













3D視覺CV界的終極體現形式,計算機如何「看」這個三維世界
打開手機進行人臉解鎖;VR、AR 技術帶來如此虛擬卻真實的場景……3D 視覺幾乎無所不能,在智能家居、智能安防、汽車電子、工業測量、新零售、智能物流等領域發揮重要作用,堪稱賦能產業創新的最大推力。這些技術的背后涉及了 3D 視覺相關內容,那么計算機是如何「看」這個三維世界的?
隨著信息技術的快速發展,計算機視覺 3D 技術已經應用到了諸多領域,推動了虛擬現實(VR)、增強現實(AR)等技術的不斷進步。3D 視覺問題變得越來越重要,它提供了比 2D 更加豐富的圖像信息。
現如今,隨處可見 3D 視覺技術帶來的便利,工業機器人、工件識別與定位、3D 成像技術、產品虛擬設計、智能制造、自動駕駛、SLAM、無人機、3D 重建、人臉識別等等,都涉及到 3D 視覺相關內容。

3D 視覺應用舉例,圖源:https://zhuanlan.zhihu.com/p/52049458
總結來說,3D 視覺是計算機視覺與計算機圖形學高度交叉的一個重要研究方向。由于三維傳感技術的飛速發展和三維幾何數據的爆炸式增長,3D 視覺研究突破傳統的二維圖像空間,實現三維空間的分析、理解和交互。
我們生活在三維空間中,如何智能地感知和探索外部環境一直是個熱點課題。2D 視覺技術借助強大的計算機視覺和深度學習算法取得了超越人類認知的成就,而 3D 視覺則因為算法建模和環境依賴等問題,一直處于正在研究的前沿,而三維信息才真正能夠反映物體和環境的狀態,也更接近人類的感知模式。
隨著技術的不斷進步,三維視覺領域也取得了快速進步,例如 3D+AI 識別功能,掃描人臉三維結構完成手機解鎖;自動駕駛領域通過分析 3D 人臉信息,判斷司機駕駛時的情緒狀態;SLAM 通過重建周邊環境,完成建圖與感知;AR 領域通過三維重建技術完成目標的重現等。那么如此實用的技術,是怎樣實現的呢?
在深入了解之前,讓我們先來了解一下 3D 視覺技術的一些基礎知識。
3D 圖像介紹
在進行 3D 圖像介紹之前,首先簡單回顧一下 2D 圖像。我們日常生活中所見的圖像可以稱為物理圖像,這種圖像不能直接被計算機識別,需要轉換成數字格式,即數字圖像。數字圖像是二維圖像有限數字數值像素的表示。由數組或矩陣表示,其光照位置和強度都是離散的。其有兩種存儲方式:位圖存儲和矢量存儲,常見的存儲格式包括 PNG、GIF、JPEG、BMP 等。
