













浙大機器魚登Nature:深入萬米馬里亞納海溝,里程碑式突破
人們第一次實現了軟體機器人的萬米深海操控,以及深海自主游動實驗,這是機器人領域的重大進展。
3 月 4 日,最新一期《自然》雜志以封面文章的形式介紹了由浙江大學、之江實驗室、中國科學院深海科學與工程研究所、國防科技大學、上海海洋大學、大連海事大學等團隊共同完成的新研究,論文標題為《Self-powered soft robot in the Mariana Trench》。

即使在地球海洋最深處——馬里亞納海溝「挑戰者深淵」10900 米的深處,這款機器人的魚鰭也能正常啟動,此處上覆水壓力約是海平面大氣壓的 1000 倍,可換算成約 1.03 億帕斯卡。紐約州立大學 Geneseo 的深海生理學家和生態學家 Mackenzie Gerringer 表示:「這相當于一頭大象站在你的拇指上。」
深海的巨大壓力為工程設計提出了嚴峻的挑戰,傳統的深海機器人或載人潛水器均采用堅固的金屬框架或壓力補償系統以求穩固,但這些機械龐大而笨重,且失靈風險仍然很高。浙大提出的軟體機器人新方法很大程度上解決了這一問題。

在深海中出現的極端條件意味著地球的絕大多數表面仍然處于未開發狀態,李鐵風等人設計的機器人受深海動物獅子魚啟發,開發了一種無束縛軟體機器人,通過將電子設備集成到硅樹脂基質中來保證動力、控制和驅動系統免受深海壓力,這種自供電的機器人消除了對任何剛性容器的需求,能夠在馬里亞納海溝的 10900 米的深度正常啟動,并在 3224 米深的南海自由行動。
