













AI尋寶!女博士用YOLOv3造沉船探測(cè)器,杰克船長(zhǎng):我錯(cuò)過(guò)了100億
有沒(méi)有興趣來(lái)個(gè)水下探險(xiǎn)?
玩一次就可以財(cái)務(wù)自由的那種。
人類(lèi)航海史最早可以追溯到新石器時(shí)代。
在漫長(zhǎng)的歲月中,由于天氣、戰(zhàn)爭(zhēng)等各種原因,無(wú)數(shù)船只沉入海底。加上近代人類(lèi)在航空技術(shù)上的進(jìn)步,又有不少航空器由于各種原因葬身水下。
這些長(zhǎng)眠于海底的船只、飛機(jī)以及其他物件有些在航行過(guò)程中攜帶了大量的金銀珠寶,有些則由于其自己特殊的歷史價(jià)值令人趨之若鶩。
比如在大航海時(shí)代沉沒(méi)的這艘「阿托卡夫人」號(hào),在1985年被發(fā)現(xiàn)時(shí),船上共有超過(guò)40噸、價(jià)值超4億美元的寶藏。
發(fā)現(xiàn)它的梅爾·費(fèi)舍爾也因此走上了財(cái)務(wù)自由之路。
但顯然下海找船這件事并不是誰(shuí)都能搞定。
潛入深海需要價(jià)值不菲的專(zhuān)業(yè)設(shè)備和人員。這倒是其次,更重要的是:
你可能根本就不知道沉船在哪。
