求解自動駕駛倫理困境:轉(zhuǎn)化道德規(guī)范為數(shù)學(xué)方程
一輛失控的列車在鐵軌上行駛,在它行進(jìn)的軌道上,有五個人被綁起來,列車即將要碾壓過他們。此時,你站在改變列車軌道的操縱桿旁。如果拉動此桿,則列車將切換到另一條軌道上。但是,另一條軌道上也有一個人被綁著。面對以下僅有兩種選擇,你會如何做?
- 什么也不做,讓列車按照正常路線碾壓過這五個人。
- 拉下操縱桿,改變?yōu)榱硪粭l軌道,使列車壓過另一條軌道上的那個人。
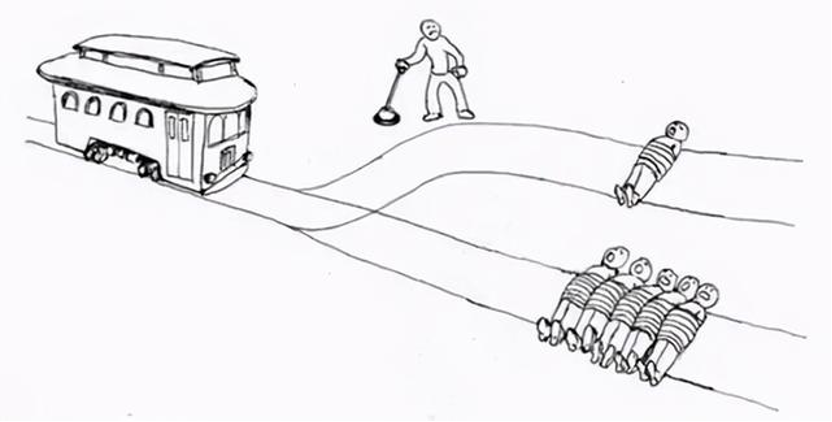
這就是倫理學(xué)中著名實(shí)驗——“電車難題”(Trolley problem)。
對于最終在公共道路上引入自動駕駛汽車,技術(shù)角度只是一個方面。另一個非常重要的難題是,在一些情景下自動駕駛汽車將不得不做出對人類來說也非常困難的道德抉擇。
在不可避免的汽車碰撞中,自動駕駛汽車該如何選擇前進(jìn)方向或碰撞的目標(biāo)?
當(dāng)前關(guān)于自動駕駛倫理已經(jīng)有了很多理論研究,但是將這些倫理問題整合起來并實(shí)際應(yīng)用于自動駕駛軌跡規(guī)劃中的研究卻少之又少。近日,來自德國慕尼黑工業(yè)大學(xué)的Maximilian Geisslinger、Franziska Poszler等研究團(tuán)隊在《哲學(xué)與技術(shù)》(Philosophy & Technology)上發(fā)表了一篇標(biāo)題為《自動駕駛倫理:從電車問題到風(fēng)險倫理》(Autonomous Driving Ethics: from Trolley Problem to Ethics of Risk)的研究報告,將道德規(guī)范轉(zhuǎn)化為數(shù)學(xué)方程,提出了一個用于軌跡規(guī)劃的風(fēng)險成本函數(shù),綜合考慮了整體風(fēng)險的最小化、最壞情況的優(yōu)先級和人類的平等性。
論文從電車難題引入,進(jìn)行倫理準(zhǔn)則方面的討論。電車難題代表一種困境:兩個維度創(chuàng)造出一個道題沖突。第一個維度是,五個人的生命是否比一個人的更有價值?第二個維度涉及干預(yù)的程度,沒有做出努力避免讓一個人死亡與主動殺死一個人區(qū)別很大,這不僅僅是法律意義上的。從道德角度來看,需要的干預(yù)越強(qiáng),人們越難積極做出有利于挽救更多生命的決定。
與電車不同的是,自動駕駛汽車的軌跡規(guī)劃沒有任何初始設(shè)置,但算法會計算出所有的軌跡。對自動駕駛來說,算法可以在一秒內(nèi)計算并做出決定,而人類在這種情境下會驚慌而按照本能行動。
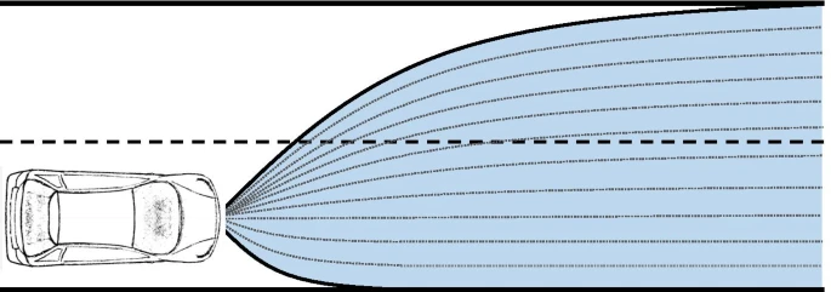
自動駕駛軌跡規(guī)劃的示意圖,藍(lán)色區(qū)域代表所有可能的所有物理上的可能軌跡。虛線是可能區(qū)域內(nèi)的示例性離散軌跡。
現(xiàn)有的倫理原則:功利主義、美德倫理與風(fēng)險倫理
為了構(gòu)造一個令人滿意的倫理結(jié)果,作者介紹了應(yīng)用于自動駕駛算法中處理道德困境的原則:現(xiàn)實(shí)代表性、技術(shù)可行性、通用性、社會接受性、可解釋性和透明性。