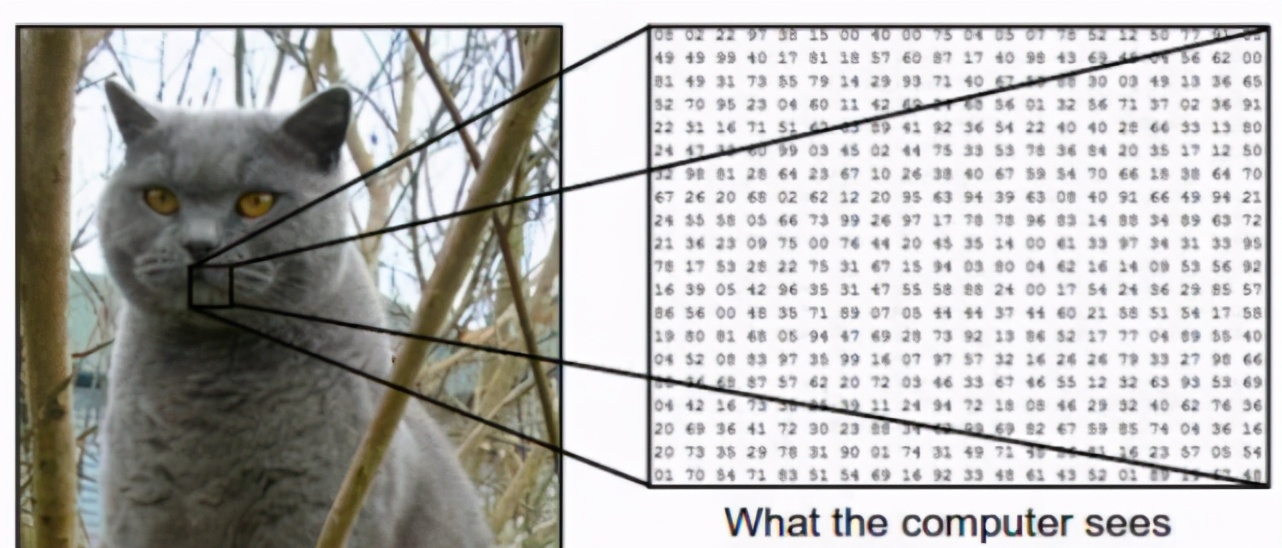
2D 圖像可分為二值圖像、彩色圖像等。其中二值圖像中每個像素可以由 0(黑) 到 255(白) 的亮度值表示。0-255 之間表示不同的灰度級。而彩色圖像是由三種不同顏色的灰度圖像組合而成,一個為紅色分量(R),一個為綠色分量(G),一個為藍色分量(B)。
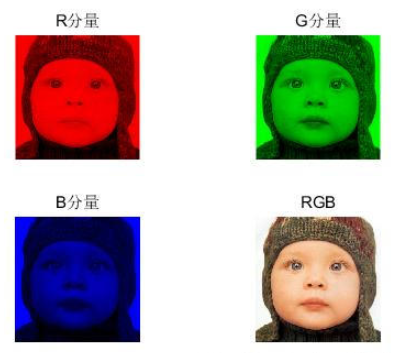
圖像彩色顯示法,RGB 圖像三個分量,圖源:https://blog.csdn.net/Hello_Chan/article/details/89094790
與二維圖像類似,三維圖像是在二維彩色圖像的基礎上又多了一個維度,即深度(Depth,D),可用一個很直觀的公式表示為:三維圖像 = 普通的 RGB 三通道彩色圖像 + Depth Map。
RGB-D
RGB-D 是廣泛使用的 3D 格式,其圖像每個像素都有四個屬性:即紅(R)、綠(G)、藍(B)和深度(D)。
深度圖是三維圖像特有的,是指存儲每個像素所用的位數,也用于度量圖像的色彩分辨率。確定彩色圖像每個像素可能有的顏色數,或者確定灰度圖像每個像素可能有的灰度級數。它決定了彩色圖像中可出現的最多顏色數,或灰度圖像中的最大灰度等級。其數值是規整的,適合直接用于現存的圖像處理框架。
關于深度圖的解釋,例如,一幅彩色圖像的每個像素用 R、G、B 三個分量表示,若每個分量用 8 位,那么一個像素共用 24 位表示,那么像素的深度為 24,則每個像素可以是 16777216(224) 種顏色中的一種。因此,可以把像素深度理解成是深度圖像距離值。表示一個像素的位數越多,它能表達的顏色數目就越多,而它的深度就越深。
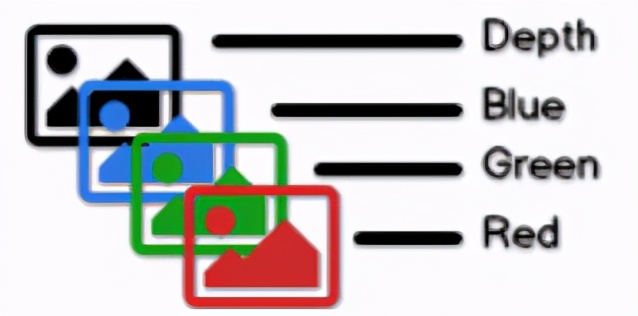
RGB-D 圖像格式,圖源:https://www.sohu.com/a/249567571_114877
在一般的基于像素的圖像中,我們可以通過(x,y)坐標定位任何像素,分別獲得三種顏色屬性(R,G,B)。而在 RGB-D 圖像中,每個(x,y)坐標將對應于四個屬性(深度 D,R,G,B)。
點云
