: StreamMapNet, SQD(加去噪), MapTracker(跟蹤)
使用先驗信息: MapPrior, MapEX, P-MapNet
其他: MapVR(柵格化輔助), mapNeXt(工程優(yōu)化)












