













人為「刷」論文引用量,米蘭理工教授被IEEE懲罰,獎(jiǎng)項(xiàng)被撤銷(xiāo)
近日,IEEE 官方發(fā)布的一則公告稱(chēng),米蘭理工大學(xué)教授 Hamid Reza Karimi 因?qū)ζ?2017 年發(fā)表的一篇論文利用不正當(dāng)手段增加引用量,這種行為違反了 IEEE 道德出版原則。
公告地址:
https://ieeexplore.ieee.org/document/7792142/authors#authors
根據(jù)杜克大學(xué)電子與計(jì)算機(jī)工程系教授陳怡然的消息,Karimi 教授通過(guò)「強(qiáng)迫他擔(dān)任副主編的雜志的作者引用這篇文章」來(lái)人為地增加引用數(shù)。因此,這位教授被終身禁止在 IEEE 的刊物和會(huì)議上發(fā)表文章。
@陳怡然 - 杜克大學(xué)。
以下是公告詳細(xì)內(nèi)容:
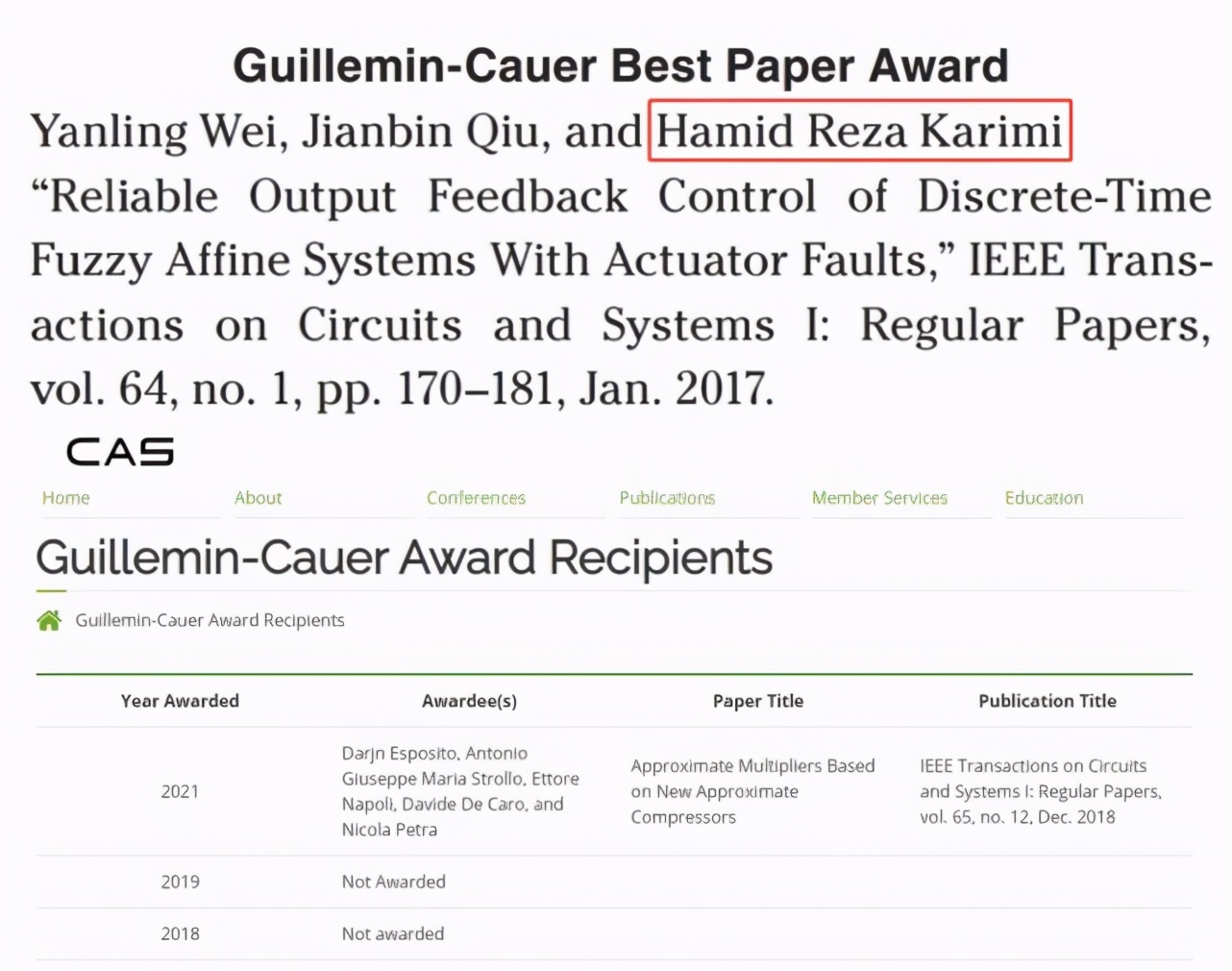
經(jīng)過(guò)正式組成委員會(huì)的認(rèn)真考慮,我們認(rèn)為,這篇論文《Reliable Output Feedback Control of Discrete-Time Fuzzy Affine Systems With Actuator Faults》的作者之一、米蘭理工大學(xué)(Politecnico di Milano)的 Hamid Reza Karimi 教授利用不正當(dāng)手段人為增加了論文引用量,由此違反了 IEEE 道德出版原則。
這篇發(fā)表于 2017 年的論文講了些什么呢?該論文主要研究了在描述符系統(tǒng)框架中具有執(zhí)行器故障的非線(xiàn)性系統(tǒng)的魯棒和可靠的 H∞靜態(tài)輸出反饋(SOF)控制。非線(xiàn)性設(shè)備的特征在于具有參數(shù)不確定性的離散時(shí)間 Takagi-Sugeno(T-S)模糊仿射模型,并利用馬爾可夫鏈來(lái)描述執(zhí)行器 - 故障行為。
具體地,通過(guò)采用「狀態(tài) - 輸出增強(qiáng)」方法,首先將原始系統(tǒng)重新構(gòu)造為描述符模糊仿射系統(tǒng)。基于新穎的分段馬爾可夫李雅普諾夫函數(shù)(LF),給出了底層系統(tǒng)的 H∞性能分析條件,并進(jìn)行了魯棒和可靠的 SOF 控制器綜合。結(jié)果表明,通過(guò)調(diào)用由描述符公式引起的冗余特性,再結(jié)合一些凸化技術(shù),可以通過(guò)凸優(yōu)化問(wèn)題的求解來(lái)明確確定所需可靠控制器的存在。最后,研究者通過(guò)仿真研究證實(shí)了所開(kāi)發(fā)方法的有效性。
