













Apollo速度規劃都有什么?詳解阿波羅動態規劃&軌跡優化!
本文經自動駕駛之心公眾號授權轉載,轉載請聯系出處。
Apollo速度規劃分為:DP(動態規劃)+ QP(軌跡優化)兩部分。
DP給出一個粗解,為了開辟一個凸空間,然后再由osqp/ipopt來做優化平滑。
1. ST坐標系中的S:
- 路徑規劃中的SL坐標系:S是參考線上的s;
- 速度規劃中的ST坐標系:S是路徑規劃輸出的路徑上的s;
2. 基于動態規劃的速度規劃
task:SPEED_HEURISTIC_OPTIMIZER
Apollo自動駕駛planning縱向速度規劃之DP詳解 - 知乎 (zhihu.com)
Planning 基于動態規劃的速度規劃 - 知乎 (zhihu.com)
基于處理好的ST圖,通過采樣構建一個二維的cost_table,并對每一格計算cost值,從而通過動態規劃算法,得到一條粗的最優ST軌跡。
一般動態規劃問題包括以下幾個步驟:
- 確定狀態變量
- 設計狀態轉移方程
- 初始化邊界
- 返回結果
- 狀態變量
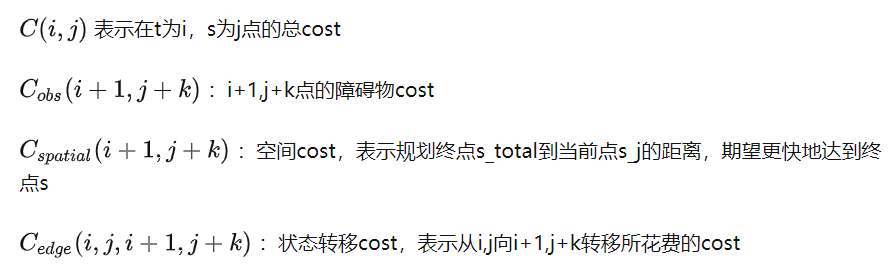
狀態變量的定義就是StGraphPoint, 從代碼的定義我們可以看到,每個狀態點保存了:
- 當前柵格的位置信息point_,
- 優化后的速度(optimal_speed_),
- 參考速度cost (reference_cost_),
- 障礙物cost(obstacle_cost_),
- 空間距離cost (spatial_potential_cost_),
- 當前點總的cost(total_cost_)
- 狀態轉移方程
總體狀態轉移方程如下:
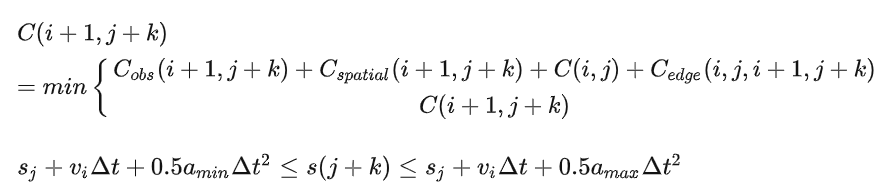
其中k表示了在最大加減速度約束下,從i時間j位置向i+1時間轉移可達范圍內的所有點
遍歷從(0,0)點開始,向(1,k)逐步遍歷。對于遍歷點C(i+1,j+k)會比較其本身cost和從C(i,j)轉移到C(i+1,j+k)的cost中最小cost作為其新的cost。