我們在做 3D 視覺的時候,處理的主要是點云,點云就是一些點的集合。相對于圖像,點云有其不可替代的優勢——深度,也就是說三維點云直接提供了三維空間的數據,而圖像則需要通過透視幾何來反推三維數據。
何為點云?其實點云是某個坐標系下的點的數據集。點包含了豐富的信息,包括三維坐標 X,Y,Z、顏色、分類值、強度值、時間等等。點云在組成特點上分為兩種,一種是有序點云,一種是無序點云。
點云示例,圖源:https://www.jianshu.com/p/ffedad5e8e30
點云的獲取:點云不是通過普通的相機拍攝得到的,一般是通過三維成像傳感器獲得,比如雙目相機、三維掃描儀、RGB-D 相機等。目前主流的 RGB-D 相機有微軟的 Kinect 系列、Intel 的 realsense 系列、structure sensor(需結合 iPad 使用)等。點云可通過掃描的 RGB-D 圖像,以及掃描相機的內在參數創建點云,方法是通過相機校準,使用相機內在參數計算真實世界的點(x,y)。因此,RGB-D 圖像是網格對齊的圖像,而點云則是更稀疏的結構。此外,獲得點云的較好方法還包括 LiDAR 激光探測與測量,主要通過星載、機載和地面三種方式獲取。
點云的內容:根據激光測量原理得到的點云,包括三維坐標(XYZ)和激光反射強度(Intensity),強度信息與目標的表面材質、粗糙度、入射角方向以及儀器的發射能量、激光波長有關。根據攝影測量原理得到的點云,包括三維坐標(XYZ)和顏色信息(RGB)。結合激光測量和攝影測量原理得到點云,包括三維坐標(XYZ)、激光反射強度(Intensity)和顏色信息(RGB)。
點云的屬性:空間分辨率、點位精度、表面法向量等。
雖然 RGB-D 相機應用廣泛,但會受到很多硬件的限制,目前深度相機輸出的深度圖存在很多問題,比如對于光滑物體表面反射、透明物體、半透明物體、深色物體等都會造成深度圖缺失。而且很多深度相機是大片的深度值缺失,后續還需要進一步的深度圖補全操作。
圖源:https://www.cnblogs.com/CV-life/p/10105480.html
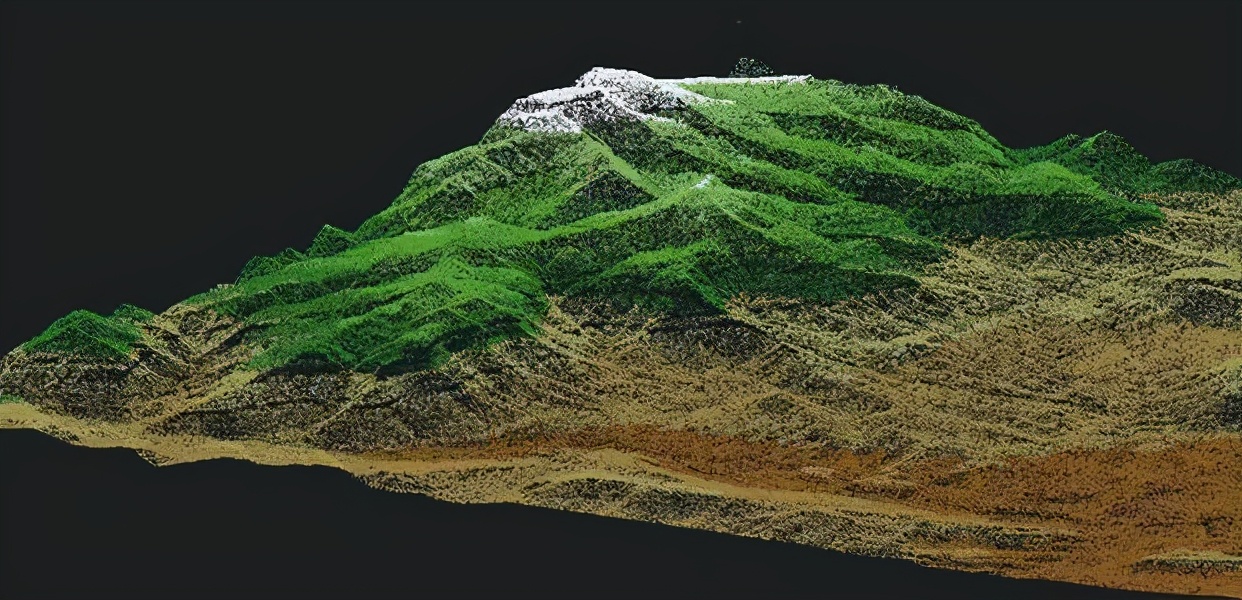