截止 2021 年 3 月 22 日,這篇論文在 Google Scholar 上的引用數(shù)為 314,是過(guò)去五年被引數(shù)最多的論文之一。

這篇論文也榮獲了 2020 年度 IEEE Guillemin-Cauer 最佳論文獎(jiǎng),不過(guò)在 CAS 官網(wǎng)搜索該獎(jiǎng)項(xiàng)獲獎(jiǎng)?wù)撐臅r(shí),已找不到 2020 年的相關(guān)獲獎(jiǎng)信息。
獎(jiǎng)項(xiàng)地址:
https://ieee-cas.org/guillemin-cauer-award
Hamid Reza Karimi 簡(jiǎn)介
Hamid Reza Karimi 現(xiàn)為米蘭理工大學(xué)機(jī)械工程系的應(yīng)用機(jī)械學(xué)教授,主要研究興趣包括控制系統(tǒng)和機(jī)電一體化以及在汽車(chē)控制系統(tǒng)、振動(dòng)系統(tǒng)和風(fēng)能等領(lǐng)域的應(yīng)用。
1998 年,Hamid Reza Karimi 獲得了伊朗謝里夫理工大學(xué)的電力系統(tǒng)學(xué)士學(xué)位,之后又分別于 2001 年和 2005 年獲得了伊朗德黑蘭大學(xué)的控制系統(tǒng)工程碩士和博士學(xué)位。2010 至 2016 年,他成為了挪威阿格德?tīng)柎髮W(xué)的機(jī)電一體化教授。2016 年至今,他成為米蘭理工大學(xué)機(jī)械工程系的應(yīng)用機(jī)械學(xué)教授。
Karimi 還是《信息物理系統(tǒng)雜志》( Journal of Cyber-Physical Systems)、《電子學(xué)快報(bào)期刊》(IET)等七家期刊雜志的主編,更是《IEEE 模糊系統(tǒng)匯刊》、《IEEE 神經(jīng)網(wǎng)絡(luò)和學(xué)習(xí)系統(tǒng)匯刊》等十多家期刊雜志的主題編輯或副主編。他曾被科學(xué)網(wǎng)評(píng)為 2016-2020 工程領(lǐng)域最高引的研究者,也榮獲了 2020 年度《IEEE 電路與系統(tǒng)匯刊》Guillemin-Cauer 最佳論文獎(jiǎng)。
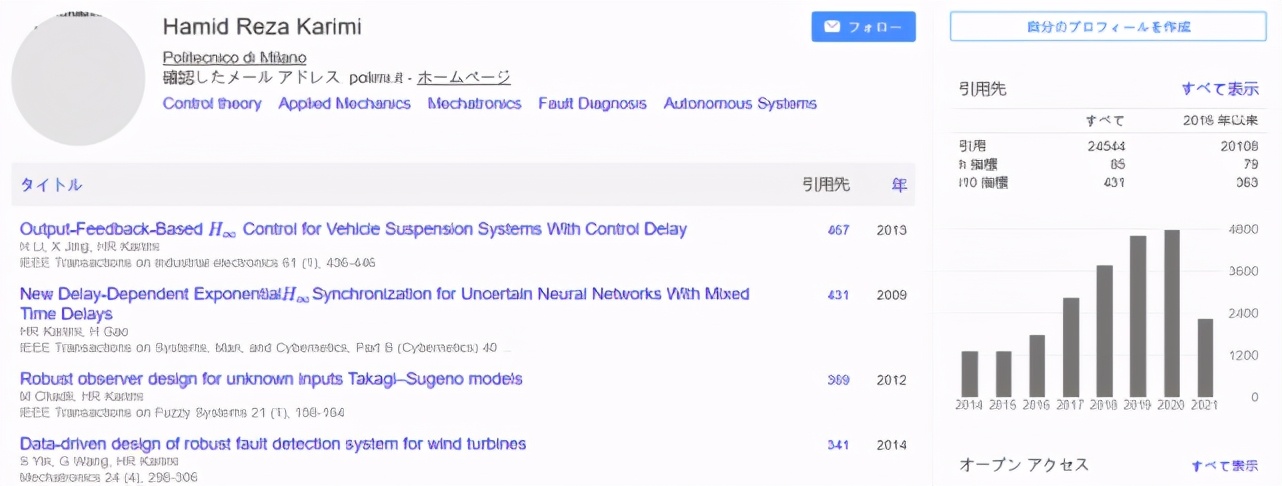
目前,Karimi 在 Google Scholar 上的論文總引用數(shù)近 25000。
地址:
https://scholar.google.com/citations?user=YcTS0ZMAAAAJ&hl=ja





















