STM32串口開發之環形緩沖區
01簡介
在之前的文章《stm32 串口詳解》中,我們講解了串口的基本應用,使用串口中斷接收數據,串口中斷發送回包(一般可以使用非中斷形式發送回包,在數據接收不頻繁的應用中。串口接收中斷保證串口數據及時響應,使用非中斷方式發送回包即可)。
后面的文章《STM32使用DMA接收串口數據》和《STM32使用DMA發送串口數據》講解了如何使用DMA輔助串口收發數據,使用DMA的好處在于不用CPU即可完成串口收發數據,減輕CPU負擔,在串口通信頻繁且不想頻繁中斷的應用中非常有用。
除了上述兩種場景,還有一種應用場景:串口接收數據長度位置,頻率未知,不要求實時處理的場景。如果采用上述方案,接收一幀數據立即處理,那么在處理的時候來的數據包就“丟失”了。這個時候就需要緩沖隊列來解決這個問題。
02緩沖區
緩沖區看名字就知道,是緩沖數據用的。實現緩沖區最簡單的辦法時,定義多個數組,接收一包數據到數組A,就把接收數據的地址換成數組B,每個數據有個標記字節用于表示這個數組是否收到數據,收到數據是否處理完成。
上述方案是完全可行的,但有缺點:
①緩沖數據組數一定,且有多變量,代碼結構不太清晰。
②接收數據長度可能大于數組大小,也可能小于數組大小。不靈活,需要接收數據很長時容易出錯,且內存利用率低。
解決這個問題的好辦法是:環形緩沖區。
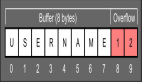
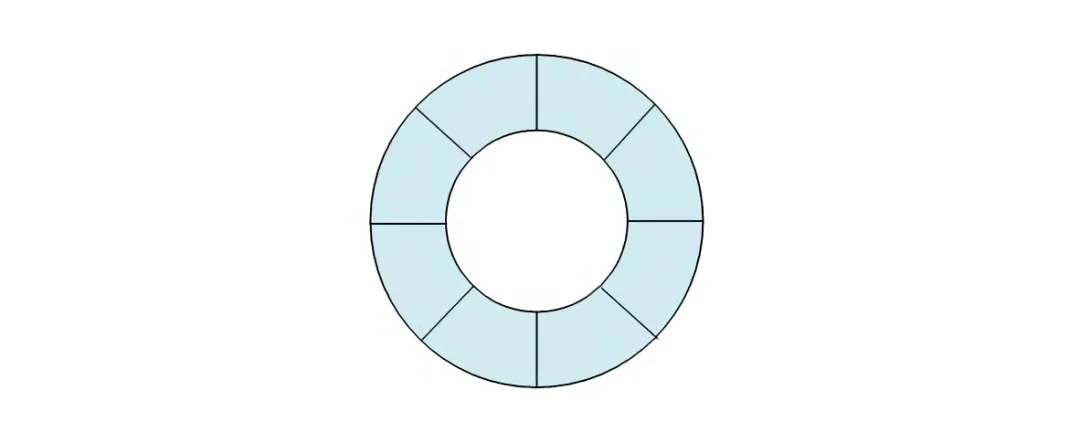
環形緩沖區就是一個帶“頭指針”和“尾指針”的數組。“頭指針”指向環形緩沖區中可讀的數據,“尾指針”指向環形緩沖區中可寫的緩沖空間。通過移動“頭指針”和“尾指針”就可以實現緩沖區的數據讀取和寫入。在通常情況下,應用程序讀取環形緩沖區的數據僅僅會影響“頭指針”,而串口接收數據僅僅會影響“尾指針”。當串口接收到新的數組,則將數組保存到環形緩沖區中,同時將“尾指針”加1,以保存下一個數據;應用程序在讀取數據時,“頭指針”加1,以讀取下一個數據。當“尾指針”超過數組大小,則“尾指針”重新指向數組的首元素,從而形成“環形緩沖區”!,有效數據區域在“頭指針”和“尾指針”之間。如下圖
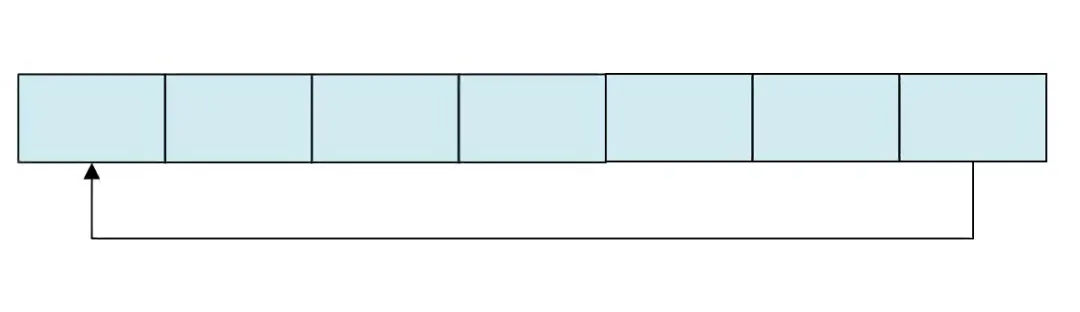
如上面說的,環形緩沖區其實就是一個數組,將其“剪開”,然后“拉直”后如下圖
環形緩沖區的特性
1、先進新出。
2、當緩沖區被使用完,且又有新的數據需要存儲時,丟掉歷史最久的數據,保存最新數據。
03代碼實現
環形緩沖區的實現很簡單,只需要簡單的幾個接口即可。
首先需要創建一個環形緩沖區
- #define RINGBUFF_LEN (500) //定義最大接收字節數 500
- #define RINGBUFF_OK 1
- #define RINGBUFF_ERR 0
- typedef struct
- {
- uint16_t Head;
- uint16_t Tail;
- uint16_t Lenght;
- uint8_t Ring_data[RINGBUFF_LEN];
- }RingBuff_t;
- RingBuff_t ringBuff;//創建一個ringBuff的緩沖區
當我們發現環形緩沖區被“沖爆”時,也就是緩沖區滿了,但是還有待緩沖的數據時,只需要修改RINGBUFF_LEN的宏定義,增大緩沖區間即可。
環形緩沖區的初始化
- /**
- * @brief RingBuff_Init
- * @param void
- * @return void
- * @note 初始化環形緩沖區
- */
- void RingBuff_Init(void)
- {
- //初始化相關信息
- ringBuff.Head = 0;
