如何可視化卷積網(wǎng)絡(luò)分類圖像時(shí)關(guān)注的焦點(diǎn)
你在訓(xùn)練神經(jīng)網(wǎng)絡(luò)進(jìn)行圖片分類時(shí),有沒有想過網(wǎng)絡(luò)是否就是像人類感知信息一樣去理解圖像?這個(gè)問題很難回答,因?yàn)槎鄶?shù)情況下深度神經(jīng)網(wǎng)絡(luò)都被視作黑箱。我們喂給它輸入數(shù)據(jù)進(jìn)而得到輸出。整個(gè)流程如果出現(xiàn)問題很難去調(diào)試。盡管預(yù)測(cè)的已經(jīng)相當(dāng)精準(zhǔn),但這并不能說(shuō)明他們足以和人類感知的方式媲美。
為何會(huì)這樣?
假設(shè)你需要對(duì)大象和企鵝進(jìn)行二分類(我知道這個(gè)任務(wù)十分簡(jiǎn)單)。現(xiàn)在你已經(jīng)獲取了數(shù)據(jù)集,訓(xùn)好了模型并完成部署。這個(gè)模型想必是適用于絕大多數(shù)數(shù)據(jù)的,但是總有可能會(huì)出現(xiàn)誤判。有人可能會(huì)把它看作是一個(gè)極端情況,但是你覺得對(duì)于 CNN 來(lái)說(shuō),什么時(shí)候物體才是明確可辨的?
結(jié)合上述內(nèi)容,顯然在圖像中,大象常伴著草木出現(xiàn),企鵝常伴著冰雪出現(xiàn)。所以,實(shí)際上模型已經(jīng)學(xué)會(huì)了分辨草木與冰雪的顏色/形狀,而不是真的學(xué)會(huì)了按對(duì)象分類。
由上文案例知,如顏色通道統(tǒng)計(jì)那樣的簡(jiǎn)單圖像處理技術(shù),與訓(xùn)練模型是一樣的。因?yàn)樵跊]有智能的情況下,模型只能依靠顏色辯物。現(xiàn)在你或許會(huì)問,如何知道 CNN 究竟在尋找什么?答案就是,Grad-CAM。
加權(quán)梯度類激活映射(Grad-CAM)
我們?cè)诒酒┛椭袑?shí)現(xiàn)了加權(quán)梯度類激活映射。首先,我們要知道這不是唯一的解決方案。原作說(shuō),
加權(quán)梯度類激活映射 (Grad-CAM) 通過任意目標(biāo)概念的梯度(比如說(shuō)類別「狗」的分對(duì)數(shù)甚至是「狗」這個(gè)字),將這些知識(shí)傳遞到***的卷積層進(jìn)而產(chǎn)生一張粗略的定位圖,用于凸顯圖像中對(duì)于預(yù)測(cè)相關(guān)概念至關(guān)重要的區(qū)域。
通俗點(diǎn)講,我們只取最終卷積層的特征圖,然后將該特征中的每個(gè)通道通過與該通道相關(guān)的類的梯度進(jìn)行加權(quán)。這種方法只不過是輸入圖像如何通過每個(gè)通道對(duì)于類的重要性來(lái)激活不同的通道,最重要的是它不需要對(duì)現(xiàn)有架構(gòu)進(jìn)行任何重訓(xùn)練或更改。

特定類的特征空間得分就是對(duì)應(yīng)類的輸出值 y^c 關(guān)于特征圖 A_ij 的偏導(dǎo)在 i 和 j 維上的特征進(jìn)行全局平均池化操作。然后,我們將結(jié)果與特征圖沿其通道軸 k 相乘。***,將結(jié)果在通道維度 k 上求平均/池化。因此,特征空間的得分凸的大小是 i×j。Σ 符號(hào)用于描述池化和平均操作。
用于得分圖,隨后被歸一化以便輸出正區(qū)域預(yù)測(cè)")
ReLU 激活函數(shù)用于得分圖,隨后被歸一化以便輸出正區(qū)域預(yù)測(cè)
實(shí)現(xiàn)
為了達(dá)到本篇博客的目的,我們套用一個(gè)預(yù)訓(xùn)練好的 VGG 模型,并導(dǎo)入一些必要包開始實(shí)現(xiàn)代碼。
- from keras.applications.vgg16 import VGG16, preprocess_input, decode_predictions
- from keras.preprocessing import image
- import keras.backend as K
- import numpy as np
- import cv2
- import sys
我們使用 Keras 自帶的 VGG16 模型。并加載一些有助于加載和處理圖像的函數(shù)。
- model = VGG16(weights="imagenet")
- img_path = sys.argv[1]
- img = image.load_img(img_path, target_size=(224, 224))
- x = image.img_to_array(img)