海下沉船是一筆寶貴的公共財(cái)產(chǎn),因此,國(guó)家政府機(jī)構(gòu)自然就承擔(dān)起了挖掘和保護(hù)的重任。
在美國(guó),1995年成立的海軍歷史與遺產(chǎn)司令部(NHHC)水下考古分部承擔(dān)著美國(guó)在世界各地海底長(zhǎng)眠的2,500 多艘沉船和 15,000 多架飛機(jī)殘骸的開(kāi)發(fā)和保護(hù)工作。

而這其中先找到這些水底殘骸的位置至關(guān)重要。
不久前,NHHC與美國(guó)德州大學(xué)開(kāi)展了一項(xiàng)研究,通過(guò)計(jì)算機(jī)視覺(jué)系統(tǒng)從遙感圖像中找到并確認(rèn)殘骸。
通過(guò)測(cè)試美國(guó)和波多黎各海岸的遙感圖案,準(zhǔn)確率達(dá)到了92%。
研究介紹
作者使用Python完成了所有建模,并在ArcGIS Pro中完成了地理空間分析。
用TensorFlow支持的Keras運(yùn)行深度學(xué)習(xí)模型,GPU用的是NVIDIA 1080 GEFORCE GTX。
訓(xùn)練數(shù)據(jù)集
訓(xùn)練數(shù)據(jù)包括已確認(rèn)沉船的GPS定位和相關(guān)的測(cè)深數(shù)據(jù)。