以下動圖分別展示了軟體機器人在壓水室、深湖、南海和馬里亞納海溝四種測試場景中的游動:
機器人在壓水室中繞圈游動。

機器人在深度 70 米的湖中游動。
機器人在深度 3224 米的南海中自由游動。
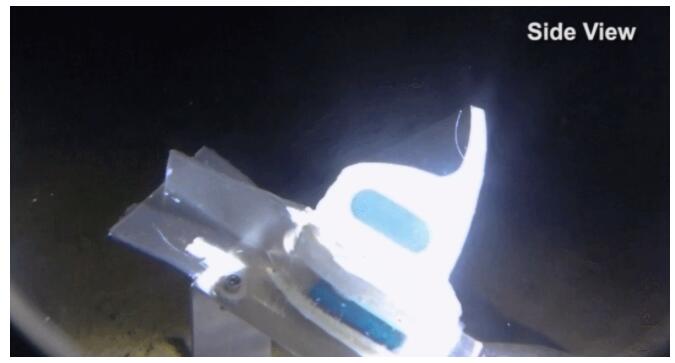
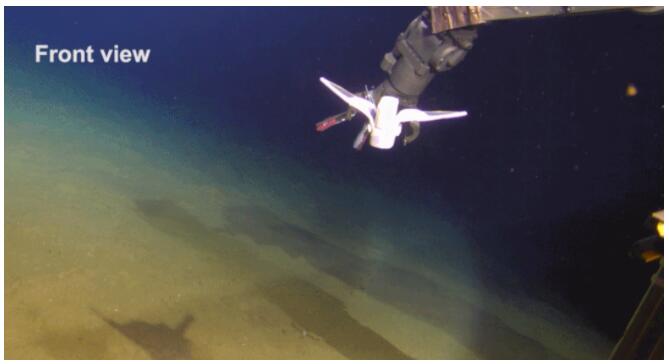
機器人在深度 10900 米的馬里亞納海溝拍打側鰭。
位于西太平洋的馬里亞納海溝是已知的海洋最深處,水壓高、溫度低、完全黑暗,被稱為「地球第四極」,而浙大等機構的工作率先實現了軟體機器人的萬米深海操控以及深海自主游動實驗。
柔軟,才能頂住巨大壓力
據論文介紹,浙大發明的這款軟材料機器人能夠探索未勘探過的海洋深處。更令人矚目的是,作者表示這款機器人能夠在目前地球已知最深的海溝—馬里亞納海溝進行操作。傳統的水下機器人需要金屬材料制成的水密外殼來抵抗深海高壓,這些水密外殼的厚度和尺寸必須隨著海水深度的增加而增加。與之不同,浙大軟體機器人采用的精密超軟硅膠電子元件嵌入和分布在軟體硅膠中,這種設計不需要耐壓外殼。
下圖為軟體機器人的整體設計與制作流程。
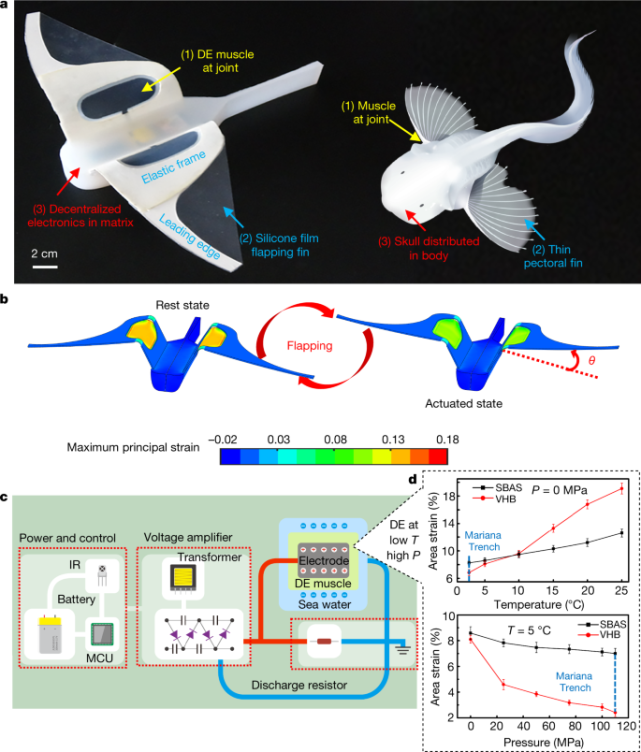