功利主義道德原則由英國哲學(xué)家杰里米·邊沁(Jeremy Bentham)提出,強(qiáng)調(diào)整體收益最大化。功利主義允許并提倡犧牲一個人以拯救更多人來做決策,因此可以通過設(shè)計成本函數(shù)來讓決策算法計算可能選項的成本,并從而選擇成本最低的一種,如可以選擇最大限度地減少車禍?zhǔn)芎θ说牟呗缘取?/p>
然而這里的核心問題是,為了讓整個社會獲得更大效用,抑制個人的效用是否正確和被允許。想象一下,一個人是否愿意選擇一輛自己會在危險情況下為了保護(hù)其他人而犧牲自己的自動駕駛汽車?
這背后還有一個根本性的問題,是應(yīng)該由實(shí)施自動駕駛汽車通用行業(yè)標(biāo)準(zhǔn)的制造商對整個社會實(shí)施強(qiáng)制性的道德設(shè)置,還是每個駕駛員都應(yīng)該選擇自己個人的道德設(shè)置?
而在功利主義之外,具有浪漫主義特征的美德倫理則是傾向于強(qiáng)調(diào)美德是一種個人的特質(zhì)。謹(jǐn)慎、勇氣、節(jié)制和正義均為人類的基本美德,因此在如今的人工智能倫理發(fā)展中,相關(guān)理論認(rèn)為:認(rèn)知機(jī)器應(yīng)該類比地展現(xiàn)這些優(yōu)點(diǎn)。
但是,機(jī)器內(nèi)的美德沒法進(jìn)行有解釋性地預(yù)先編程,這是其相對于功利主義的一個不足。現(xiàn)在的自動駕駛算法往往基于機(jī)器學(xué)習(xí)算法,可能產(chǎn)生不同的模式。開發(fā)者可以通過在訓(xùn)練模型的過程中將美德作為一種積極的獎勵信號加入,最終算法應(yīng)該可以識別需要進(jìn)行道德行動的情況,并且采取相應(yīng)的行動。
由此,這樣基于美德倫理學(xué)的策略也可以具有很好的通用性,但問題在于訓(xùn)練數(shù)據(jù)是無法很好表示極端情況的正確決策,同時,可解釋性和歸責(zé)也很難實(shí)現(xiàn)。
作者接著論述了第三種選擇:風(fēng)險倫理(處理在風(fēng)險情況下的道德正確行為)。風(fēng)險倫理有三種既定的決策參考:貝葉斯規(guī)則、最大化原則以及預(yù)防原則。
貝葉斯決策標(biāo)準(zhǔn)要求,當(dāng)面對不同的行動選擇時,選擇產(chǎn)生最大預(yù)期效用的特定行動。該預(yù)期效用由不同事件的發(fā)生概率和這些后果的指數(shù)/評級組成。
最大化原則可以被理解為,在無法獲得有關(guān)每種后果發(fā)生概率的信息的情況下避免最大損害。因此,決策者會選擇在最壞的預(yù)期情況下產(chǎn)生最少壞結(jié)果的替代行動。
預(yù)防原則遵循“安全總比后悔好”的座右銘,提倡謹(jǐn)慎和規(guī)避風(fēng)險,通過制定特定的法律來主動防止?jié)撛诘奈磥頁p害。
風(fēng)險倫理具有高透明度(在更可預(yù)測的意義上)、通用性(對風(fēng)險的考慮與具體情況無關(guān))、現(xiàn)實(shí)代表性(充分考慮不確定性),因此具有比較高的社會接受度。
然后,作者提出,據(jù)他所知,在軌跡規(guī)劃中還沒有實(shí)施了風(fēng)險倫理的技術(shù)方法。然后,理論上,策略結(jié)果的積累風(fēng)險可以很容易地計算和比較,從而反映在可被編程實(shí)現(xiàn)的數(shù)學(xué)表達(dá)中。
風(fēng)險倫理如何形成和實(shí)現(xiàn)?