- ringBuff.Tail = 0;
- ringBuff.Lenght = 0;
- }
主要是將環形緩沖區的頭,尾和長度清零,表示沒有任何數據存入。
環形緩沖區的寫入
- /**
- * @brief Write_RingBuff
- * @param uint8_t data
- * @return FLASE:環形緩沖區已滿,寫入失敗;TRUE:寫入成功
- * @note 往環形緩沖區寫入uint8_t類型的數據
- */
- uint8_t Write_RingBuff(uint8_t data)
- {
- if(ringBuff.Lenght >= RINGBUFF_LEN) //判斷緩沖區是否已滿
- {
- return RINGBUFF_ERR;
- }
- ringBuff.Ring_data[ringBuff.Tail]=data;
- ringBuff.Tail = (ringBuff.Tail+1)%RINGBUFF_LEN;//防止越界非法訪問
- ringBuff.Lenght++;
- return RINGBUFF_OK;
- }
這個接口是寫入一個字節到環形緩沖區。這里注意:大家可以根據自己的實際應用修改為一次緩沖多個字節。并且這個做了緩沖區滿時報錯且防止非法越界的處理,大家可以自行修改為緩沖區滿時覆蓋最早的數據。
環形緩沖區的讀取
- /**
- * @brief Read_RingBuff
- * @param uint8_t *rData,用于保存讀取的數據
- * @return FLASE:環形緩沖區沒有數據,讀取失敗;TRUE:讀取成功
- * @note 從環形緩沖區讀取一個u8類型的數據
- */
- uint8_t Read_RingBuff(uint8_t *rData)
- {
- if(ringBuff.Lenght == 0)//判斷非空
- {
- return RINGBUFF_ERR;
- }
- *rData = ringBuff.Ring_data[ringBuff.Head];//先進先出FIFO,從緩沖區頭出
- ringBuff.Head = (ringBuff.Head+1)%RINGBUFF_LEN;//防止越界非法訪問
- ringBuff.Lenght--;
- return RINGBUFF_OK;
- }
讀取的話也很簡單,同樣是讀取一個字節,大家可以自行修改為讀取多個字節。
04驗證
光說不練假把式,下面我們就來驗證上面的代碼可行性。
串口中斷函數中緩沖數據
- void USART1_IRQHandler(void)
- {
- if(USART_GetFlagStatus(USART1, USART_FLAG_RXNE))
- {
- Write_RingBuff(USART_ReceiveData(USART1));
- USART_ClearFlag(USART1, USART_FLAG_RXNE);
- }
- }
在主循環中,讀取緩沖區的數據,然后發送出去,因為是簡單的demo,添加了延時模擬CPU處理其他任務。
- while (1)
- {
- if(Read_RingBuff(&data)) //從環形緩沖區中讀取數據
- {
- USART_SendData(USART1, data);
- }
- SysCtlDelay(1*(SystemCoreClock/3000));
- }
驗證,間隔100ms發送數據。

結果顯示沒有出現丟包問題。如果你的應用場景串口通信速率快,數據量大或處理速度慢導致丟包,建議增大RINGBUFF_LEN的宏定義,增大緩沖區間即可。
本文轉載自微信公眾號「 知曉編程」,可以通過以下二維碼關注。轉載本文請聯系 知曉編程公眾號。