在具體的設計上,這款仿生軟體機器魚長 22cm(身長 11.5 厘米、尾長 10.5 厘米),翼展寬度 28cm,大約為一張 A4 紙的長寬,具有兩個拍動的側鰭,如下圖所示。
「我們的另一個研究突破,在于設計了一種能在高壓低溫環境下依然能保持良好電驅動性能的電驅動智能軟材料。」李鐵風教授表示。
作者使用一種完善的機制來驅動側鰭的拍動,并且側鰭附著于機器人軀干上的「肌肉」。這些肌肉由能夠將電能轉換為機械工的軟體材料制成,當機器人的電池為肌肉供電時,轉換開始。微小的固體結構機械地將收縮的肌肉連接到側鰭上,使它們拍動。
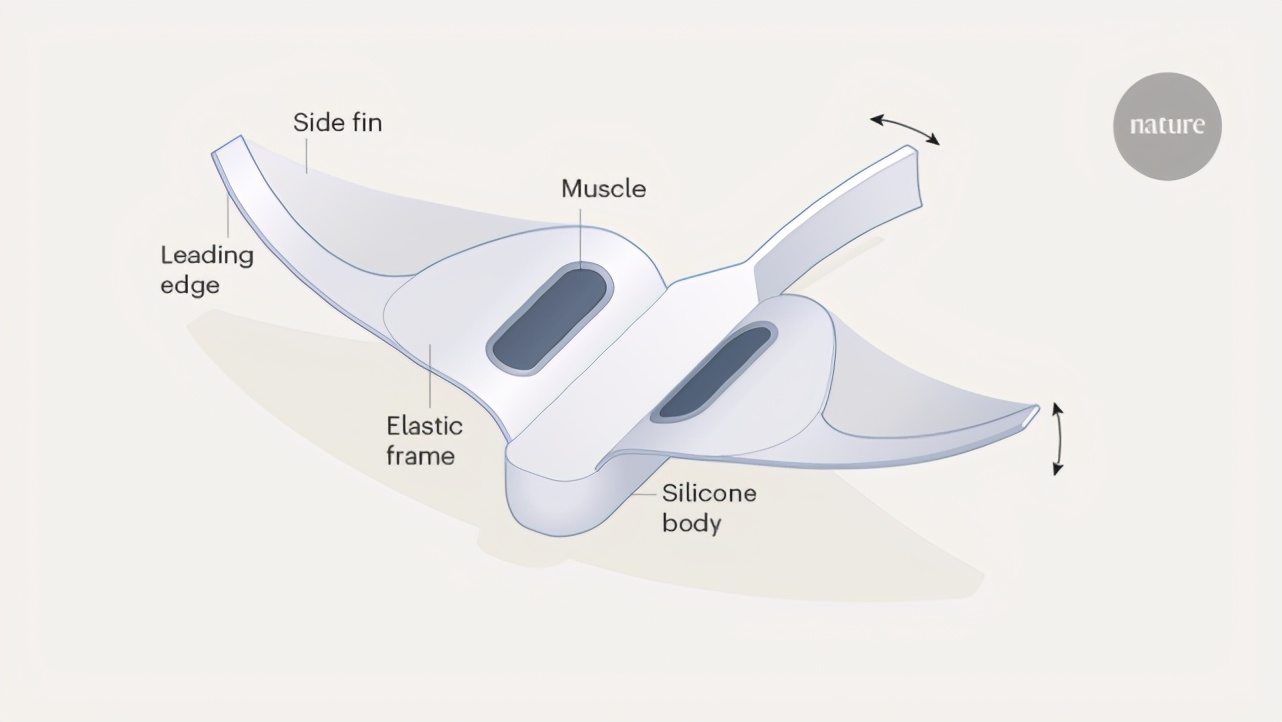
軟體機器人的軀干設計。

魚鰭拍動。
李國瑞和合作者面臨的挑戰之一是找到軟體機器人電子元件的耐高壓方法。他們從鈍口擬獅子魚(Pseudoliparis swirei)的頭骨中獲取了靈感——這種魚的頭骨并不完全由硬骨拼合而成,額外的延展性可以讓其承受的壓力得到平衡。新的機器人將電子元件分離,并包裹在柔軟的硅樹脂中,而沒有像常規的那樣堆疊在一起。
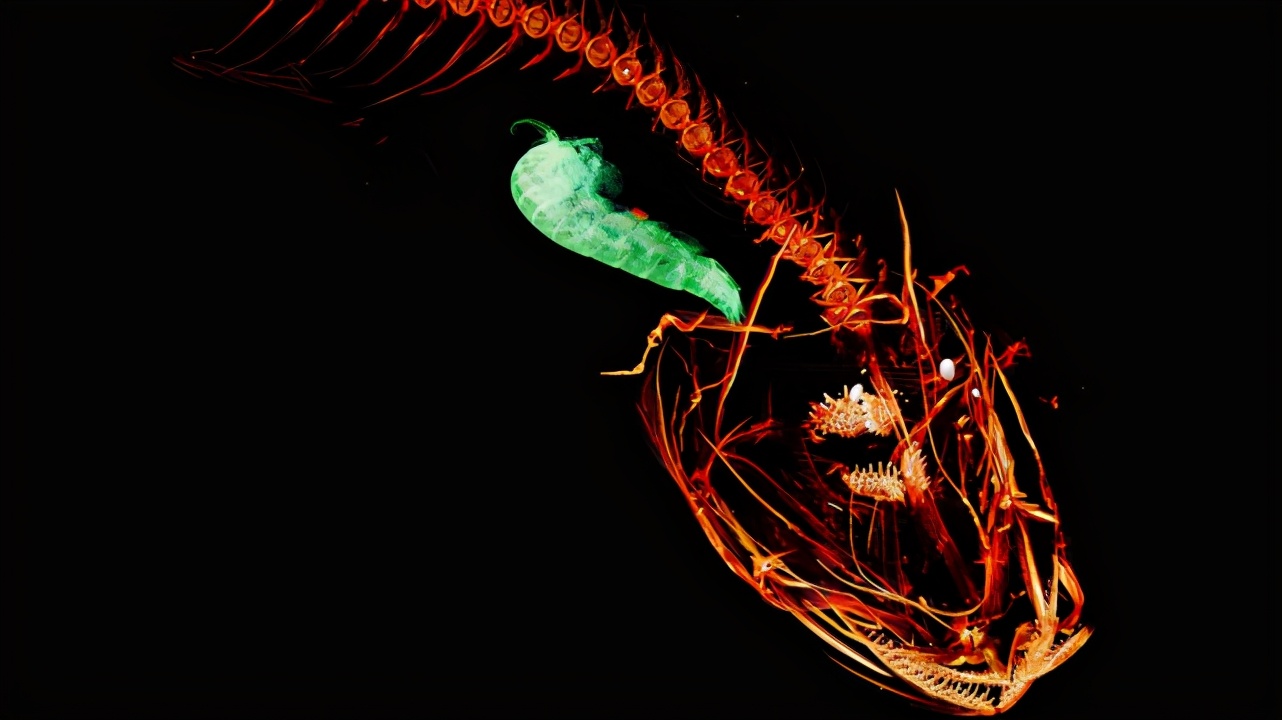
鈍口擬獅子魚(Pseudoliparis swirei)生活在西太平洋馬里亞納海溝等處 6200-8100 米的深海中,2014 年 11 月才被科學家們發現。
「相比于傳統的『鎧甲式』抗高壓深潛裝備,我們以全新技術路線研制仿生深海軟體機器人,爭取大幅降低深海探測的難度和成本。” 李國瑞說。