測(cè)深數(shù)據(jù)從美國(guó)國(guó)家海洋和大氣管理局 (NOAA)數(shù)據(jù)訪問(wèn)(NOAA’s Data Access Viewer)中獲取,由分辨率為1米的激光雷達(dá)和多波束聲納產(chǎn)生。
沉船GPS坐標(biāo)通過(guò)NOAA的沉船和障礙物數(shù)據(jù)庫(kù)(AWOIS)獲取。
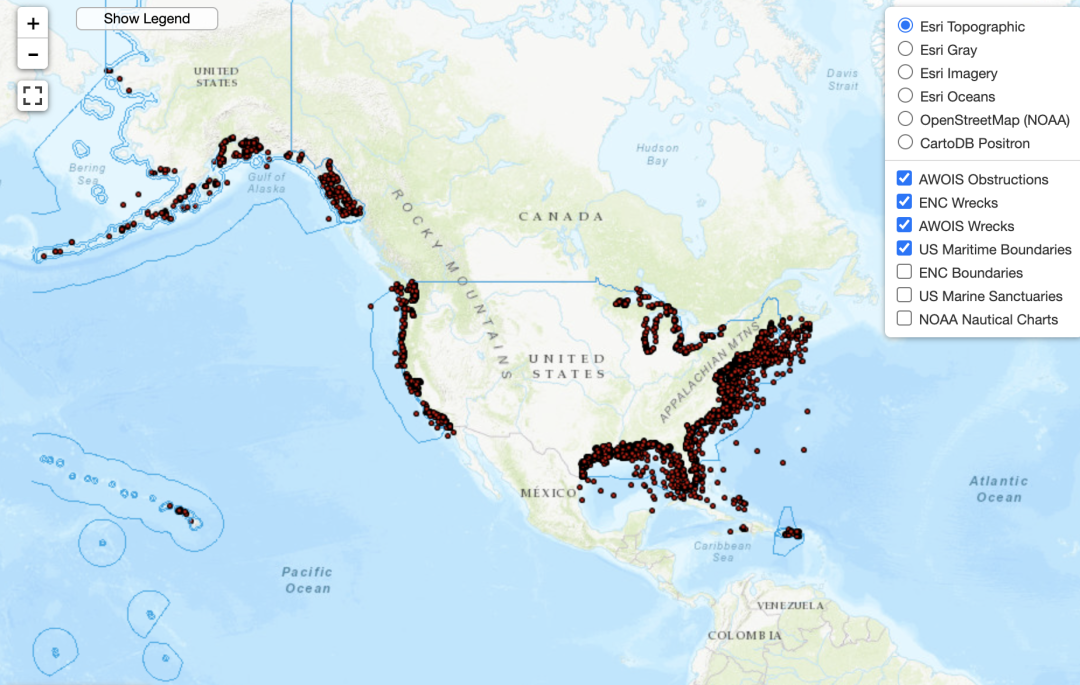
美國(guó)沉船數(shù)據(jù)庫(kù)--交互式地圖
沉船訓(xùn)練數(shù)據(jù)中包含163艘沉船,研究人員通過(guò)增強(qiáng)沉船數(shù)據(jù),得出額外247個(gè)不同的沉船圖像。
總訓(xùn)練數(shù)據(jù)集包括410艘沉船,410個(gè)區(qū)分沉船和地形的背景地形圖塊;而測(cè)試數(shù)據(jù)集則額外含有40艘沉船和40個(gè)背景地形圖塊,無(wú)數(shù)據(jù)增強(qiáng)。
以YOLOv3為架構(gòu)的模型
作者用ArcGIS Pro從高程數(shù)據(jù)(elevation data)中得出山體陰影,以png格式導(dǎo)出包含沉船的山體陰影圖塊,再用微軟的Visual Object Tagging Tool標(biāo)記。
