













淺談無人機偵測反制技術(shù)
01引言
無人機發(fā)展起步于軍事領(lǐng)域,上世紀90年代以后,在軍事應(yīng)用上取得了突飛猛進的發(fā)展。進入本世紀以來,隨著技術(shù)的不斷成熟與進步,無人機開始向小型化、低空化、簡單化、低技術(shù)化、低成本化方向發(fā)展,憑借站得高、看得遠,飛得快、行進無障礙,適應(yīng)能力強、改裝方便等優(yōu)勢,迅速在民用領(lǐng)域獲得青睞。
但是,迅速普及的無人機熱潮使得違規(guī)飛行的猖獗現(xiàn)象,嚴重干擾了國家空防警戒系統(tǒng)正常秩序,造成國家人力、物力和財力的重大浪費,也對國家重點要害部位防護、首都日常防空、軍民航飛行安全和社會安全穩(wěn)定帶來前所未有的挑戰(zhàn)。因此研制無人機偵測及反制裝備,制定合理的規(guī)范實現(xiàn)有效監(jiān)管,實現(xiàn)非法無人機的捕獲,讓無人機有序發(fā)展成為目前亟待解決的難題。
02無人機偵測技術(shù)
無人機偵測技術(shù)主要通過聲音識別、光電識別、雷達探測以及電磁波探測實現(xiàn)。有效的偵測可以實現(xiàn)無人機的定位,從而實現(xiàn)無人機的反制及管控。
2.1 聲音識別
無人機在飛行時,其電機工作和旋翼震動均會產(chǎn)生一定程度的噪聲,該噪聲主要分布在0.3k~20kHz的范圍內(nèi)。無人機聲音識別是通過識別該噪聲來發(fā)現(xiàn)和偵測無人機,主要有“音頻指紋”和聲波陣列接收兩種方式。
“音頻指紋”識別無人機:每個無人機都有一個獨一無二的“音頻指紋”——螺旋槳的旋轉(zhuǎn)聲。通過麥克風探測上空可疑區(qū)域,記錄下幾處地點的音頻噪聲,將探測到的音頻與記錄了所有無人機音頻的數(shù)據(jù)庫進行匹配,便可以辨識出是否為無人機的聲響。“音頻指紋”識別不僅能夠檢測無人機來自何處,而且能檢測出無人機的類型。“音頻指紋”識別技術(shù)需要在數(shù)據(jù)庫囊括所有無人機的聲響,包括一些軍用和自制無人機的聲響,才能降低誤報率。該方法可偵測的有效距離一般在200米以內(nèi),只有個別產(chǎn)品識別距離可達到1千米。
聲波陣列接收識別無人機:采用聲陣列接收空中飛行的無人機發(fā)出的聲信號并進行處理,可以實現(xiàn)目標的分類識別。無人機的聲音信號具有如下的特征:時域上為連續(xù)信號,頻域上為一系列逐漸衰減的線譜;該線譜的基波分量與無人機的轉(zhuǎn)速成正比關(guān)系。采用基于高靈敏度聲——電信號轉(zhuǎn)換探頭、多通道高速采集處理卡,應(yīng)用多點相關(guān)運算和數(shù)據(jù)融合處理等技術(shù),可以建立一套基于聲學原理的,采用多孔徑協(xié)同運算技術(shù)的聲音探測系統(tǒng),實現(xiàn)對無人機目標聲音信號的快速發(fā)現(xiàn)。該方法可靠發(fā)現(xiàn)及跟蹤距離約在200米左右。
2.2 可見光/紅外探測
可見光/紅外探測是利用可見光或目標的熱紅外反射進行無人機探測,采用超視距、高變倍、高清、透霧的可見光攝像機和紅外熱成像儀傳感器組合,融合先進的DOE光學紅外熱像點目標跟蹤探測技術(shù)、高清激光掃描面目標圖像識別算法技術(shù)、萬次微脈沖高精度伺服驅(qū)動光電轉(zhuǎn)臺技術(shù),使其可在常規(guī)模式下監(jiān)控的同時對低空、低速飛行的小型無人機進行探測、分類和跟蹤,對需要進行監(jiān)控的區(qū)域進行全天候、全空間的視頻探測與監(jiān)視。對微型無人機的作用距離可達2千米。