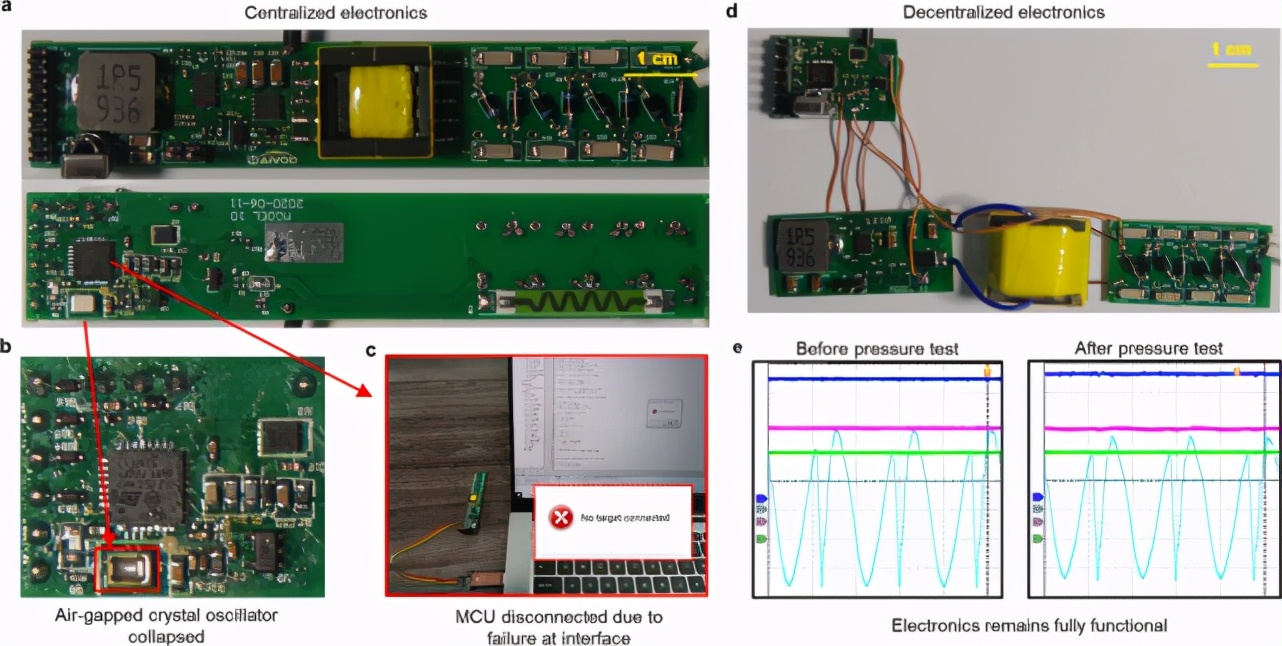
實驗測試和模擬結果表明,這種排列方式降低了水壓下電子元件之間接口處的壓力。然后,分離的電子元件嵌入至軟體硅膠進而并入到機器人中。對于保護深海設備的電子元件而言,這種方法比其他方法更實用且成本更低。下圖為集中式與分散式電子元件排列的壓力測試情況:
李國瑞等人首先在實驗室的一個壓水室中測試了軟體機器人的游泳能力,其中機器人與一個桿子相連,并繞著桿子游動。然后在深度 70 米的湖中進行測試,其中機器人以每秒 3.16 厘米的速度自由游動。接著在深度約 3200 米的南海中進行測試,機器人的速度達到了每秒 5.19 厘米(大約相當于每秒游了 0.45 個機器人軀干長度),這與其他軟體機器人的性能保持一致。最后在馬里亞納海溝進行機器人的側鰭拍動和耐壓測試,其中一個提供支持的水下機器人與它相連,并拍攝了測試圖像。
下圖(左)為機器人在壓水室和深湖中的測試;圖(右)為機器人在深海中的測試。
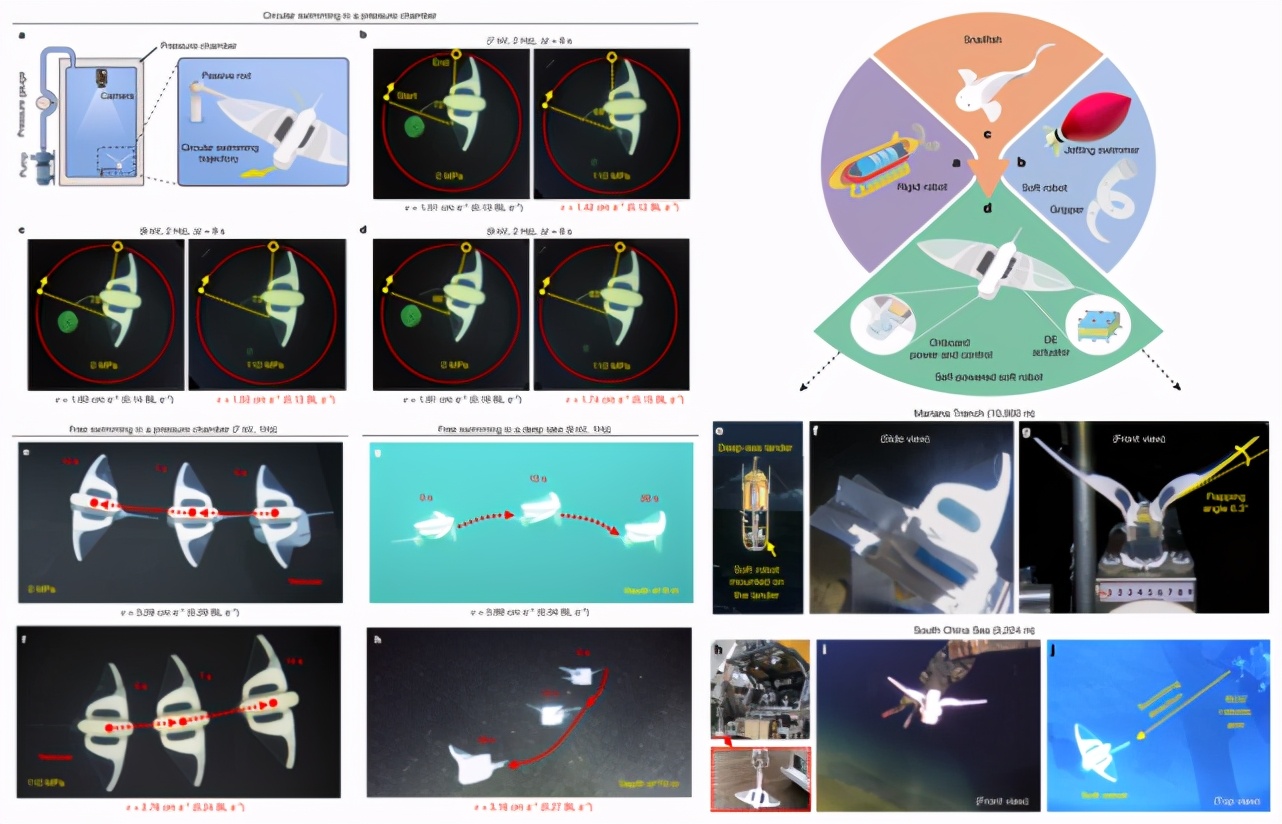
2019 年 12 月,軟體機器人在馬里亞納海溝坐底,海試影像記錄顯示,在馬里亞納海溝 10900 米海深處該機器人實現了穩定撲翼驅動。2020 年 8 月 27 日晚,該軟體機器人在南海 3224m 深處成功實現了自主游動。「凌晨三點,我們在主控室里一分一秒地注視著,等待機器人在海底啟動。當看到機器人成功完成預定游動時,懸著的心終于放了下來,數年的艱難探索終于取得了里程碑式進展。」李國瑞說。
