谷歌逆天「夜視」拍照突然火了!完美降噪還能合成3D視角
最近,網(wǎng)上一段來自谷歌的AI夜景拍攝視頻被刷爆了!

視頻中的這個技術叫RawNeRF,顧名思義就是NeRF的一個全新變體。
NeRF是一種全連接神經(jīng)網(wǎng)絡,使用2D圖像的信息作為訓練數(shù)據(jù),還原出3D場景。
RawNeRF比起之前的NeRF,有了多處改進。不僅能完美降噪,還能改變相機視角,調(diào)整焦點、曝光和色調(diào)映射。谷歌的這篇論文于2021年11月發(fā)表,并被CVPR 2022收錄。

項目地址:https://bmild.github.io/rawnerf/
黑夜中的RawNeRF
在此之前,NeRF是使用色調(diào)映射的低動態(tài)范圍LDR圖像作為輸入。
而谷歌的RawNeRF改為直接在線性原始圖像上進行訓練,可以保留場景的完整動態(tài)范圍。
在合成視圖領域,處理黑暗的照片一直是一個難題。
因為在這種情況下,圖像中的細節(jié)極少。而且這些圖像讓我們很難把新視圖拼接到一起。

還好,我們有一個新的方案——使用原始傳感器(RAW sensor data)的數(shù)據(jù)。
就是像這樣的一張圖,這樣,我們就有了更多的細節(jié)。
不過,仍然存在一個問題:噪點也多了。

所以我們必須做個選擇:是更少的細節(jié)和更少的噪點,還是選擇更多的細節(jié)和更多的噪點。
好消息是:我們可以使用圖像降噪技術。

可以看到,降噪之后的圖像效果不錯,但要合成視圖,這種質(zhì)量還是不夠。
不過圖像降噪技術給我們提供了一個思路:既然可以給單個圖像去噪,那也可以給一組圖像去噪。
讓我們來看看RawNeRF的效果。

而且,它還有更多令人驚喜的功能:對基礎數(shù)據(jù)進行色調(diào)映射,從深色圖像中提取更多細節(jié)。

比如改變圖像的焦點,營造出很棒的景深效果。

更厲害的是,這個還是實時的。

此外,圖像的曝光也會隨著焦點的變化而產(chǎn)生相應的變化!

接下來,就讓我們看看RawNeRF的五個經(jīng)典的應用場景吧。
五大經(jīng)典場景
1. 圖像清晰度
看這張圖像,你能看到路牌上的信息嗎?

可以看到,經(jīng)過RawNeRF處理后,路牌上的信息就清晰多了。
在下面這個動圖里,我們可以清晰地看到原始的NeRF技術和RawNeRF在圖像合成上的區(qū)別。

其實,所謂的NeRF也并不是多古老的技術,時間才剛剛過了2年而已……
看得出來,RawNeRF在高光的處理上,表現(xiàn)得還是非常出色的,我們甚至能看到右下角車牌周圍的高光變化。
2. 鏡面高光
鏡面高光屬于非常難捕捉的對象,因為在移動相機時,它們會發(fā)生很大的變化,而且照片之間的相對距離也比較遠。這些因素對于學習算法來說,都是巨大的挑戰(zhàn)。
在下面這張圖中可以看到,RawNeRF所生成的鏡面高光可以說是相當還原了。

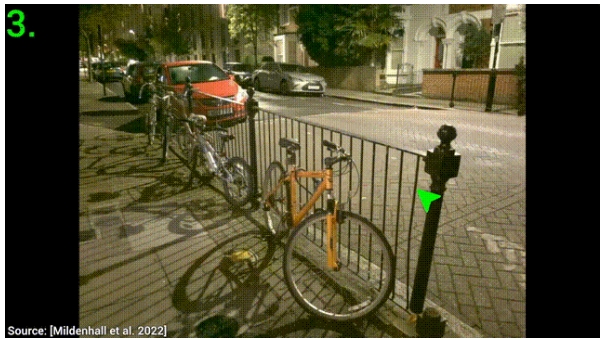
3. 薄的結構
即使在光線充足的情景中,以前的技術對于柵欄的顯示效果也并不好。

而RawNeRF即使處理有一堆柵欄的夜間照片,也妥妥hold得住。
即使在柵欄與車牌重合的地方,效果依然很好。
4. 鏡面反光
路面上的反光,是一種更有挑戰(zhàn)性的鏡面高光。可以看到,RawNeRF也處理得非常自然,非常真實。

5. 改變焦點,調(diào)整曝光
在這個場景中,讓我們試試改變視角,不斷變換焦點,同時調(diào)整曝光。

在以前,要完成這些工作,我們需要從25到200張照片的集合。
而現(xiàn)在,我們只需要幾秒鐘,就可以完成拍攝了。
當然,RawNeRF現(xiàn)在并不完美,我們可以看到,左邊的RawNeRF圖像和右邊的真實照片,還是有一些差異。

不過,從一組充滿噪點的原始圖像達到現(xiàn)在這樣的效果,RAWnerf已經(jīng)取得相當大的進步了。要知道,兩年前的技術還完全做不到這樣。
RAW的好處
簡單回顧一下,NeRF訓練管線所接收的是經(jīng)過相機處理的LDR圖像,之后的場景重建和視圖渲染,基于的都是LDR色彩空間。因此,NeRF的輸出實際上已經(jīng)是經(jīng)過了后期處理的,想要大幅修改和編輯是不可能了。
相比而言,RawNeRF是直接在線性原始HDR輸入數(shù)據(jù)上訓練的。由此產(chǎn)生的渲染結果可以像任何原始照片一樣進行編輯,如改變焦點和曝光等等。

由此帶來的好處主要有兩點:HDR視圖合成和降噪處理。
在亮度變化極大的場景中,固定的快門速度不足以捕捉到全部動態(tài)范圍。RawNeRF模型則可以同時對短曝光和長曝光進行優(yōu)化處理,從而恢復完整的動態(tài)范圍。
例如(b)中的這種大光比場景,就需要更復雜的局部色調(diào)映射算法(例如HDR+后期處理),才能同時保留暗部的細節(jié)和室外的高光。
此外,RawNeRF還可以使用線性顏色渲染具有正確飽和的「虛化」亮點的合成失焦效果。

在圖像噪點的處理上,作者進一步地將RawNeRF在完全未經(jīng)處理的HDR線性原始圖像上進行了訓練,使其變成了一個能處理幾十甚至幾百張輸入圖像的「降噪器」。
這種魯棒性也就意味著,RawNeRF可以出色地完成在黑暗中重建場景的任務。
例如在(a)這個只有一根蠟燭照明的夜景中,RawNeRF可以從嘈雜的原始數(shù)據(jù)中提取出本來會被后期處理破壞的細節(jié)(b,c)。

作者介紹
論文的第一作者Ben Mildenhall是谷歌研究院的一名研究科學家,從事計算機視覺和圖形方面的問題。

他在2015年于斯坦福大學取得計算機科學和數(shù)學學士學位,并在2020年于加州大學伯克利分校取得計算機科學博士學位。

剛剛結束的CVPR 2022,可以說是Ben的高光時刻了。
7篇錄用論文中有5篇拿下Oral,并且還有一篇獲得了最佳學生論文的榮譽提名。

網(wǎng)友評論
視頻一出,立馬驚艷了眾網(wǎng)友。大家一起腦洞大開。






看這技術進步的速度,要不了多久,夜間拍照再也不用愁了~