可見光/紅外探測可捕獲各種型號的無人機,能夠?qū)崿F(xiàn)全天候、實時化、可視化的監(jiān)控管理。無人機由于體積小,其紅外輻射特征低,使得通過紅外探測的發(fā)現(xiàn)距離大大縮短,在抗激光探測上,無人機更易采取如吸波、透射、導光等材料,減少激光反射及外形隱身設(shè)計等,使得可見光/紅外探測更加困難。
2.3 雷達探測
雷達探測是應(yīng)用現(xiàn)有2D/3D機械或電掃描雷達技術(shù),利用電磁波在經(jīng)過不同傳輸介質(zhì)時產(chǎn)生反射波現(xiàn)象來實現(xiàn)對無人機目標的偵測。為與無人機的RCS面積相匹配,通常采用S、X、Ku波段的雷達,需要配合光學或其他系統(tǒng)實現(xiàn)對無人機目標的飛行監(jiān)測。雷達探測受到低空仰角限制的影響,需要有較強的地面雜波抑制能力。針對一些低空目標多采用結(jié)構(gòu)簡單、部署方便、利用率高的氣球載雷達探測。
雷達發(fā)現(xiàn)不受無人機類型的影響,有效探測距離可達到數(shù)千米。但現(xiàn)代無人機一般都是由塑料泡沫、輕木及復合材質(zhì)構(gòu)成,這此材料具有透波特性,使其具有低可探測性。另外,無人機自身的雷達散射面積非常小,加之飛行速度慢,造成的多普勒效應(yīng)不明顯,降低了被雷達探測的距離和發(fā)現(xiàn)概率,存在低空探測盲區(qū)大,回波小且弱,容易與氣象干擾、雜波干擾相混淆。無人機在實際飛行中離地面只有幾十到幾百米,地面雷達很難對其實施遠距離探測和跟蹤。
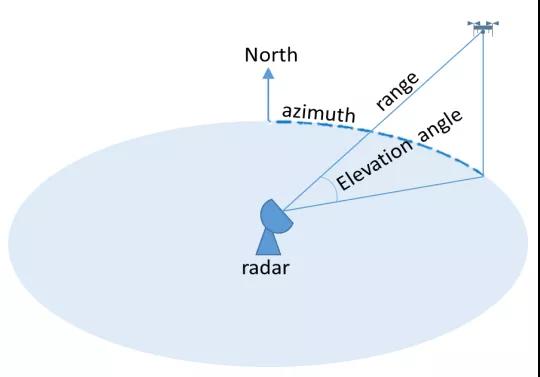
圖1 雷達探測
2.4 無線電磁頻譜監(jiān)測
無人機與地面遙控者通過遙控系統(tǒng)和圖像傳輸系統(tǒng)進行通信,遙控負責把操作者的指令傳達給無人機,圖像把相機的取景畫面、飛行數(shù)據(jù)等信息傳到操作者的屏幕上。兩個系統(tǒng)都是采用不同頻率的無線電進行傳送。無人機遙控通常采用2.4G頻率的信號進行操作指令傳輸,無人機利用衛(wèi)星導航飛行時,數(shù)傳模塊會將飛行相關(guān)信息(如位置、自身狀態(tài)、電量信息等)回傳至地面控制端,以確保飛行安全。因此,利用無線電監(jiān)測設(shè)備,發(fā)現(xiàn)無人機的數(shù)傳和圖傳鏈路信號,從而實現(xiàn)對無人機目標發(fā)現(xiàn)。
通過無線電磁頻譜監(jiān)測的方式適用于各種類型的無人機,可安裝在任何需要控制的區(qū)域,允許7×24小時的無間隔監(jiān)控和記錄。另外,可以捕捉隱藏在建筑物、工廠和樹木間的無人機信號,有效偵測到無人機操作者。現(xiàn)有典型監(jiān)測系統(tǒng)具備對無人機的有效監(jiān)測發(fā)現(xiàn)能力:2.4GHz的控制信號,偵測范圍約1-2km;433/ 868/920MHz的數(shù)傳信號,有效偵測范圍約2-3km;5.8GHz的圖傳信號,偵測范圍約1km。但如果無人機目標不發(fā)射無線電信號處于“靜默”狀態(tài),將無法使用電磁頻譜方法進行有效發(fā)現(xiàn)。

圖2 無線電磁頻譜監(jiān)測
03無人機反制技術(shù)