深海軟體機器人的意義和潛在應用
先前針對開發水下應用軟體機器人已經進行了數次嘗試,但因為機器人傳感器在水下環境下無法很好地工作,因此該領域中機器人與物體進行精密交互是一項挑戰。當收集和處理供海洋生物學家研究的脆弱海洋生物時,軟體機器人抓手比剛性抓手裝置具有明顯的優勢。仿生軟體機器魚可以與其他魚類一起游動而不打擾它們,因此可以進行近距離研究。
現在,李國瑞及其同事們的研究突破了可以實現的范圍:用嵌入軟材料中的分布式電子設備代替電子元件的剛性保護罩,為新一代深海勘探者鋪平了道路。
當然,浙大等機構設計的機器人目前還存在一些需要改進的地方。首先它的游動速度有點慢,這意味著其無法承受海流的干擾,在針對具體應用時,人們還需要進一步強化其運動能力。但顯然,李國瑞等人的研究為具有可考性的深海探測機械奠定了基礎。
在不遠的未來,我們或許可以看到這種機器人帶來的全新海洋生物研究途徑:用軟體機器人安全地在海底珊瑚礁和洞穴間穿行。如果在海床上部署大量軟體機器人,則可以開發出更多生產力應用,包括海洋監測、有害物質清理和生物保護等方向。總而言之,能夠在惡劣環境中工作的機器人為人們探索廣闊海洋深處帶來了新的希望。
未來,該研究組將繼續研究深海軟體智能設備的能源、驅動、感知一體化系統,提升仿生深海軟體機器人的智能性,同時降低應用成本。