- x = np.expand_dims(x, axis=0)
- x = preprocess_input(x)
我們先初始化模型并通過命令行參數(shù)加載圖片。VGG 網(wǎng)絡(luò)只接受 (224×224×3) 大小的圖片,所以我們要把圖片放縮到指定大小。由于我們只通過網(wǎng)絡(luò)傳遞一個(gè)圖像,因此需要擴(kuò)展***個(gè)維度,將其擴(kuò)展為一個(gè)大小為 1 的批量。然后,我們通過輔助函數(shù) preprocess_input 從輸入圖像中減去平均 RGB 值來(lái)實(shí)現(xiàn)圖像的歸一化。
- preds = model.predict(x)
- class_idx = np.argmax(preds[0])
- class_output = model.output[:, class_idx]
- last_conv_layer = model.get_layer("block5_conv3")
此處,我們來(lái)看看頂部預(yù)測(cè)的特征圖。所以我們得到圖像的預(yù)測(cè),并給得分靠前的類做個(gè)索引。請(qǐng)記住,我們可以為任意類計(jì)算特征圖。然后,我們可以取出 VGG16 中***一個(gè)卷積層的輸出 block5_conv3。得到的特征圖大小應(yīng)該是 14×14×512。
- grads = K.gradients(class_output, last_conv_layer.output)[0]
- pooled_grads = K.mean(grads, axis=(0, 1, 2))
- iterate = K.function([model.input], [pooled_grads, last_conv_layer.output[0]])
- pooled_grads_value, conv_layer_output_value = iterate([x])
- for i in range(512):
- conv_layer_output_value[:, :, i] *= pooled_grads_value[i]
如上所述,我們計(jì)算相類輸出值關(guān)于特征圖的梯度。然后,我們沿著除了通道維度之外的軸對(duì)梯度進(jìn)行池化操作。***,我們用計(jì)算出的梯度值對(duì)輸出特征圖加權(quán)。
- heatmap = np.mean(conv_layer_output_value, axis=-1)
- heatmap = np.maximum(heatmap, 0)
- heatmap /= np.max(heatmap)
然后,我們沿著通道維度對(duì)加權(quán)的特征圖求均值,從而得到大小為 14*14 的熱力圖。***,我們對(duì)熱力圖進(jìn)行歸一化處理,以使其值在 0 和 1 之間。
- img = cv2.imread(img_path)
- heatmap = cv2.resize(heatmap, (img.shape[1], img.shape[0]))
- heatmap = np.uint8(255 * heatmap)
- heatmap = cv2.applyColorMap(heatmap, cv2.COLORMAP_JET)
- superimposed_img = cv2.addWeighted(img, 0.6, heatmap, 0.4, 0)
- cv2.imshow("Original", img)
- cv2.imshow("GradCam", superimposed_img)
- cv2.waitKey(0)
***,我們使用 OpenCV 來(lái)讀圖片,將獲取的熱力圖放縮到原圖大小。我們將原圖和熱力圖混合,以將熱力圖疊加到圖像上。
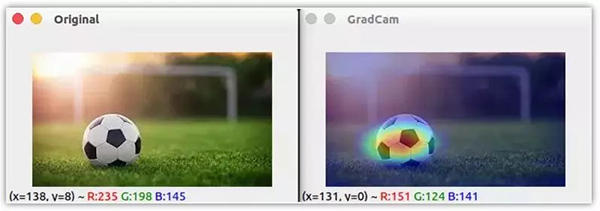
從上面的圖片可以清楚地看到 CNN 在圖像中尋找的是區(qū)分這些類的地方。這種技術(shù)不僅適用于定位,還可用于視覺問答、圖像標(biāo)注等。
此外,它在調(diào)試建立精確模型的數(shù)據(jù)需求方面非常有幫助。雖然此技術(shù)并未過多涉及調(diào)參,但我們可以使用額外的數(shù)據(jù)和數(shù)據(jù)增強(qiáng)技術(shù)更好地泛化模型。
原文鏈接:http://www.hackevolve.com/where-cnn-is-looking-grad-cam/
【本文是51CTO專欄機(jī)構(gòu)“機(jī)器之心”的原創(chuàng)譯文,微信公眾號(hào)“機(jī)器之心( id: almosthuman2014)”】