傳統(tǒng)的航空器在飛行過程中,為了滿足對運載體的飛行狀態(tài)進行測量的需要,其內(nèi)部裝有自由度陀螺儀以及加速度計等傳感器,稱之為慣性導航的自主式導航系統(tǒng)。自由度陀螺儀用來測量運載體的轉(zhuǎn)動運動狀態(tài),其內(nèi)置的加速度計用來測量運載體的平移運動狀態(tài)。利用安裝在運載體中的慣性原件(如加速度計)來測量運載體本身的加速度,經(jīng)過積分和運算得到速度和位置,從而達到對運載體導航定位。計算機根據(jù)測得的加速度信號計算出運載體的速度和位置數(shù)據(jù)。在此基礎(chǔ)上,當前的無人機利用卡爾曼濾波技術(shù),結(jié)合諸如GPS、北斗以及GLONASS等衛(wèi)星導航系統(tǒng),可獲得較慣性導航精度更高的飛行狀態(tài)反饋信息,地面上控制者籍此獲取無人機的飛行狀態(tài)。
針對上述無人機的工作特點可知,為了阻斷無人機的飛行,可以采用針對性的管制與阻斷措施:
(1)針對遙控飛行時下,對無人機的控制鏈路進行阻斷與管控,以破壞地面控制者遙控無人機入侵受保護或受限制飛行區(qū)域的企圖;
(2)針對無人機巡航飛行時的GPS、北斗以及GLONASS等衛(wèi)星導航系統(tǒng)的阻斷與管控,以阻止無人機獲取自身當前位置狀態(tài),進而破壞無人機巡航狀態(tài)。
在發(fā)現(xiàn)無人機后,為了有效的控制無人機終止既定飛行,考慮采用無線電信號壓制手段,對其進行攔截。對其信號壓制主要從以下兩個方面著手研究:
第一、壓制數(shù)據(jù)鏈路控制信號。在無人機通過地面端遙控飛行的模式下,地面控制端主要通過數(shù)據(jù)鏈路向無人機發(fā)送遙控指令,從而完成相應(yīng)的飛行動作。因此,在該情況下,通過現(xiàn)有壓制手段,對其控制數(shù)據(jù)鏈路信號進行大功率阻塞干擾壓制,可使無人機失去與地面控制端聯(lián)系,從而使其不能正常飛行。本次試驗中主要針對前述中針對433MHz頻段、900MHz頻段、2.4GHz頻段三個常用頻段展開信號壓制試驗。
第二、壓制衛(wèi)星導航信號。無人機導航系統(tǒng)向無人機提供參考坐標系的位置、速度、飛行姿態(tài),引導無人機按照指定航線飛行。無人機如失去導航信號將產(chǎn)生漂移、無法平穩(wěn)飛行甚至墜毀的現(xiàn)象。因此,考慮利用無線電管制設(shè)備,對無人機衛(wèi)星導航系統(tǒng)進行大功率信號壓制干擾,使其無法正常工作,從而使飛行中的無人機失去正常飛行的狀態(tài)。
3.1 無人機遙控信號管控
控制其鏈路信號,可以采用欺騙式方法,例如,禁飛區(qū)欺騙阻斷鏈路信號,發(fā)射禁飛區(qū)經(jīng)緯度的偽GPS信號,促使無人機原地降落;或向無人機發(fā)射航線方向上極端坐標的GPS,將無人機沿反方向驅(qū)離。
遙控信號的強度遠大于GPS信號,但由于遙控接收天線的主瓣方向必須朝向地面,所以不能像GPS天線那樣對地面干擾提供隔離。目前,遙控發(fā)射機已經(jīng)普遍采用跳頻、擴頻技術(shù),而且跳頻參數(shù)還可以自適應(yīng),具有一定的抗干擾能力。在計算需要的干擾大小時,必須已知跳頻、擴頻的參數(shù)才能得到準確的結(jié)果。可選用的干擾手段包括暴力噪聲干擾、阻塞干擾和瞄準干擾等。
3.1.1 暴力噪聲干擾
遙控發(fā)射機仍按上述參數(shù),假設(shè)管控系統(tǒng)位置距離無人機為100米,天線增益為3dB,如果采用相關(guān)的干擾,需要的干擾功率與遙控發(fā)射功率接近,即0.1W以上。如果遙控信號存在跳頻措施,而干擾者除了頻帶范圍之外,并不知道這些措施的任何參數(shù),只能用噪聲進行全頻帶暴力覆蓋,那么所需功率將有所提高。通常來說,至少需要提升30dB(亦即100W)。這無疑提高了壓制設(shè)備的實現(xiàn)成本;同時,壓制設(shè)備功率過大亦可能會影響其它正常的無線電通信。