聯合研究團隊
浙江大學博士、之江實驗室智能機器人研究中心的高級研究專員李國瑞、浙江大學博士研究生陳祥平、周方浩為論文共同第一作者,浙江大學李鐵風教授為該論文通訊作者。
在研究過程中中,數值計算和大量壓力環境模擬實驗已經驗證了方案的可行性。為進一步證實機器人在深海實地環境下的可靠性,研究團隊在上海海洋大學、中科院深海所、大連海事大學、廣東海洋地質調查局等單位的合力支持下,先后在馬里亞納海溝、中國南海等海域開展了深海海試。
李鐵風教授(正中)與該研究的主要作者李國瑞、陳祥平、周方浩、梁藝鳴。
該論文通訊作者李鐵風是浙江大學教授、博士生導師,2012 年 8 月進入浙江大學應用力學研究所工作,加入浙江大學交叉力學中心,負責浙江大學軟體機器人與智能裝備實驗室。李鐵風教授的主要研究方向包括軟物質力學、智能材料結構設計、軟體機器人、水下智能裝備、 醫療康復裝置等,他開展了智能軟材料力學、智能結構、復合材料、軟體機器人等研究,提出通過控制力電失穩實現極大電致變形的驅動理論。
李鐵風教授曾在《Sciennce Advances》、《Advanced Materials》等期刊上發表論文 50 余篇,論文被引用次數 2000 余次,曾獲國家自然科學基金優秀青年基金、中國科協青年人才托舉工程、科學探索獎(前沿交叉領域、麻省理工科技評論科技創新 35 人(MIT TR35-China)等榮譽。





