檢測(cè)精度極高,檢測(cè)速度也飛快,所以研究人員用Joseph Redmon的卷積神經(jīng)網(wǎng)絡(luò)單次檢測(cè)器模型YOLOv3為模型架構(gòu),具體應(yīng)用是基于qqwweee的keras-yolo3和AntonMu的TrainY ourOwnYOLO這兩個(gè)GitHub存儲(chǔ)庫(kù)開(kāi)發(fā)。
YOLOv3網(wǎng)絡(luò)框架分為兩個(gè)組件:特征提取器和檢測(cè)器。

輸入到特征提取器之前,每個(gè)圖像會(huì)自動(dòng)調(diào)整為416 × 416像素。
YOLOv3使用的Darknet53能夠輸出三種不同規(guī)模的圖像到檢測(cè)器中,檢測(cè)器會(huì)輸出最合適的邊框,包括預(yù)測(cè)的邊框中心點(diǎn)、寬度和高度、置信度和類(lèi)別標(biāo)簽。
該模型使用遷移學(xué)習(xí),權(quán)重在ImageNet1000數(shù)據(jù)集上進(jìn)行了預(yù)訓(xùn)練。
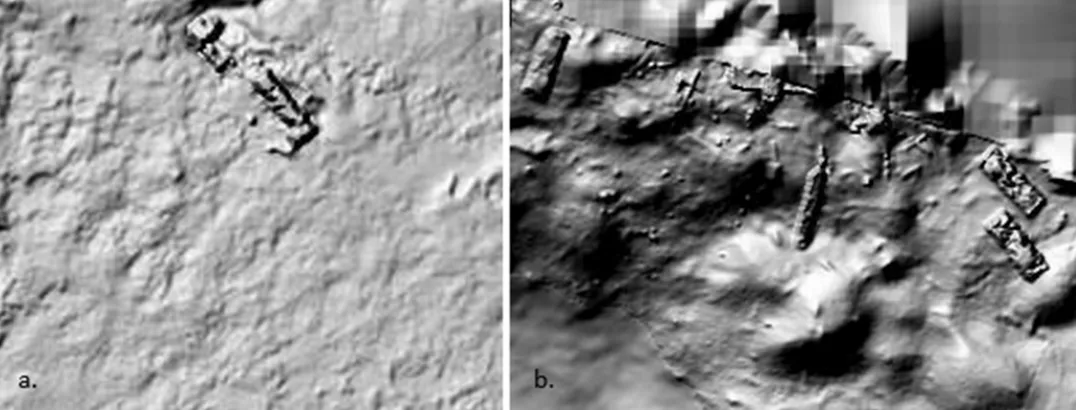
模型輸出的圖像里標(biāo)示出沉船的邊框和預(yù)測(cè)的置信度分?jǐn)?shù)。
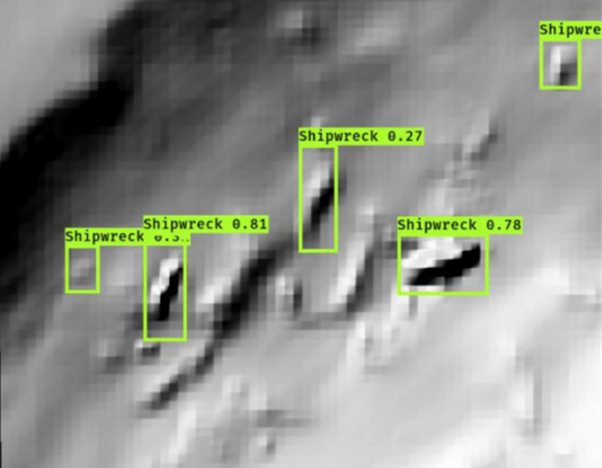