上圖為拍攝的室外一個街道的點云圖,如果仔細觀察,能看清建筑物、樹木的輪廓等。就上圖而言,點云的優點可以歸為以下幾點:首先,點云可以表達物體的空間輪廓和具體位置,我們能看到街道、房屋的形狀,物體距離攝像機的距離也是可知的;其次,點云本身和視角無關,可以任意旋轉,從不同角度和方向觀察一個點云,而且不同的點云只要在同一個坐標系下就可以直接融合。
接下來,放大點云,如下圖所示,如果將點云放大,最后看到的就是一個個離散的點。也就是空間中成千上萬的點組成了一個點的集合,這個點集合構成了上面的街道房屋等。
點云放大圖,圖源:https://www.cnblogs.com/CV-life/p/10105480.html
從放大的點云圖側面反映了點云的缺點,可歸結為以下幾點:三維點云比圖像多了一個維度,即深度;點云是不規則分布的,相比于圖像式的規整網格更難處理;點云缺少了圖像中的紋理,而是一個個孤立的點,會丟失很多信息。除此以外,點云是分布在空間中(XYZ 點)非結構化數據(無網格);在圖像中,像素的數量是一個給定的常數,取決于相機。然而,點云的數量可能會有很大的變化,取決于各種傳感器;點云的分辨率和離相機的距離有關。不能近距離的觀察,只能在一個很遠的視角才能觀察整體。
下面來看一下點云結果對比,原始的 RGB-D 生成的點云結果如下:
圖源:https://zhuanlan.zhihu.com/p/42084058
下面動圖顯示了經過深度圖補全后生成的點云結果如下:

圖源:https://zhuanlan.zhihu.com/p/42084058
點云的數據存儲格式
點云存儲文件格式有很多。一些文件格式致力于標準化與通用性,而今被多個相關軟件或軟件庫所支持,也被大多數業內人士所認同和使用。點云目前的主要存儲格式包括:pts、LAS、PCD、.xyz 和. pcap 等。選擇合適的通用格式可以更好地與其它工具乃至其它組織對接,進而提高工作效率。下面簡單列舉一下點云的數據存儲格式。
pts 點云文件格式是最簡便的點云格式,直接按 XYZ 順序存儲點云數據, 可以是整型或者浮點型。如下圖是截取的塑像點云的一部分。示例如下:
LAS 是激光雷達數據(LiDAR),存儲格式比 pts 復雜,旨在提供一種開放的格式標準,允許不同的硬件和軟件提供商輸出可互操作的統一格式。現在 LAS 格式文件已成為 LiDAR 數據的工業標準格式。示例如下:
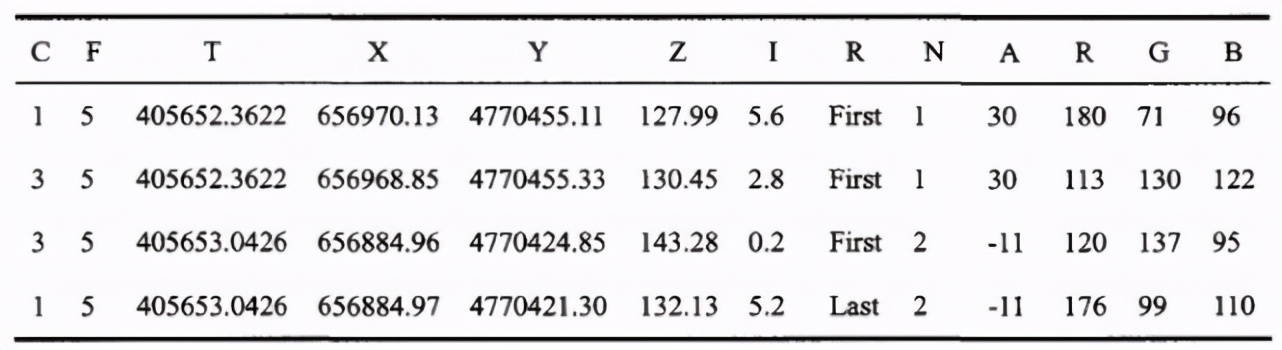