3. 基于osqp的二次速度規劃
task:PIECEWISE_JERK_SPEED_OPTIMIZER
apollo PiecewiseJerkSpeedProblem 速度優化 QP 數學推導 - 知乎 (zhihu.com)
Planning 基于二次規劃的速度規劃 - 知乎 (zhihu.com)
- 優化變量

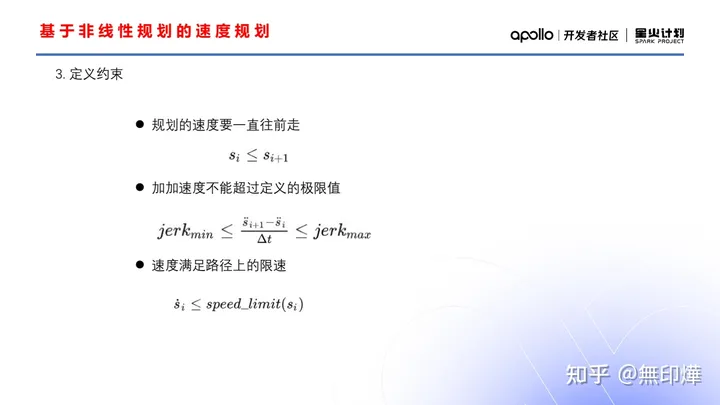
- 目標函數
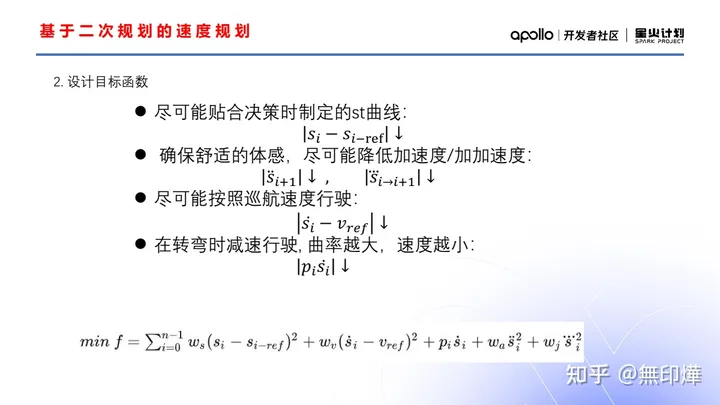
第4項的 :根據決策制定的速度分配確定的 i 時刻的曲率確定的權重;是曲率關于時間t的函數

但是這里如果曲線優化后,在對應時間的s就不是參考位置的s了,曲率的懲罰也不是優化后對應位置的曲率,所以apollo還提供了一直非線性規劃方法。
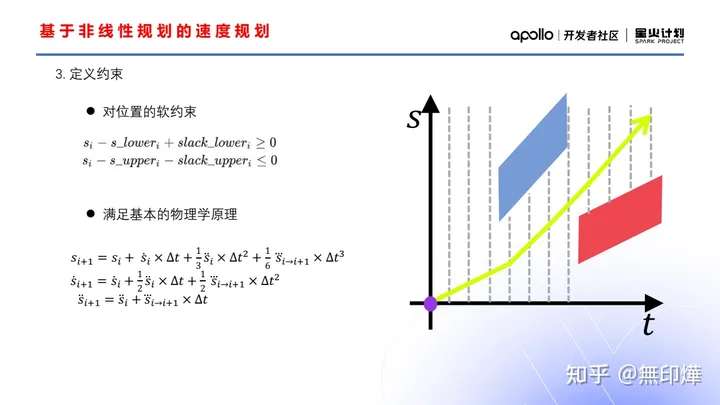
4. 基于ipopt的非線性速度規劃
task:PIECEWISE_JERK_NONLINEAR_SPEED_OPTIMIZER
osqp二次規劃存在的問題
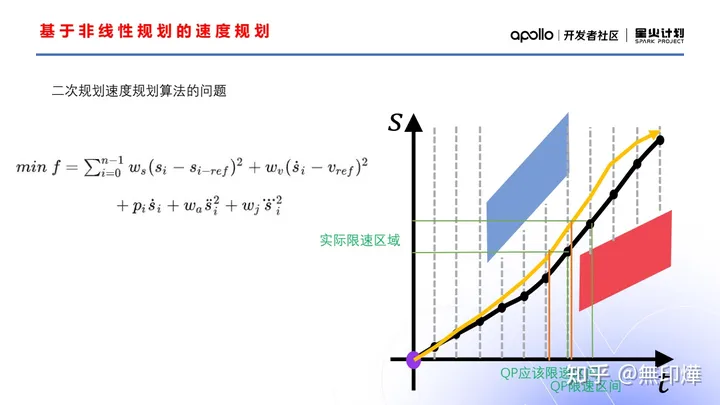
二次規劃的曲率規劃的懲罰pi是曲率關于時間t的函數,但實際上路徑的曲率是和s相關的。
二次規劃的速度規劃通過對動態規劃粗糙的st曲線,將關于s的區域懲罰轉化為關于t的區域的懲罰,此時如果平滑后的曲線和原來動態規劃的st曲線相差不大的時候,其懲罰位置是正確的,如果平滑后的曲線和原始的動態規劃的st曲線相差較大,實際的懲罰區間就和設定的不一樣。
比如上圖中應該懲罰的區間為橙色區間,而二次規劃算法實際對于曲率懲罰的區域是在綠色的區域。還有比如地圖的限速約束也是和s相關的,所以這樣的問題就在于,限速或者曲率的函數是關于s的函數,而s又是待求的量(優化量),就無法對目標函數施加速度約束或者曲率的約束,只能通過動態規劃的st曲線進行轉化,轉化成t的函數再施加約束,但這樣就會導致二次規劃算法的st曲線的速度約束不精確的問題。