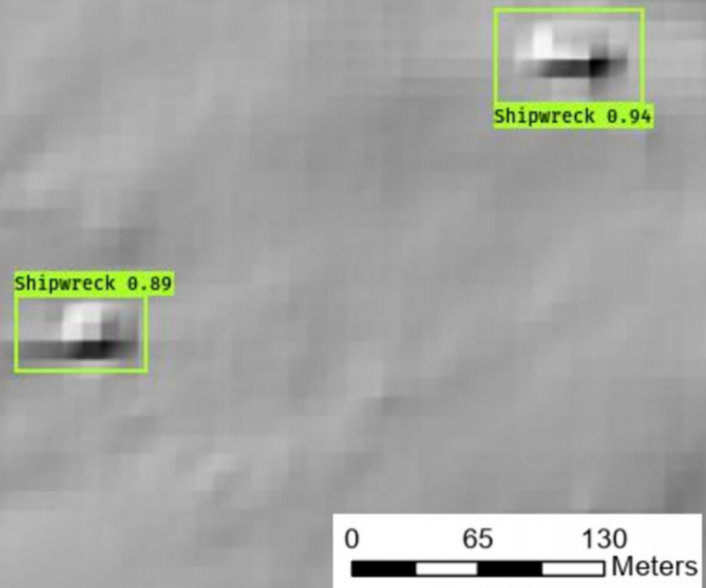
上圖為模型輸出的聲納或激光雷達(dá)山體陰影圖像,標(biāo)識(shí)的邊框?yàn)轭A(yù)測(cè)的沉船位置和預(yù)測(cè)置信度分?jǐn)?shù)。
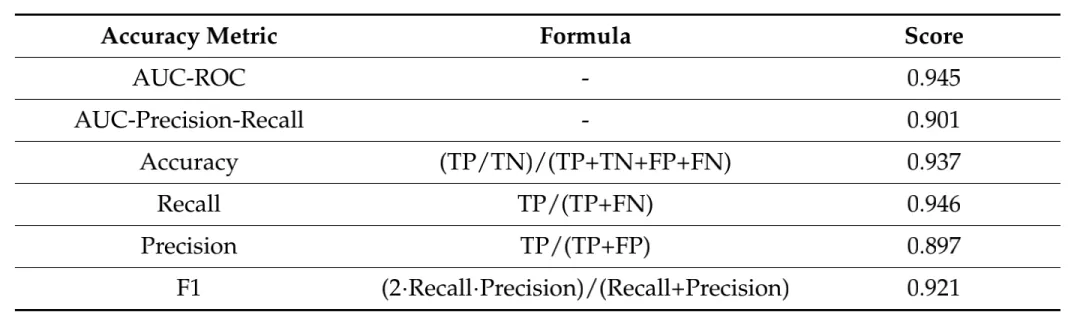
精確度指標(biāo)
模型性能的精確度指標(biāo)包括接收器操作特征曲線 (AUC-ROC)、精確率-召回率曲線(precision-recall)、總體準(zhǔn)確率、召回率、準(zhǔn)確率和F1分?jǐn)?shù)。
一般來(lái)說(shuō),AUC-ROC分?jǐn)?shù)在0.7到0.8之間是可以接受的,0.8以上為優(yōu)秀,0.9以上為優(yōu)秀。
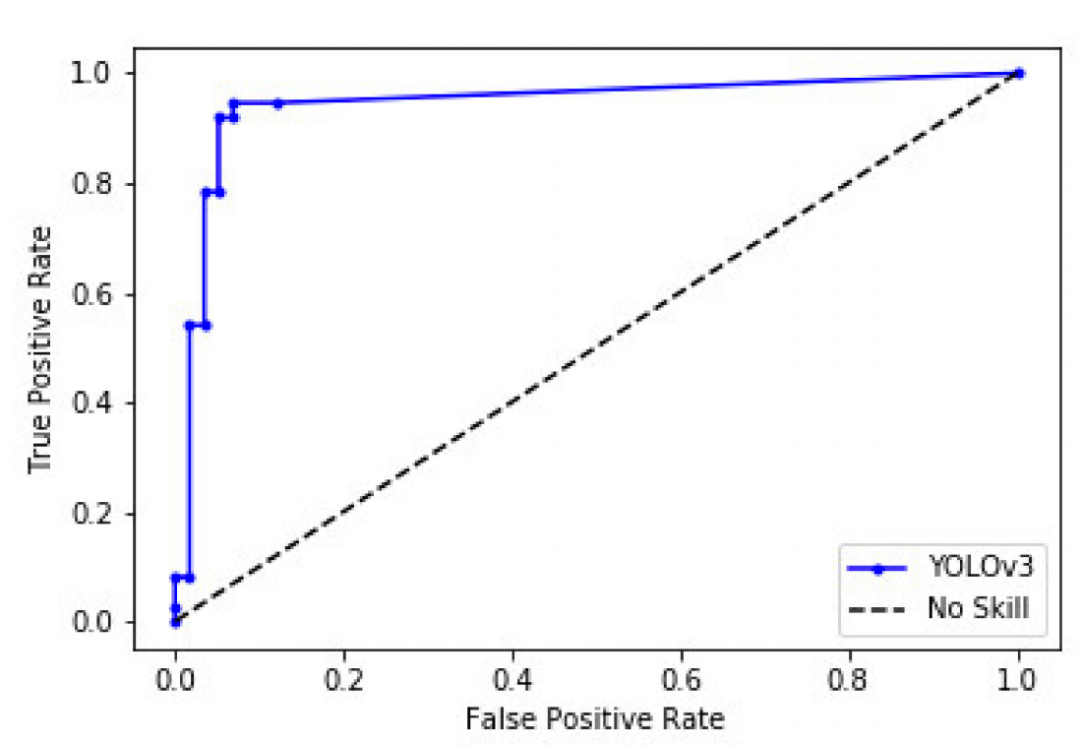
AUC-ROC曲線圖
模式與數(shù)據(jù)分析
為了尋找沉船位置和形態(tài)的模式,作者列出了箱線圖和直方圖,用單向方差來(lái)分析。
計(jì)算得出緊鄰沉船區(qū)域的參數(shù)后,與模型訓(xùn)練中使用的背景地形值進(jìn)行比較。