如果遙控信號的跳頻范圍是2405~2495MHz,而管控系統(tǒng)位置不知道跳頻參數(shù),那么就只好用噪聲進行全頻帶覆蓋,而遙控信號功率集中,當它的總功率電平比干擾的總功率電平小的時候,依然可能在局部比干擾電平高不少,從而不受干擾影響。目前先進的遙控器已經(jīng)能夠根據(jù)干擾的情況自動調(diào)整跳頻頻率,所以對于采用跳頻的遙控器,窄帶強干擾效果不佳。
3.1.2 阻塞干擾
阻塞干擾,是指位于通信信道之外的,超過接收機電路的承受能力,能夠?qū)е陆邮諜C對正常信號的處理能力降低的干擾。
采用擴頻、跳頻技術(shù)有利于對抗噪聲干擾,但并不能提高接收機的阻塞電平。相反,由于必須具備較寬的前級,更容易發(fā)生阻塞。這里,阻塞電平的定義是:位于接收機瞬時通帶之外的,使接收靈敏度壓縮6dB所需要的干擾電平。
民用接收機為了提高靈敏度,通常天線信號經(jīng)簡單的濾波以后就進入低噪放和混頻器。從省電考慮,這些電路不能采用大功率器件,他們的動態(tài)范圍是比較小的,通常只需提供-20dBm左右的干擾信號,即使干擾頻率與接收頻率有一個小的偏差,也能使接收靈敏度降低6dB。這時,-20dBm就是該接收機的阻塞電平。如果干擾進一步增強,接收機將完全收不到有用信號。如果接收機前級沒有適當?shù)南薹娐罚鼜姷母蓴_能將其燒毀。
3.1.3 瞄準干擾
瞄準干擾是根據(jù)被干擾信號的瞬時頻率和開機時間施放的針對性干擾。窄帶數(shù)傳或跳頻信號在任意瞬間的頻率是確定的,干擾只需要針對這些頻率,而不需要覆蓋所有可能跳到的范圍。這將大大節(jié)省干擾功率。對于單純的直接序列擴頻,通常不定義瞄準干擾。偵察接收機持續(xù)的監(jiān)聽可能的通信頻段,將數(shù)據(jù)送給計算機。當計算機發(fā)現(xiàn)遙控器的信號以后,立即把需要施放干擾的參數(shù)告訴干擾發(fā)射機,使干擾發(fā)射機開始發(fā)射。當經(jīng)過一段時間(例如1毫秒),讓干擾暫停,偵察接收機繼續(xù)搜尋遙控信號,如果遙控信號繼續(xù)存在或變更頻率,則把新的參數(shù)告訴發(fā)射機,再次啟動干擾。如果遙控信號消失,則停止干擾。讓接收機與發(fā)射機分開布置,可以偵察和干擾同時進行。
這種干擾的好處是沒有信號則不放干擾,而且干擾電平很小,環(huán)境友好程度高。如果遙控信號未經(jīng)擴頻,通常使接收電平等大或略大一點即可。如果是擴頻信號,由于擴頻增益不高,通常也只需要大20dB以內(nèi)。功率的設(shè)定可根據(jù)遙控信號的瞬時帶寬而定,帶寬大的時候適當提高一些。不論頻率、帶寬都可以被偵察接收機測定,如果技術(shù)允許,還可以測定調(diào)制方式,并對某些信號(比如管控系統(tǒng)位置附近的WIFI信號)鈍感。
3.2 無人機導航信號管控
無人機在飛行時,會利用衛(wèi)星導航信號確定自身位置,從而實現(xiàn)自身狀態(tài)穩(wěn)定、調(diào)整飛行方向、回傳位置狀態(tài)等功能。目前,較為新型的無人機導航模塊已經(jīng)可以實現(xiàn)美國GPS衛(wèi)星導航系統(tǒng)、俄羅斯GLONASS衛(wèi)星導航系統(tǒng)以及中國的北斗衛(wèi)星導航系統(tǒng)的兼容,同時利用三種導航系統(tǒng)進行定位;年代較早的無人機至少會采用GPS衛(wèi)星導航系統(tǒng)進行定位。由于GPS的適用性和使用率最高,以下即以GPS為例對無人機導航信號管控的所需的電平水平進行數(shù)學推算。