LAS 格式點云截圖,其中 C:class(所屬類),F:flight(航線號),T:time(GPS 時間),I:intensity(回波強度),R:return(第幾次回波),N:number of return(回波次數),A:scan angle(掃描角),RGB:red green blue(RGB 顏色值)。圖源:https://www.cnblogs.com/chenbokai/p/6010143.html
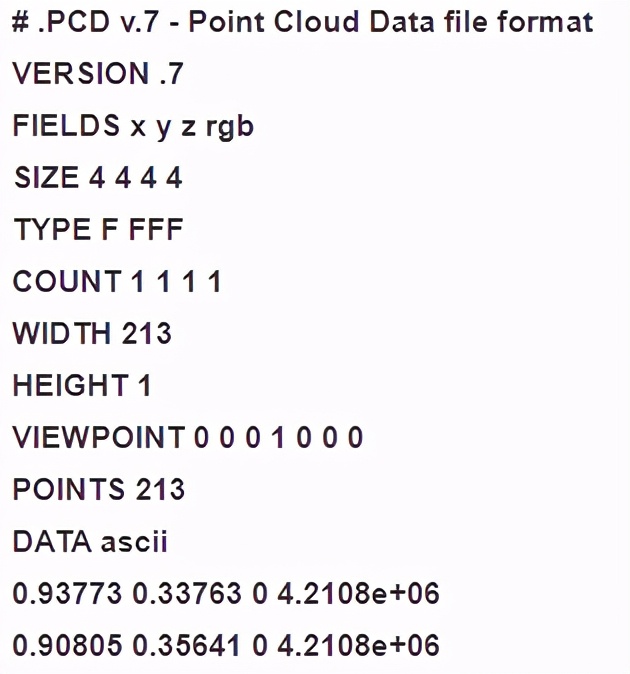
PCD 存儲格式,現有的文件結構因本身組成的原因不支持由 PCL 庫(后文會進行介紹)引進 n 維點類型機制處理過程中的某些擴展,而 PCD 文件格式能夠很好地補足這一點。PCD 格式具有文件頭,用于描繪點云的整體信息:定義數字的可讀頭、尺寸、點云的維數和數據類型;一種數據段,可以是 ASCII 碼或二進制碼。數據本體部分由點的笛卡爾坐標構成,文本模式下以空格做分隔符。
PCD 存儲格式是 PCL 庫官方指定格式,典型的為點云量身定制的格式。優點是支持 n 維點類型擴展機制,能夠更好地發揮 PCL 庫的點云處理性能。文件格式有文本和二進制兩種格式。示例如下:
圖源:https://cloud.tencent.com/developer/article/1475778
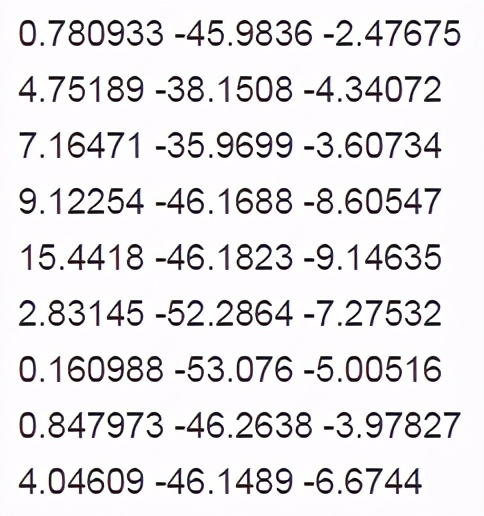
.xyz 一種文本格式,前面 3 個數字表示點坐標,后面 3 個數字是點的法向量,數字間以空格分隔。示例如下:
.pcap 是一種通用的數據流格式,現在流行的 Velodyne 公司出品的激光雷達默認采集數據文件格式。它是一種二進制文件。
數據構成結構如下:
整體一個全局頭部 (GlobalHeader),然后分成若干個包(Packet),每個包又包含頭部(Header)和數據(Data)部分。
相應基礎算法庫對不同格式的支持
點云的數據量龐大,需要專門的數據存儲庫進行顯示和保存。例如,一張 640 x 480 尺寸的深度圖就可以轉換為大約三十萬個空間點的點云,大的點云可達百萬甚至千萬以上,這時專門用來進行點云的讀寫、處理等各種操作數據存儲庫就顯得非常重要。