參數(shù)包括坡度、曲率(描述坡度的整體形狀)、曲率剖面(平行于最大坡度方向)、曲率平面(垂直于最大坡度方向)、殘骸面積、殘骸到岸距離、沉船深度等。
研究結(jié)果
模型的AUC-ROC得分為0.945,其它各項(xiàng)指標(biāo)得分如下圖。
模型的AUC精確率-召回率得分為 0.901。
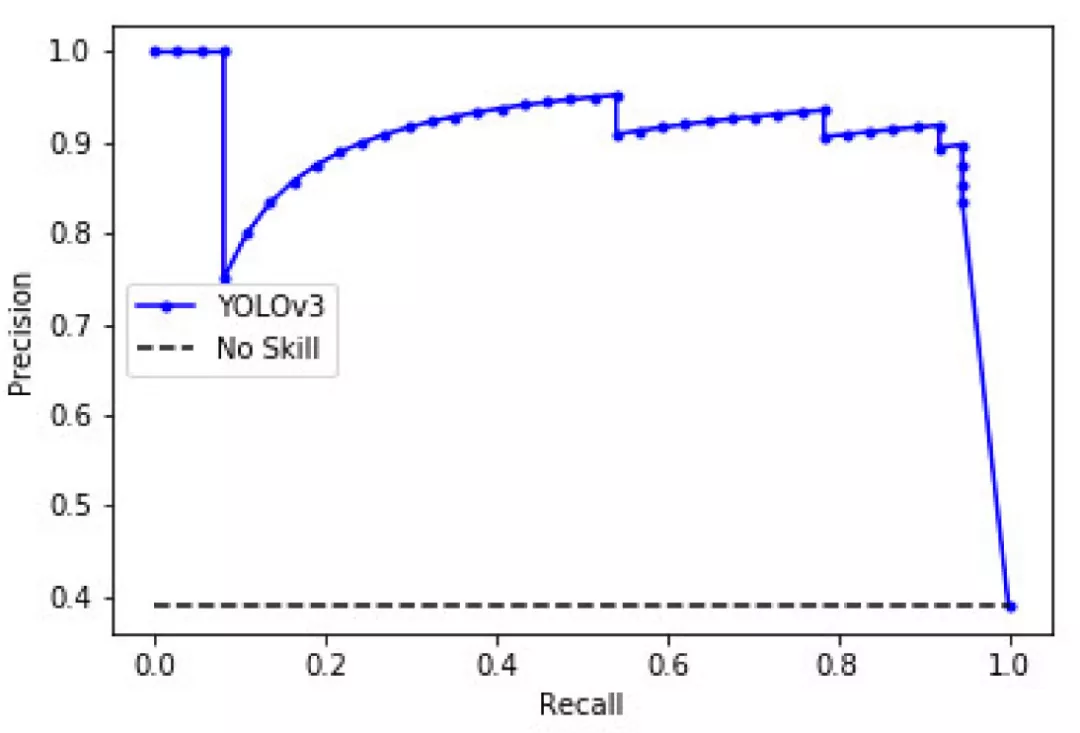
AUC精確率-召回率得分
和數(shù)據(jù)集中的背景地形圖相比,沉船明顯具有更高的斜率值和曲率值。
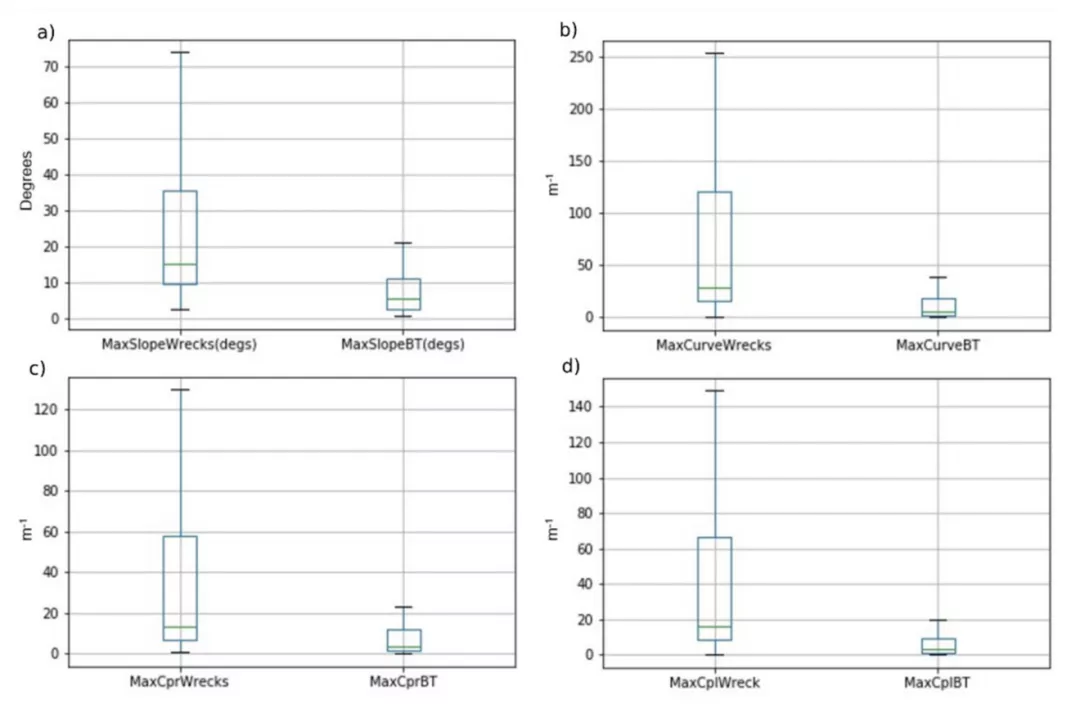
與背景地形比較沉船的 (a) 最大斜率、(b) 曲率、(c) 曲率剖面和 (d) 曲率平面的箱線圖。
F比率和p值表示,與背景地形相比,這些參數(shù)中的每一個(gè)都傾向于共享不同的沉船值范圍。
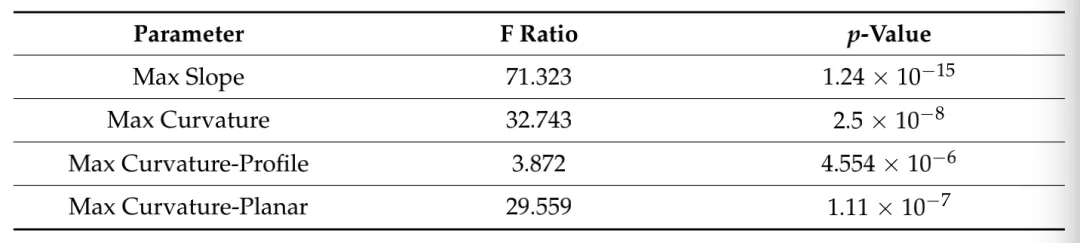
所有沉船與背景地形參數(shù)的F比率和p值(alpha= 0.05)
作者假設(shè)沉船到殘骸可見(jiàn)度可能與沉船的保存狀態(tài)相關(guān),在海水中分解得越多的沉船看起來(lái)越不呈矩形。
但這個(gè)假設(shè)需要實(shí)地驗(yàn)證,因?yàn)楹芏嘁蛩赜绊懗链臓顟B(tài),包括沉船時(shí)間、氧氣情況和湍流等環(huán)境條件。