為了對于風(fēng)險倫理框架的理解,可以想象一個具體情景:一輛自動駕駛汽車在自行車和卡車之間行駛,他的位置決定了其帶來的風(fēng)險,減少與自行車之間的距離,會將風(fēng)險轉(zhuǎn)移到騎車人身上,因為在與汽車發(fā)生碰撞的情況下,騎車人的后果被認(rèn)為要大得多,減少與卡車的距離則會導(dǎo)致風(fēng)險向自動駕駛汽車轉(zhuǎn)移。總的來說,最大限度降低自動駕駛汽車乘員的風(fēng)險是以犧牲弱勢道路使用者為代價的,例如騎自行車的人或行人。
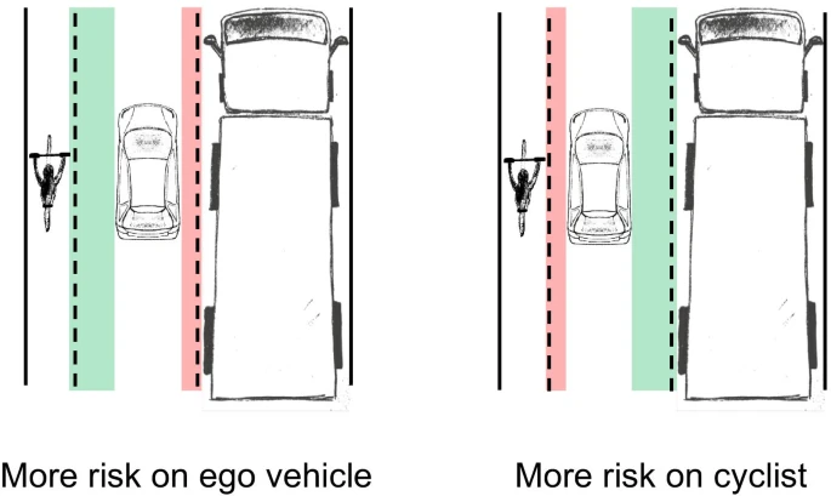
盡管這種為了保護(hù)自己而將風(fēng)險轉(zhuǎn)移給弱勢者的行為可能不符合最苛刻的倫理審視,也和康德強(qiáng)調(diào)的人的尊嚴(yán)不相容,但是Bonnefon等人的研究表明,大多數(shù)的參與者仍然傾向于稱作一個會不惜一切代價保護(hù)自己的自動駕駛汽車,而且也可能導(dǎo)致汽車制造商和自動駕駛技術(shù)提供者以這個準(zhǔn)備為指導(dǎo)進(jìn)行相關(guān)策略的設(shè)計。
當(dāng)考慮對風(fēng)險的計算和建模時,一般來說,其被定義為發(fā)生概率和估計后果的乘積。借助于這種定量的計算和對于策略后果的估計,前人已經(jīng)提出了相關(guān)的具體算法實(shí)驗,其中Leben強(qiáng)調(diào)了對于參與者生存幾率的估計和最大化,本文的作者提出的方法強(qiáng)調(diào)了概率和相關(guān)后果的風(fēng)險性的疊加。
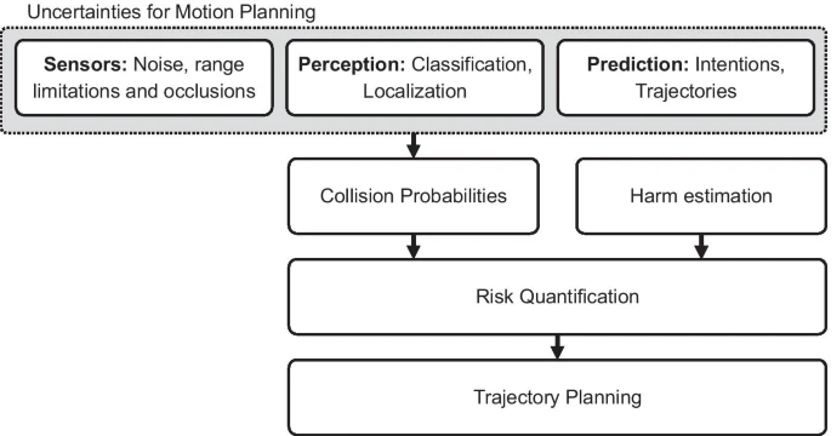
在這個二維的概率疊加中,需要同時估計碰撞的概率和對應(yīng)的后果的危害情況。其中碰撞概率的估計來自于自動駕駛過程中的各種不確定性的共同后果,而這些不確定性在上圖描述的運(yùn)動規(guī)劃的全過程中被逐步疊加,來自于車輛傳感器、感知系統(tǒng)和預(yù)測算法。
而危害的估計則更加的困難了,主要挑戰(zhàn)的便是對于“危害”這個抽象的數(shù)量的量化。從倫理的角度來看,尚不清楚應(yīng)如何量化不同類型的傷害并相互權(quán)衡。尤其是涉及到可能造成致命后果的極端事故時,這給我們帶來了巨大的困難。例如,我們無法權(quán)衡終身殘疾的嚴(yán)重傷害與死亡之間的關(guān)系。從道德的角度來看,將財產(chǎn)損失與人身傷害進(jìn)行比較就更加困難了。而使用經(jīng)濟(jì)后果(如貨幣價值)對傷害進(jìn)行量化的方法則需要準(zhǔn)確了解事故后果。事實(shí)上,在實(shí)踐中,事故的嚴(yán)重程度只能在一定程度上預(yù)測。但是這種危害量化預(yù)測的困難就帶來了對整個風(fēng)險道德模型的實(shí)現(xiàn)的困境。