GPS信號十分微弱,在地面附近已低于自然本底噪聲。采用常用的3-6dB增益的無源天線在開闊地接收,其總接收電平最高可達約-120dBm。民用GPS信號是頻率1575MHz,2.046MHz帶寬的擴頻信號,擴頻增益43dB,按6dB考慮。通常,無論采用何種干擾手段,只要電平足夠大都能產(chǎn)生一定的干擾效果,但由于擴頻增益太高,部分頻帶干擾的效益很差。在容易實現(xiàn)的方式中,全頻帶噪音干擾較有優(yōu)勢,滿足如下條件時誤碼率高于10%:
(1)干擾信號的帶寬等于或大于2.046MHz,覆蓋GPS信號的整個頻帶。
(2)干擾信號經(jīng)GPS天線接收后,其總功率電平要高于-83dBm。
從管控角度考慮,無人機目標使用自動預設(shè)路線模式飛行時,如能阻斷其接收衛(wèi)星導航信號,則將無法按預訂路線飛行;采用遙控模式飛行時,根據(jù)實驗結(jié)果,阻斷其衛(wèi)星導航信號可以使其喪失維持自身穩(wěn)定的能力,一旦遇到空中氣流影響則很難進行穩(wěn)定飛行。因此,對衛(wèi)星導航信號實施管控的適應(yīng)性和可實現(xiàn)性更強,考慮到較為新型的無人機導航模塊已經(jīng)可以實現(xiàn)GPS、GLONASS及北斗系統(tǒng)的兼容,同時利用三種導航系統(tǒng)進行定位,因此對衛(wèi)星導航信號的管控也應(yīng)同時考慮這三種模式。
3.3 對下行圖傳和遙測信號的干擾
這部分干擾與對遙控信號的干擾沒有本質(zhì)的區(qū)別,不同之處是攻防態(tài)勢更加不利于管控系統(tǒng)位置。由于干擾的對象是操縱者的接收機,一般而言管控系統(tǒng)位置與操縱者的距離大于或接近于無人機與操縱者的距離。另外,無人機至少有幾十米到數(shù)百米高度,信號傳播條件比位于地面的管控系統(tǒng)位置要好得多,操縱者還可以使用定向天線瞄準無人機,甚至使用可自動調(diào)零的天線對干擾信號產(chǎn)生隔離。
04非法無人機捕獲
通過借助能夠飛翔的鳥類、機載懸掛的捕獲網(wǎng),可以實現(xiàn)非法無人機的捕獲。
4.1 老鷹捕獲
荷蘭警方正在與一家名為Guard from Above的公司進行合作,讓老鷹來捕捉違規(guī)無人機。這是一家來自和荷蘭的猛獸訓練機構(gòu)。荷蘭警方想要對老鷹這種猛禽進行特殊的訓練,并且其靈活的身手和極快的飛行速度來對付無人機。老鷹的本能是捕捉天空中飛行的鳥類,這也會讓其在空中捕捉無人機,然后將其帶到遠離人群的安全區(qū)域。據(jù)悉,這項測試將會持續(xù)幾個月的時間,經(jīng)過多次老鷹捕獲無人機實驗后,荷蘭警方訓練了一批老鷹用以捕獲無人機。
4.2 無人機捕獲
美國密歇根大學較早地進行了使用機載懸掛捕獲網(wǎng)的無人機來捕獲無人機的實驗。日本政府受此啟發(fā),專門成立了“反無人機小分隊”。這個小分隊的工作,就是對付東京上空那些違規(guī)飛行的無人機。但是這個小分隊的目標并不是將這些無人機擊落,而是要“抓活的”。他們給警方的無人機配備了一個簡單的捕捉網(wǎng),在空中將違規(guī)無人機捕獲,然后安全返回地面。2016年4月,日本警方使用無人機型號為DJI Spreading Wings 900,他們在下面添加了一個捕捉網(wǎng),來捕獲民用無人機。據(jù)稱,東京警方計劃在2017年2月之前,投入使用10架這樣的無人機,來保證重要政府建筑周邊上空的安全。
05結(jié)論
本文通過無人機偵測技術(shù)和無人機反制技術(shù)兩個方面介紹了無人機探測和反制的原理和方法,同時介紹了非法無人機捕獲的方法,通過對這些偵測、反制裝備技術(shù)的研究開發(fā),可以提高公共場所及涉密場所對無人機入侵的防御能力,保護人民財產(chǎn)安全。

