ipopt非線性規劃求解
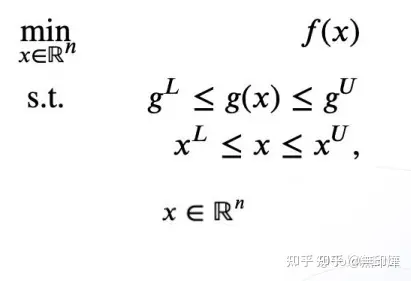
f(x)為代價函數,g(x)為限制條件,f(x)和g(x)都可以為非線性或者是非凸的函數,但必須為二次連續可微(及二階導數是連續的);
非線性優化器求解主要是考慮路徑曲率對速度規劃的影響,因為曲率約束是一個非線性的函數。
Planning 基于非線性規劃的速度規劃 - 知乎 (zhihu.com)
- 速度點集的osqp優化平滑
- 道路曲率的osqp優化平滑
- 道路限速的osqp優化平滑
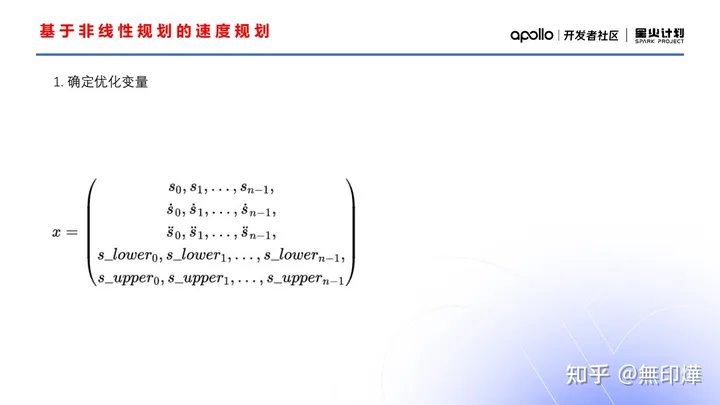
等間隔的時間采樣,s,s一階導數,s二階導數,以及s的兩組松弛變量,用于避免求解失敗
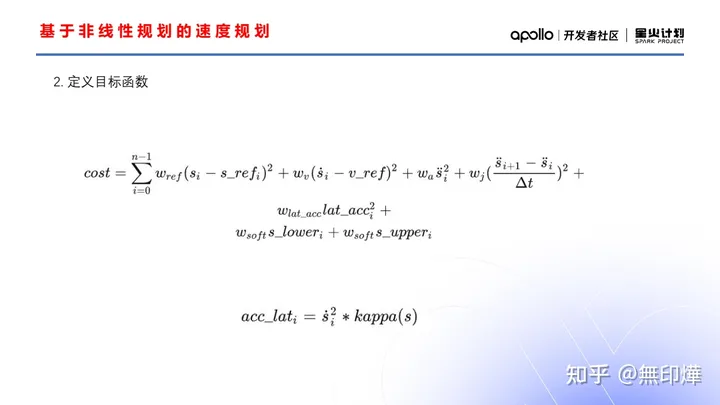
額外加入了橫向加速度和松弛變量的優化。
橫向加速度和曲率有關,由于曲率是關于s的關系式,這里還要對該曲率進行進一步的平滑 ,因為對于非線性規劃求解器,無論是目標函數還是約束都是要求函數能夠二階可導:
曲率之前是怎么來的呢?
上節課講到了,規劃路徑是通過分段多項式的二次規劃算法求得的,每一段的s和l都是保持的三階導為定值的一個多項式的曲線關系,它可以保證sl是二階可導,但是求得s的曲率實際上并不是二階可導的,所以這里需要對曲率曲線重新做一個擬合,生成s關于曲率二階可導的一個關系式。這里apollo同樣采用分段多項式的方法獲得s關于曲率kappa的關系式。首先對s進行采樣,然后求解s關于曲率的分段多項式的關系式。
限速函數既不連續也不可導,所以要對限速曲線進行平滑;
對于速度規劃問題,我們如何計算一個初始解:
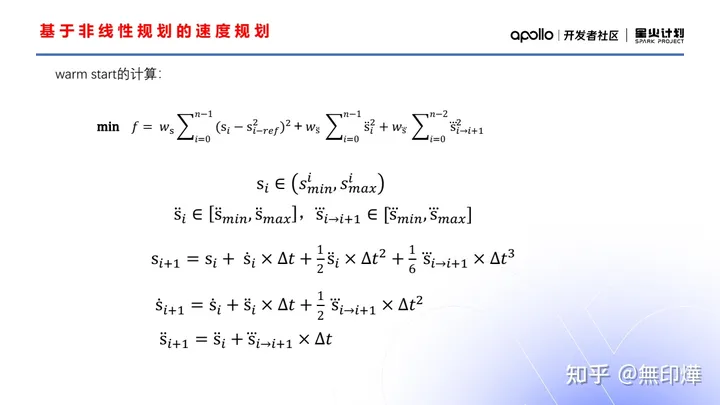
分段多項式二次求解作為非線性規的初值

原文鏈接:https://mp.weixin.qq.com/s/GJO8_DwyJHI2rQ0j05dGYw




