基于這種困難,本文的作者出于對碰撞產(chǎn)生危害的物理性質(zhì)的思考,提出了參考物體動能和物體運(yùn)動狀態(tài)的風(fēng)險分布。這種分布的考察對于駕駛車輛和其他的道路參與者進(jìn)行了分別考慮,使得后續(xù)的策略制定可以實(shí)行不同的風(fēng)險偏好。
“三原則”在風(fēng)險估計中的運(yùn)用
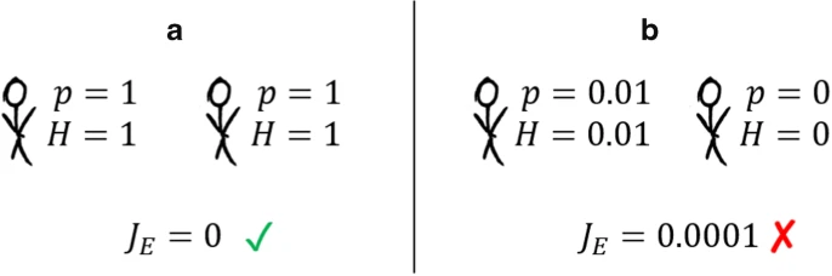
根據(jù)貝葉斯原理的要求,總的社會效益應(yīng)當(dāng)被盡量最大化,并且滿足功利考慮的需求。這意味需要尋找一個對于所有的參與者的收益期望最高的策略。但是另一方便,這種方法只追求總體風(fēng)險的最小化,沒有提供有關(guān)風(fēng)險關(guān)系的任何信息而且也沒有考慮公平性。出于對這種缺陷的改良,作者還加入了“平等原則”(Equality principle)的約束,要求通過最小化所考慮風(fēng)險的差異來平等分配風(fēng)險。
而這種平等原則在不加額外限制的情況下,可能會帶來人們預(yù)期之外的結(jié)果,比如在只有兩個參與者的情況下,單純地強(qiáng)調(diào)平等原則,可能會讓決策策略比起“一個人受輕傷另外一個不受傷”更喜歡兩個人均死亡。
最后,作者還強(qiáng)調(diào)了“極大極小原則”(Maximin principle),其被設(shè)計用來讓決策策略尋找使得“最大傷害”盡量最小的方案。而如果單獨(dú)考慮 這個原則,也有顯而易見的缺陷:單純強(qiáng)調(diào)最小化“可能”的最大傷害,而不考慮這種可能性的量化比較,這使得一個極大概率的較大傷害可能被認(rèn)為優(yōu)于極小概率的巨大傷害,這在很多時候不但于前文所述的基于概率分析的功利化的考慮矛盾,而且潛在地和人們樸素的道德取向不兼容。
因此,本文提出的所有三個原則都存在系統(tǒng)性缺陷。而作者嘗試通過同時結(jié)合三種原則而取得一個更好的策略。因此,作者最后提出了基于對三種策略因素的加權(quán)得到最后的風(fēng)險量化計算的結(jié)果。這種權(quán)重的設(shè)置提供了比較不同道德設(shè)置的機(jī)會。對于個人道德設(shè)置,權(quán)重可以從反映用戶道德直覺的實(shí)證研究中得出。將這些見解與法律和倫理學(xué)科的基本原則和規(guī)則(例如人類尊嚴(yán))相結(jié)合,可以作為一個起點(diǎn),使自動駕駛汽車更接近強(qiáng)制性道德設(shè)置(在傳統(tǒng)意義上,這意味著唯一允許和需要的行動) 。
除了對風(fēng)險計算需要的三個原則的考慮,作者還強(qiáng)調(diào)了風(fēng)險分布函數(shù)中的時間因素,這就要求對于迫在眉睫的風(fēng)險的排除(算法中常被概括為局部貪婪的策略),并且利用了“折扣因子”來對不同時間之后的風(fēng)險進(jìn)行量化,使得這種對于更緊迫的風(fēng)險的考慮可以被執(zhí)行。