PCL(Point Cloud Library)庫支持跨平臺存儲,可以在 Windows、Linux、macOS、iOS、Android 上部署。可應用于計算資源有限或者內存有限的應用場景,是一個大型跨平臺開源 C++ 編程庫,它實現了大量點云相關的通用算法和高效數據結構,其基于以下第三方庫:Boost、Eigen、FLANN、VTK、CUDA、OpenNI、Qhull,實現點云相關的獲取、濾波、分割、配準、檢索、特征提取、識別、追蹤、曲面重建、可視化等操作,非常方便移動端開發。
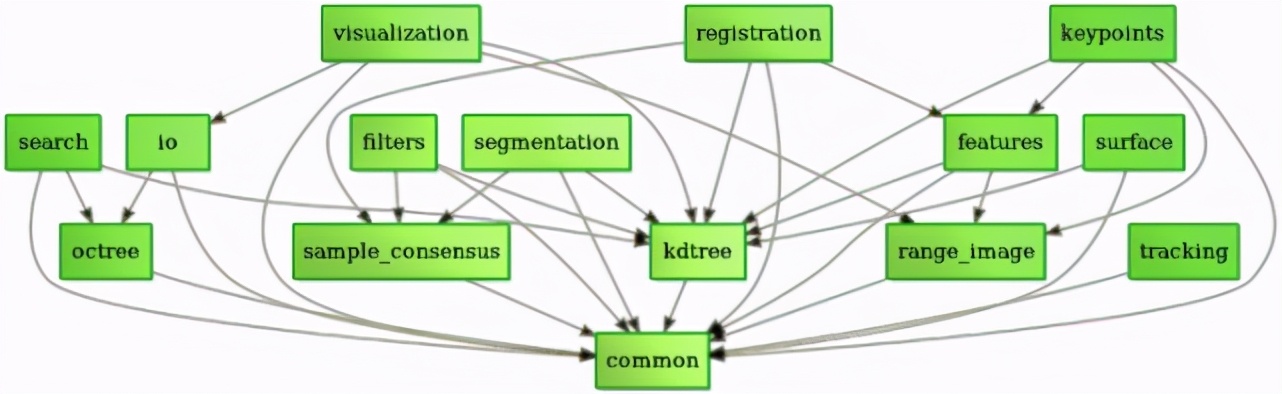
此處的 common 指的是點云數據的類型,包括 XYZ、XYZC、XYZN、XYZG 等很多類型點云。可以看出,低層次的點云處理主要包括濾波(filters)、關鍵點(keypoints)、邊緣檢測。點云的中層次處理則是特征描述(feature)、分割(segmention)與分類。高層次處理包括配準(registration)、識別(recognition)。
除了 PCL 庫以外,VCG 庫(Visulization and Computer Graphics Libary)是專門為處理三角網格而設計的,該庫很大,且提供了許多先進的處理網格的功能,以及比較少的點云處理功能。
CGAL(Computational Geometry Algorithms Library)計算幾何算法庫,設計目標是以 C++ 庫的形式,提供方便、高效、可靠的幾何算法,其實現了很多處理點云以及處理網格的算法。
Open3D 是一個可以支持 3D 數據處理軟件快速開發的開源庫。支持快速開發處理 3D 數據的軟件。Open3D 前端在 C++ 和 Python 中公開了一組精心選擇的數據結構和算法。后端經過高度優化,并設置為并行化。Open3D 是從一開始就開發出來的,帶有很少的、經過仔細考慮的依賴項。它可以在不同的平臺上設置,并且可以從源代碼進行最小的編譯。代碼干凈,樣式一致,并通過清晰的代碼審查機制進行維護。在點云、網格、rgbd 數據上都有支持。
本文是針對 3D 視覺的總結性文章,介紹了幾個比較重要的知識點,希望可以在一定程度上幫助大家更深刻地理解 3D 視覺。在接下來的文章中,我們將繼續介紹 3D 視覺領域算法的實現。




