作者還假設(shè)沉船能見(jiàn)度可能會(huì)受到海水透明度的影響。
為了驗(yàn)證這一假設(shè),作者創(chuàng)建了一個(gè)水清晰度等級(jí),并使用以ArcGIS為底圖的光譜衛(wèi)星圖像,對(duì)每個(gè)沉船位置的水清晰度進(jìn)行評(píng)估。
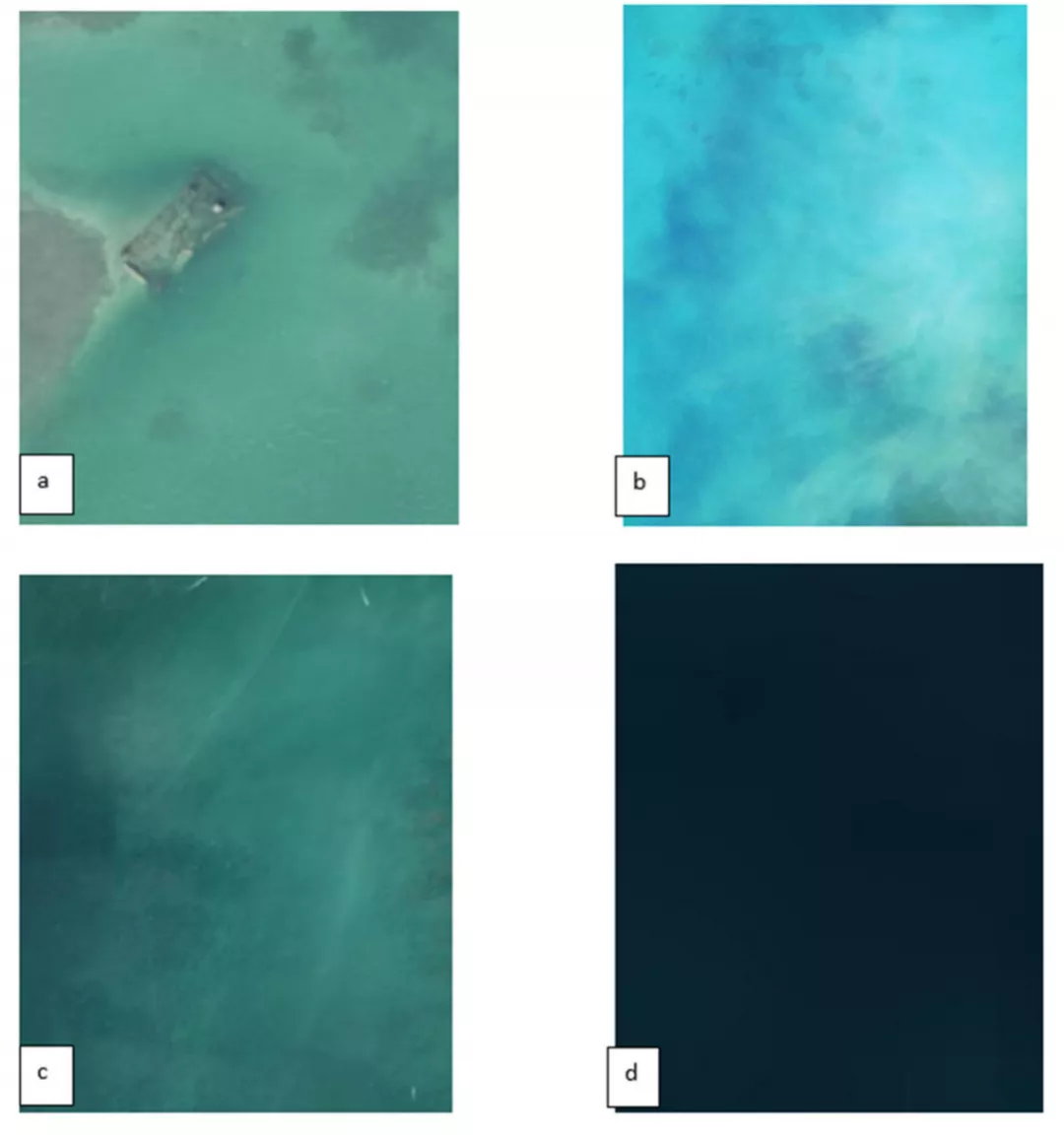
但由于90%以上的沉船都位于不透明的水域中,這一假設(shè)并不成立。
研究總結(jié)(太長(zhǎng)不看版):
1. 分辨率為3米的激光雷達(dá)和多波束聲納偶爾也能檢測(cè)出殘骸,但分辨率為1米的效果更理想。
2. 僅有不到10艘沉船能夠輕易識(shí)別出來(lái),大部分沉船僅表現(xiàn)為地形異常。
3. 沉船檢測(cè)除了受到測(cè)深數(shù)據(jù)的空間分辨率外,還受到水深和海水清晰度的影響。
清晰的沉船殘骸
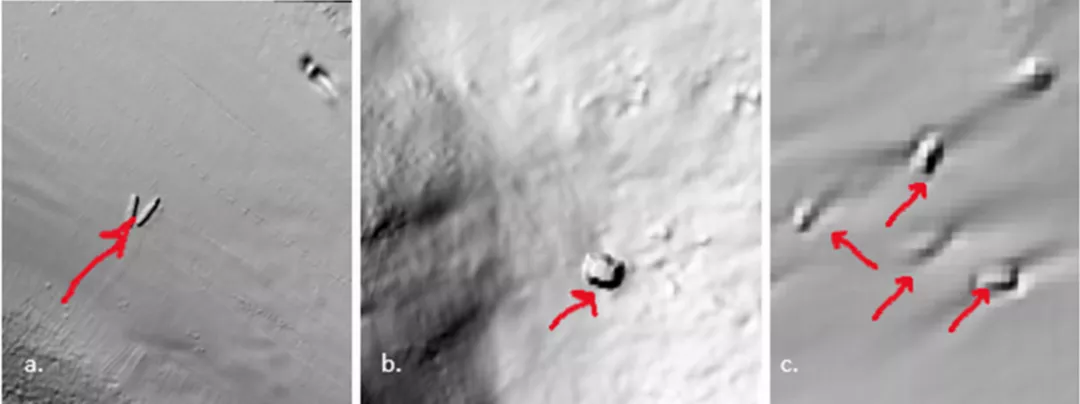
箭頭所示為不太清晰的沉船殘骸
結(jié)論
作者通過(guò)研究驗(yàn)證了將AI用于水下考古的可能性——提出的深度學(xué)習(xí)的模型檢測(cè)出水底沉船精度為0.92,能夠有效檢測(cè)出沉船殘骸。
未來(lái)通過(guò)更大、更多樣的訓(xùn)練數(shù)據(jù)集,可以進(jìn)一步提高模型性能和泛化能力,從而開(kāi)辟了新的海洋探索方法。
不僅如此,這套訓(xùn)練好的系統(tǒng)已經(jīng)可以從新的數(shù)據(jù)中來(lái)預(yù)測(cè)沉船或者飛機(jī)的方位,并且還能夠適配于其他格式的數(shù)據(jù),比如多光譜圖像。
總之,有了AI,科研部門(mén)可以更快、更準(zhǔn)地發(fā)現(xiàn)海底沉船了。
作者簡(jiǎn)介
論文一作Leila Character是德州大學(xué)奧斯汀分校的在讀博士。她專(zhuān)注于使用機(jī)器學(xué)習(xí)和遙感圖像來(lái)識(shí)別考古和自然特征。
她可謂是一個(gè)跨界研究學(xué)者,將AI應(yīng)用于跨度非常大的專(zhuān)業(yè)中,尤其是考古學(xué)在學(xué)術(shù)界堪稱(chēng)是一片「藍(lán)海」。
這項(xiàng)研究的模型還能夠在預(yù)測(cè)世界不同地區(qū)陸地和水下不同類(lèi)型的考古特征之間快速、輕松地切換。
為此,她還將通過(guò)這項(xiàng)研究來(lái)尋找古瑪雅考古建筑、瑪雅考古遺址的洞穴和羅馬尼亞墓葬的項(xiàng)目。



















